内存统计 Memory accounting
张量基础 tensors basics
- 张量是深度学习中存储一切信息的基础构建
张量内存 tensors memory
- 几乎所有重要张量都以浮点形式储存
- 参数, 梯度, 激活值…..
float32
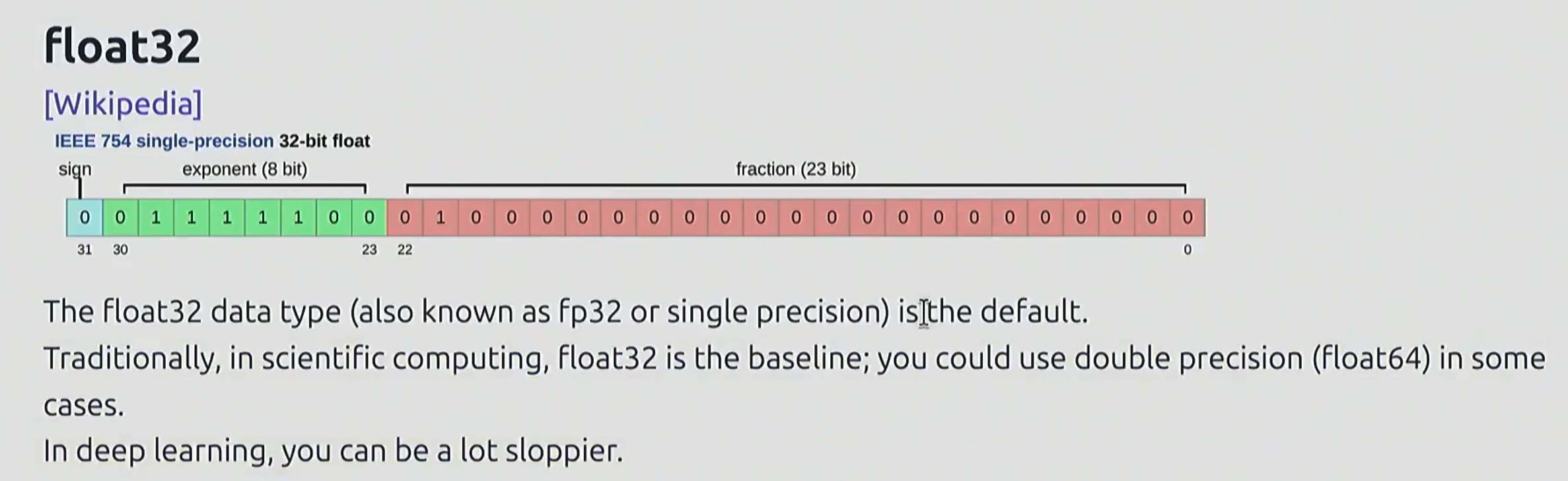
一共占 32 bits, 其中 1 位表示符号, 8 位表示指数, 23 位表示小数
基本信息
- 又叫做 fp32, 单精度. 是默认数据类型
- 在深度学习领域, 由于在数据精度上不拘小节, fp32 已经是上限了
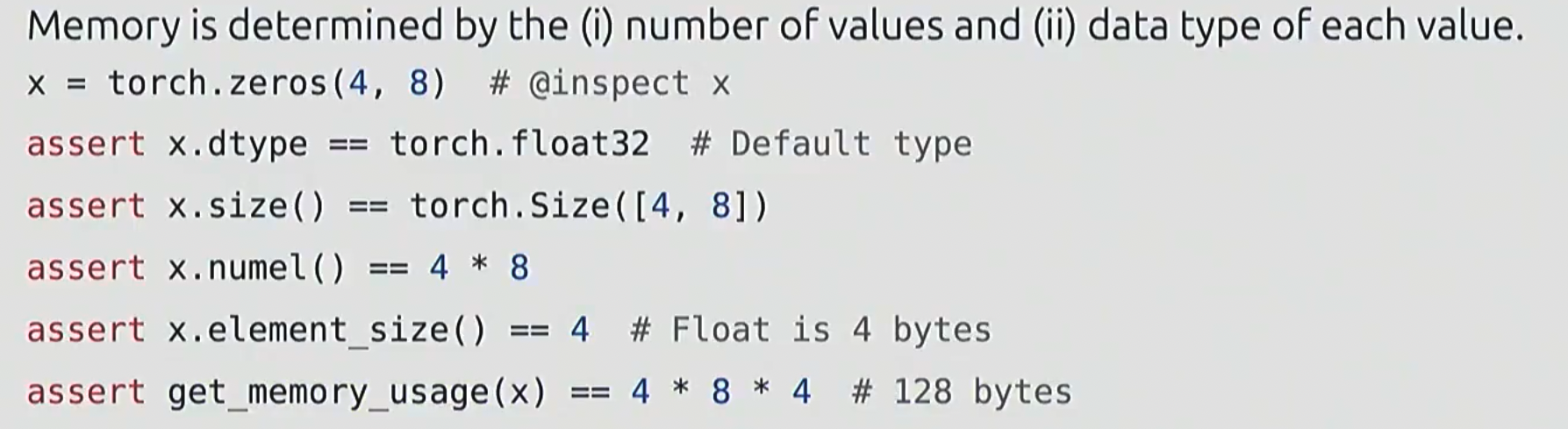
内存占用
float16
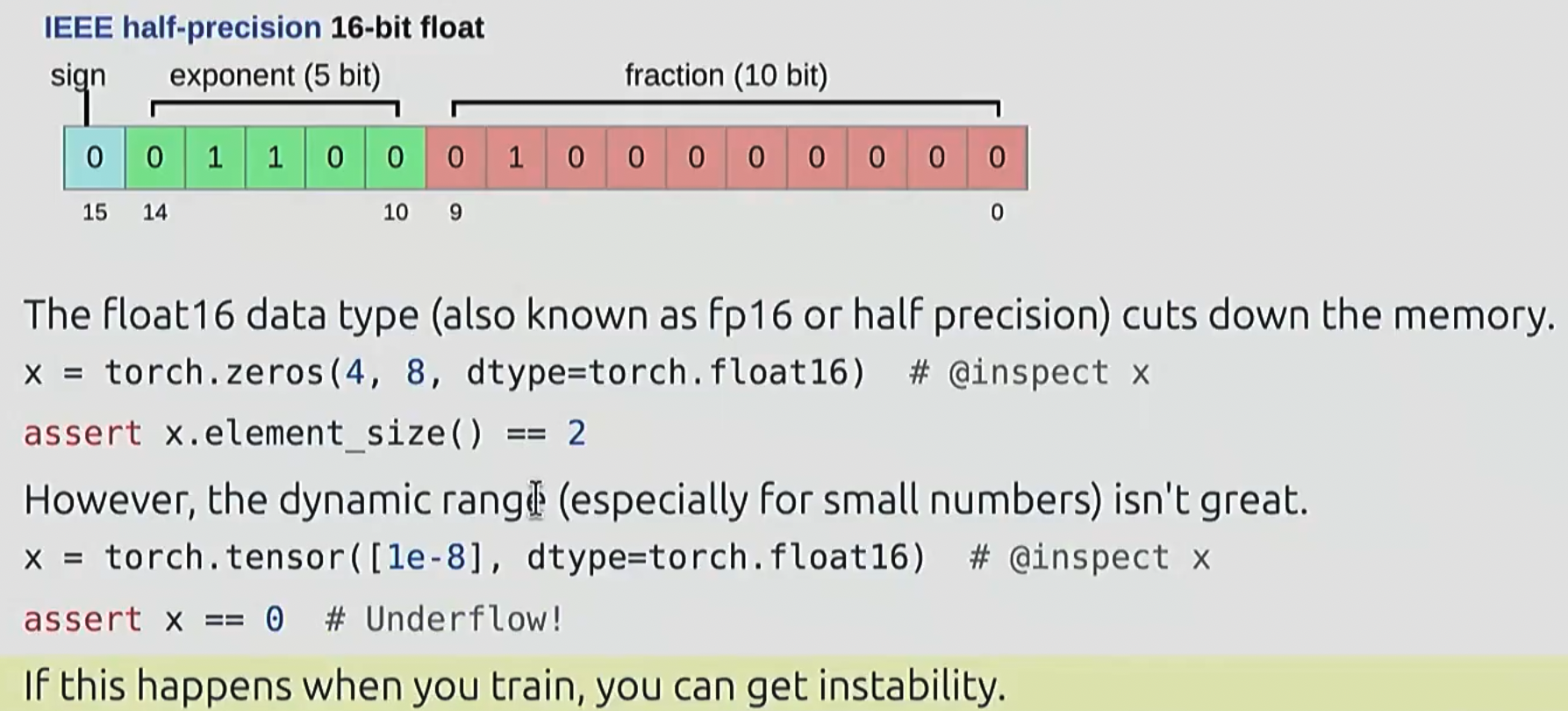
- 16bits, 其中 1 位符号, 5 位指数, 10 位小数
- 被称为 fp16, 半精度
- 动态范围不太理想, 因此在训练中可能不太稳定
bfloat16
- Google Brain 提出, 称为 brain floating point
- 专门用于解决动态范围小的问题
- 这里增加了用于表示指数的 bits, 减少了用于表示小数/分数的 bits, 使得用 16 bits 即可达到 float32 的动态范围
- 对于深度学习, 小数的精度相比于指数数量级 没有那么重要
- 通常用 bf16 进行运算
fp8
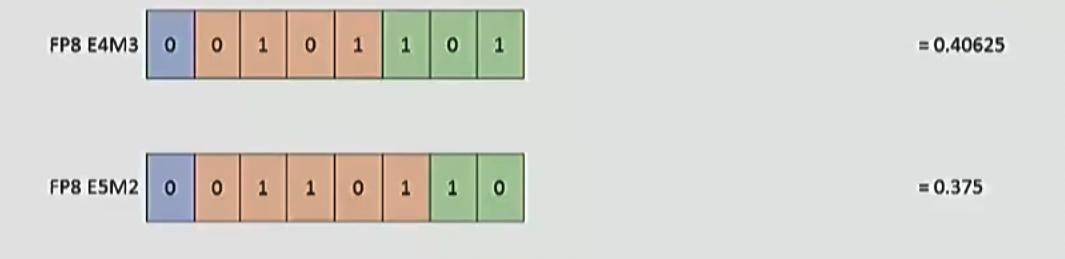
- 英伟达提出, 专为机器学习任务优化
- 占用空间小, 但是失去了很多精度/动态范围
精度选择
- 用 fp32 训练效果好, 但是占用内存大
- 用 fp8, fp16, bfloat16 有一定的不稳定的风险
解决方法: 使用混合精度训练, 为每一个环节设计并指定对应的合适地精度类型
计算统计 Compute accounting
GPU 上的张量 tensors on GPUs
- 默认情况下, 张量被存储在内存(CPU memory)中
- 然而在 CPU 上处理相关计算很慢, 因此需要指定张量移动到 GPU 上
张量运算 tensor operations
- 大多数张量是通过对其他张量执行操作而创建
- 每个计算都会有一定的内存和计算开销
张量存储 tensor storage
- Pytorch 中, 张量是指向内存的指针
- 存储方式其实跟 C 语言里的高维数组很像?
张量切片 tensor slicing
-
许多运算只是变换了同一张量的展现形式
-
因此需要搞清楚一些张量运算到底是在原张量操作, 还是在张量的副本上操作
-
对于 transpose 等操作, 会导致张量不再连续, 因此在 view 的时候需要先使用
contiguous()方法
张量的按位运算 tensor elementwise
张量矩阵乘法 tensor matmul
tensor einops
我也不知道这个 einops 是啥, 大概是某一个库吧
出现的动机
在 torch 中, 我们常常会对不同维度进行一些操作和运算
然而这相对比较抽象, 记忆每个维度对应的含义也并非易事
因此, 我们引入 einops 方法, 对每个维度对应的含义进行标记, 避免混淆
einops_einsum
einsum 全称是 Einstein Summation(爱因斯坦求和约定),它通过字符串公式定义张量运算,语义清晰、灵活强大,主要用于:
- 张量乘法(内积 / 外积 / 点积 / 矩阵乘法等)
- 转置与重排
- 批量广播计算
- 自动求和(隐式 sum)
|
|
- 相同字母表示对齐维度
- 输出中不出现的维度会被求和掉(sum)
- 不同字母表示保持独立维度
einops_reduce
einops.reduce 是 einops 库中的一个核心函数,用来对张量进行指定维度的聚合运算,比如:
- 求和(sum)
- 求均值(mean)
- 最大值(max)
- 最小值(min)
|
|
- tensor:输入的张量(如 PyTorch 的 Tensor)
- pattern:字符串,描述你想保留和聚合的维度
- reduction:字符串,表示使用哪种聚合方式,如 ‘sum’、‘mean’、‘max’
|
|
einops_rearrange
rearrange 的作用是:重排张量维度和形状,相当于 reshape + transpose + unsqueeze + flatten 的组合。
|
|
- tensor:输入张量
- pattern:形状转换模式(字符串),写明你从什么变成什么
- 可选关键词参数:…、维度大小等(有时需要指定形状)
|
|
张量操作的计算成本 tensor_operations_flops
基本概念
浮点操作(FLOP)是指任何涉及浮点数的操作, 比如加法, 乘法, 等等
易混名词:
- FLOPs: 浮点运算次数, 用于衡量 计算量
- FLOP/s:每秒浮点运算数, 用于衡量硬件能力
直观理解
-
训练 GPT3 需要 3.14e23 FLOPs
-
训练 GPT4 需要 2e25 FLOPs
-
A100 峰值算力 312 tera FLOP/s == 312e12 FLOP/s
-
H100 峰值算力(稀疏) 1979 tera FLOP/s == 1979e12 FLOP/s
整体而言, 矩阵运算是运算量最大的部分
其中, 对 m x n , n x p 矩阵进行矩阵乘法, 运算量为 2 x m x n x p
Model FLOPs Utilization(模型 FLOPs 利用率)
简称 MFU
它衡量的是:
你训练模型时的实际 FLOPs 占理论最大 FLOPs 的比例
衡量模型是否吃满了算力,是工程和系统优化的关键指标
|
|
值的范围:
- 0%(啥都没干)
- 100%(理论极限利用)
- 一般以 50% 为界限, 超过则较优
低 MFU 说明:模型小、batch 小、数据加载慢、通信慢、未并行优化等
梯度基础 gradients_basics
计算量中, 还有一部分来自于梯度的计算
模型 Models
参数 parameters
pytorch 中, 参数被存储为 nn.parameter 对象
参数初始化 parameter initialization
为何初始化
在模型运算中, 矩阵乘法输出的数值规模会与隐藏维度的平方根成正比.
因此当模型很大时, 运算结果会很大, 导致梯度爆炸, 训练不稳定
我们需要采用某种方法, 避免这种情况
参数初始化
我们通过对参数进行缩放, 抵消运算带来的数值的放大, 避免过大的运算结果
我们在初始化后, 把所有参数缩放至原先的 1/sqrt(num_inputs) 倍, 用来抵消后续放大的影响
相关的比较成熟的研究, 可以见 Xavier initialization
自定义模型 custom_model
关于随机性 randomness
随机性在模型中时常被用到: 参数初始化, dropout, 数据排序……
为了便于复现, 最好在每次使用时指定随机种子
数据加载 data_loading
语言模型中, 经过 tokenization, 数据变成了一系列整型数字
数据通常很大, 无法一次性全部加载到内存中
可以使用 memmap, 建立数据到内存间的映射关系, 只把需要访问的数据加载到内存上
可以写一个 dataloader, 用于从所有数据中, 多次采样小批量的数据
优化器 optimizer
- momentum = SGD + 对梯度做指数加权平均
- 让更新方向更平滑,减少梯度震荡
- AdaGrad = SGD + 对梯度平方求累计平均(累积求和再开方)
- 每个参数都有自己的学习率缩放因子
- RMSProp = AdaGrad + 用指数加权平均
- 避免学习率快速衰减到 0
- Adam = RMSProp + Momentum
- 同时维护
- 一阶矩(梯度的指数加权平均) → 类似 Momentum
- 二阶矩(梯度平方的指数加权平均) → 类似 RMSProp
- 还加了偏差修正
训练循环 train_loop
检查点 checkpoint
训模型需要很长时间, 为了防止某时的崩溃导致前功尽弃
采用定时将模型保存到磁盘的方式, 具体保存的内容有: 模型, 优化器, 迭代次数
后续可以加载保存的检查点
我的问题: 为什么要保存优化器?
优化器里不仅有超参数,还存储了训练过程中的状态信息,这些状态会影响后续的梯度更新,如果不保存,就无法无缝恢复训练
混合精度训练 mixed_precision_training
这种训练方法最早在 2017 年被提出
正如之前提到的, 不同的精度类型有自己的优缺点
因此可以根据具体任务类型, 指定精度, 提升效率和效果
- bfloat16, fp8 用于前向传播(激活函数)
- float32 用于其他部分(参数, 梯度)
用低精度训练很难, 但是当训练完后把模型通过量化等方式转换为低精度很简单