CS224N Lecture 12: Efficient Neural Network Training
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于 Shikhar Murty 授课内容整理 |
| 来源 | Stanford Online |
| 日期 | 2024年5月 |
引言:高效训练神经网络的重要性
本节课的主题是高效神经网络训练(Efficient Neural Network Training),内容涵盖三大主题:(1)混合精度训练,(2)多GPU训练(DDP与FSDP),(3)参数高效微调(LoRA)。这些技术对于实际项目中的模型训练至关重要。
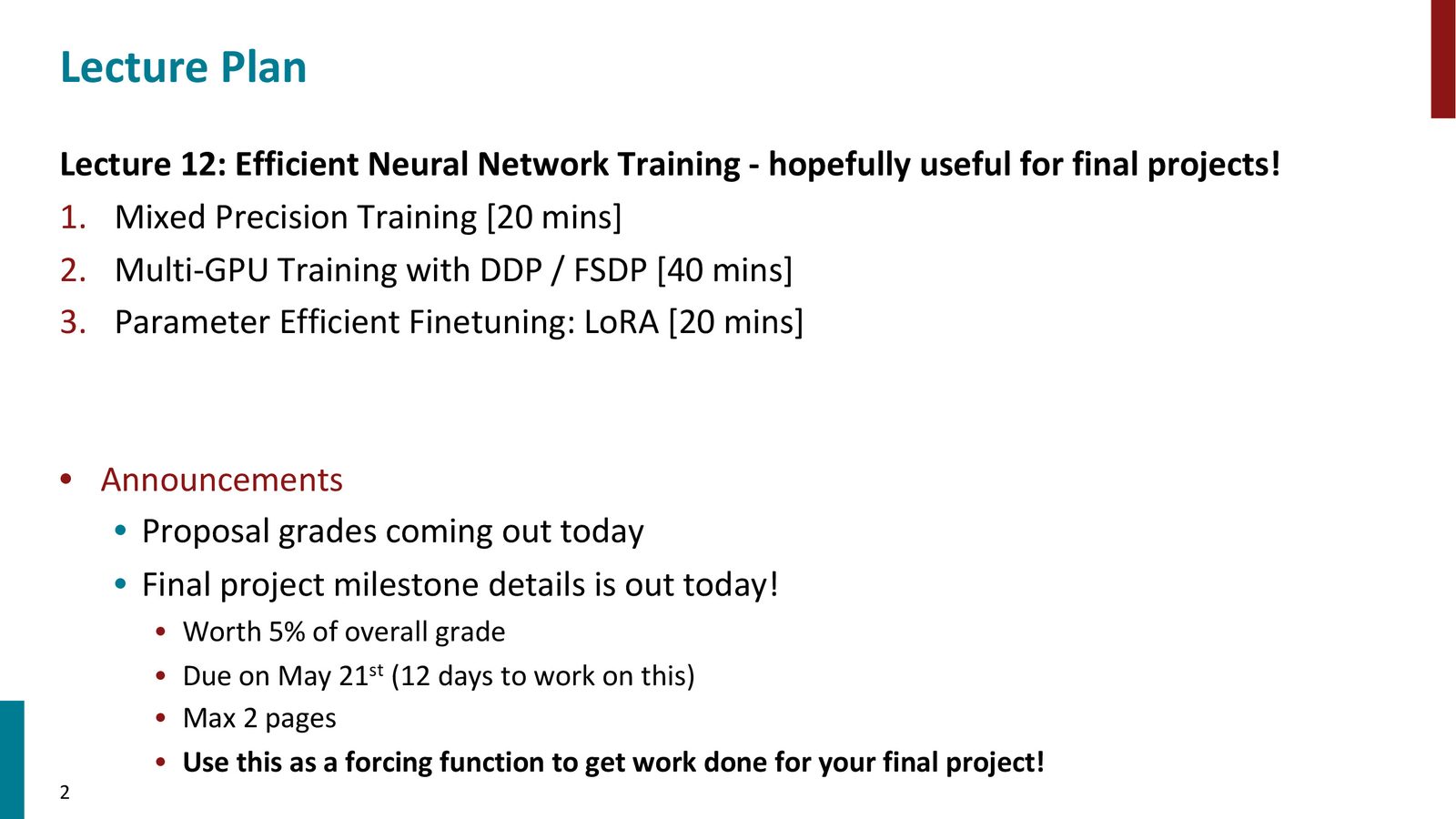
来源:Slides 第2页。
本课三大核心主题
- Mixed Precision Training(混合精度训练):用更少的比特表示参数和梯度,节省内存并加速计算
- Multi-GPU Training(多GPU训练):DDP 和 FSDP(ZeRO Stage 1--3)的原理与实践
- Parameter Efficient Finetuning(参数高效微调):LoRA 的核心思想与实现
到目前为止,CS224N 课程已经讲解了如何将词转化为向量、如何将句子转化为向量、Transformer 架构、预训练等内容。本节课转向一个不同但同样重要的方向——如何在 GPU 上高效地训练大型模型。虽然这些内容“与自然语言没有直接关系”,但对于最终项目(和实际工作)极其有用。
本章小结
高效训练技术是将理论模型落地到实际GPU硬件上的桥梁。混合精度训练节省内存和时间,多GPU训练突破单卡容量限制,参数高效微调让资源受限的研究者也能适配大模型。
浮点数表示基础
FP32:标准单精度浮点数
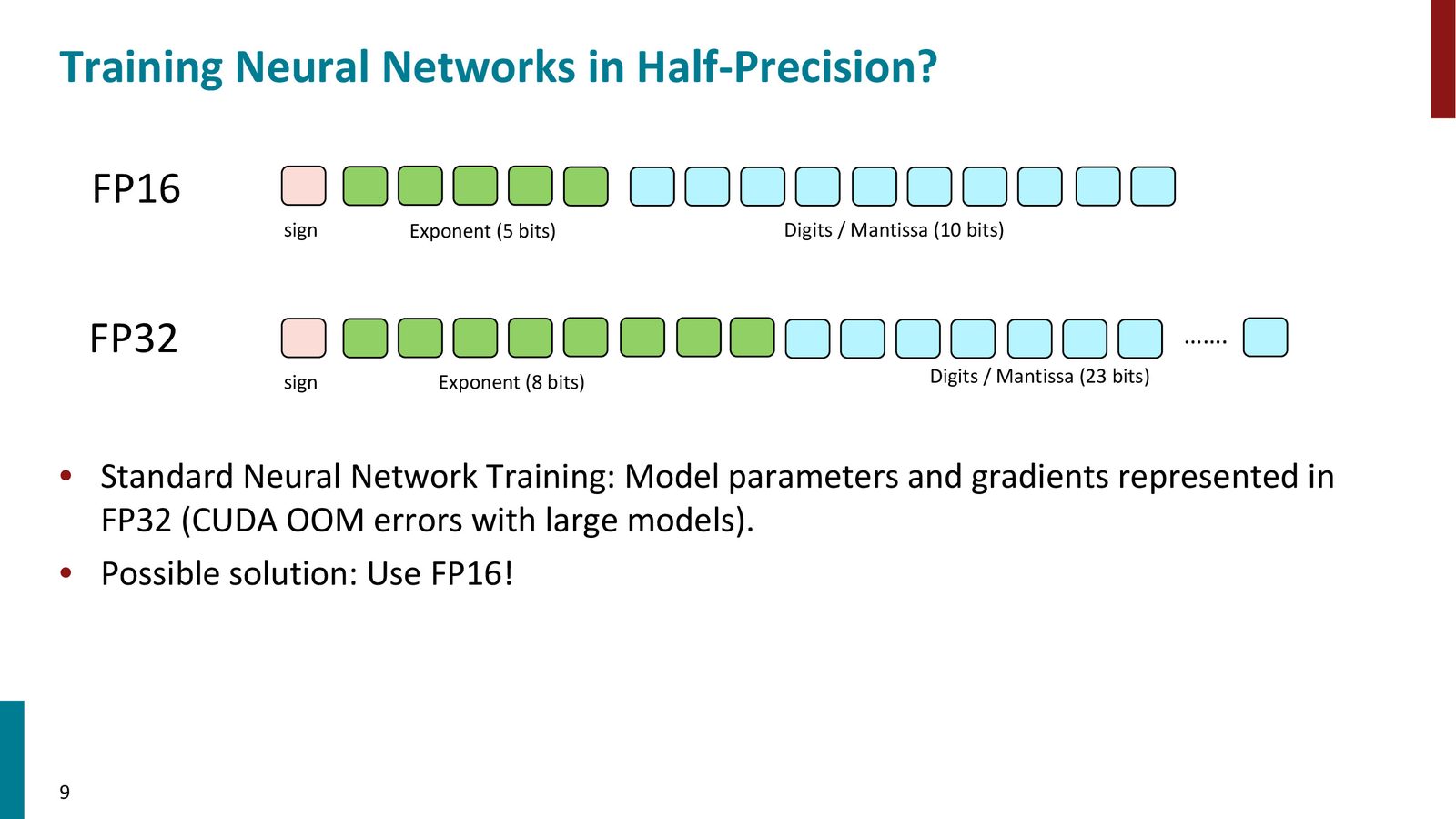
在深度学习中,模型参数和梯度通常以浮点数的形式存储在GPU显存中。FP32(32位浮点数)是最基本的数据类型,每个参数占用 4字节。
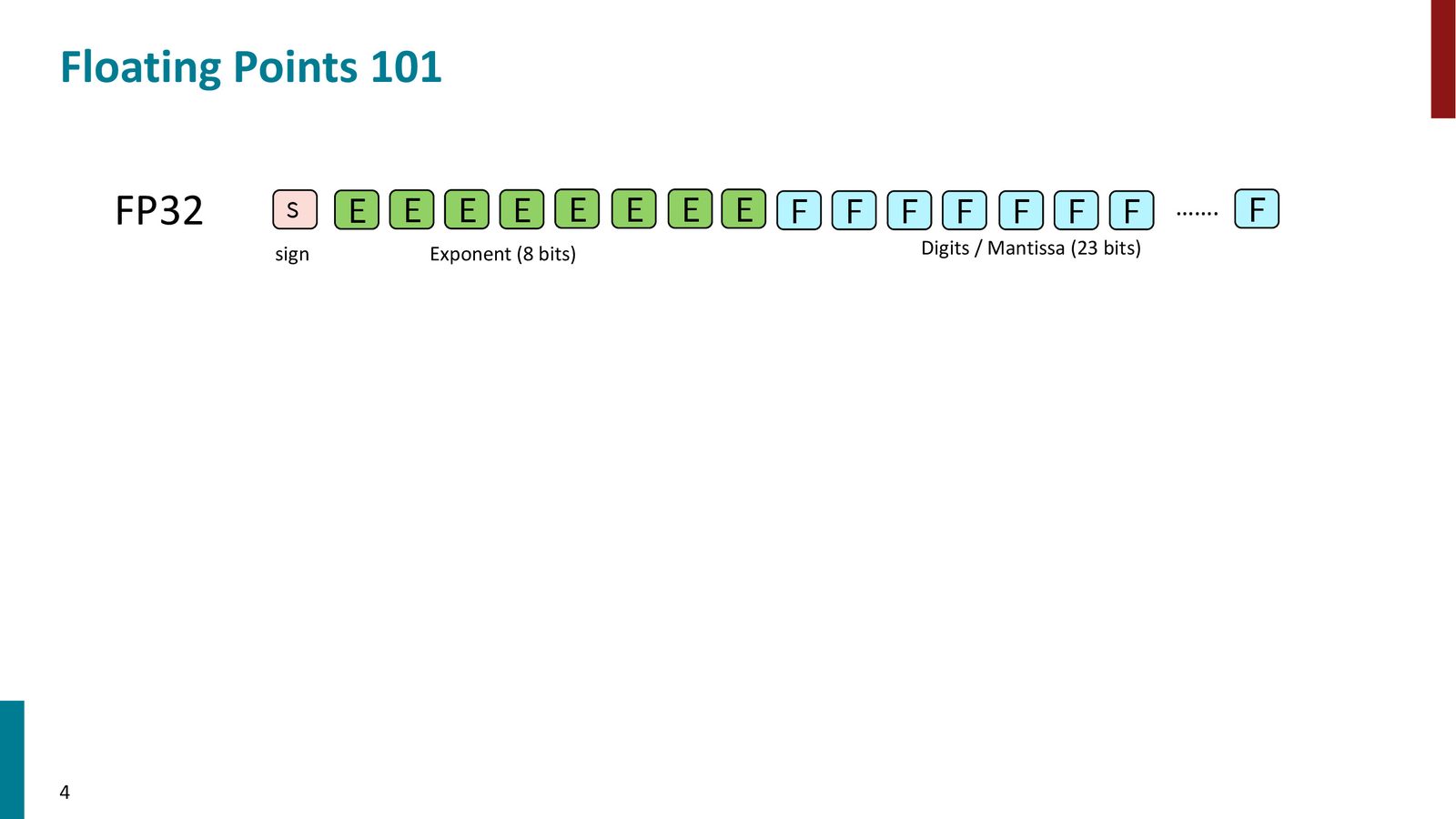
来源:Slides 第4页。
FP32 的数值由以下公式计算:
- \(B\):符号位(sign),决定正负
- \(E\):指数位(exponent,8位),决定动态范围——能表示多大或多小的数
- \(b_i\):尾数位(mantissa,23位),决定精度——数值的精确程度
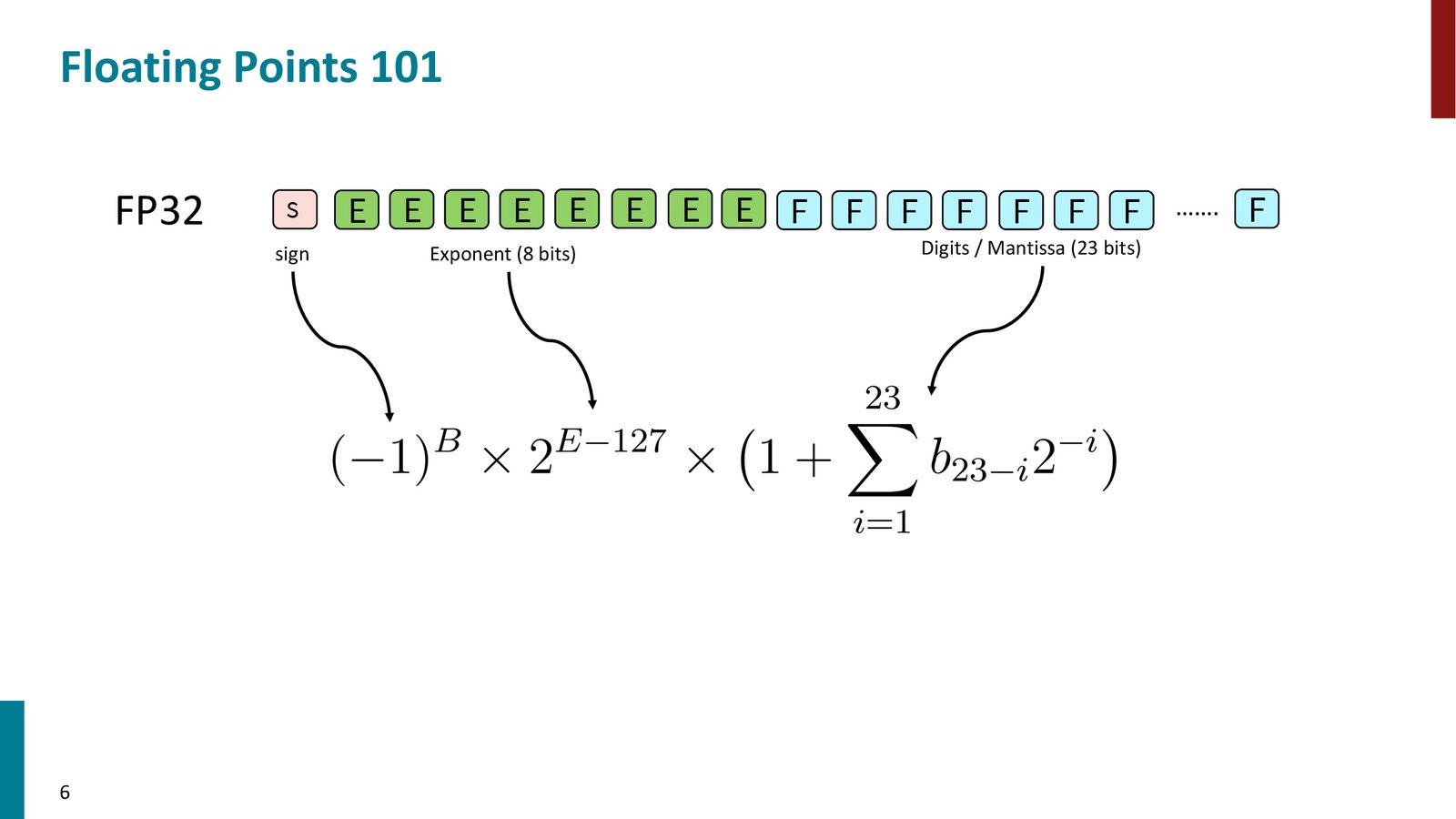
来源:Slides 第6页。
指数位与尾数位的权衡
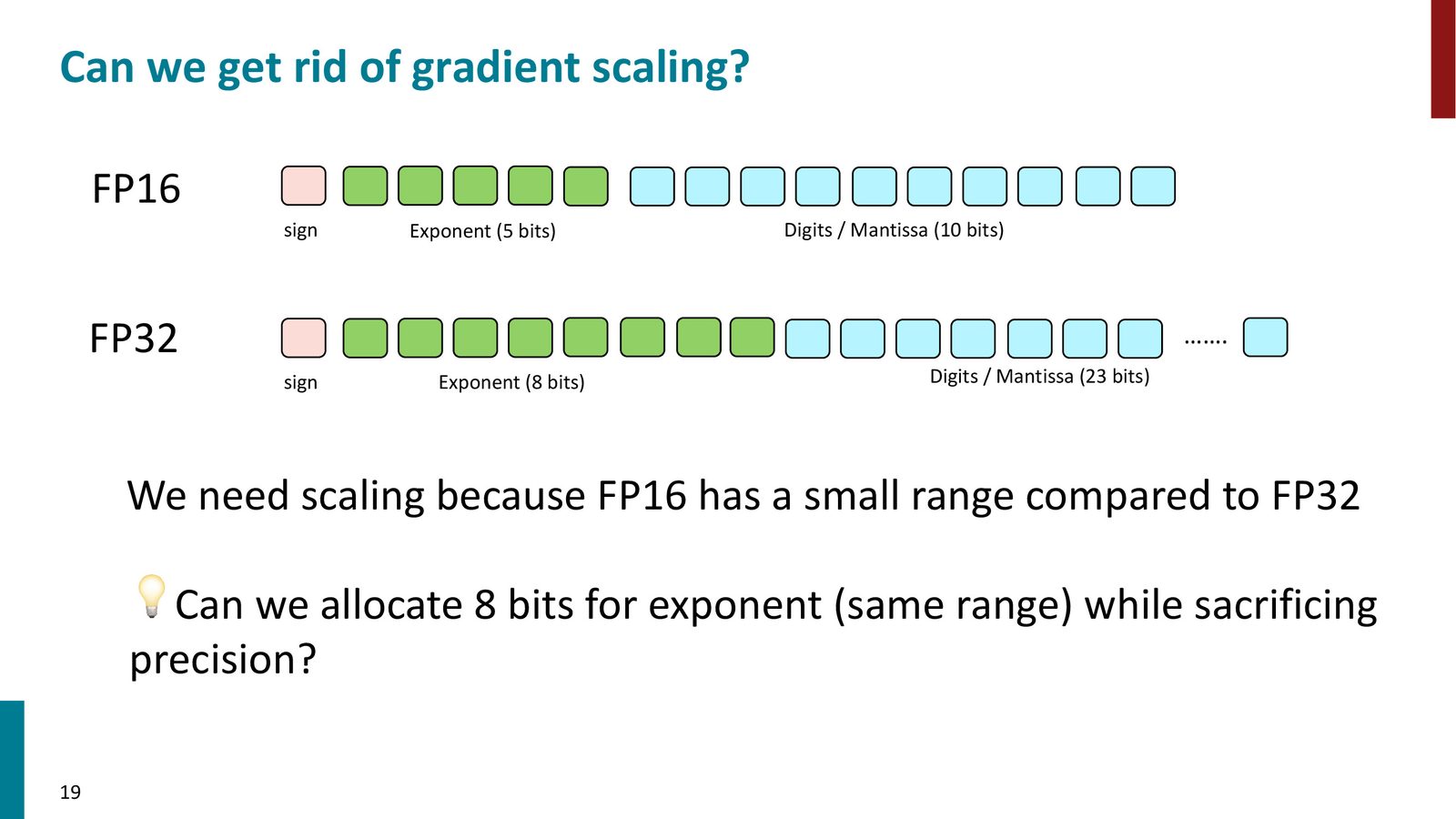
指数位越多,能表示的数的范围越大(更小的数和更大的数都能表示)。\ 尾数位越多,数值的精度越高(相邻可表示数之间的间隔更小)。\ 在总位数固定的前提下,指数位与尾数位之间存在权衡——这是理解FP16、BF16等格式的关键。
FP16:半精度浮点数
FP16 只有16位(2字节),内存需求是 FP32 的一半。其格式为:1位符号位 + 5位指数位 + 10位尾数位。
来源:Slides 第9页。
| 数据类型 | 总位数 | 指数位 | 尾数位 |
|---|---|---|---|
| FP32 | 32 | 8 | 23 |
| FP16 | 16 | 5 | 10 |
| BF16 | 16 | 8 | 7 |
FP16 的两个核心问题:
- 动态范围不足:指数位仅5位,导致非常小的数会被下溢为零(underflow)。例如,小于约 \(6 \times 10^{-5}\) 的数在 FP16 中直接变为0。
- 精度不足:尾数位仅10位,导致舍入误差。例如,1.0001 在 FP16 中会被舍入为 1.0。
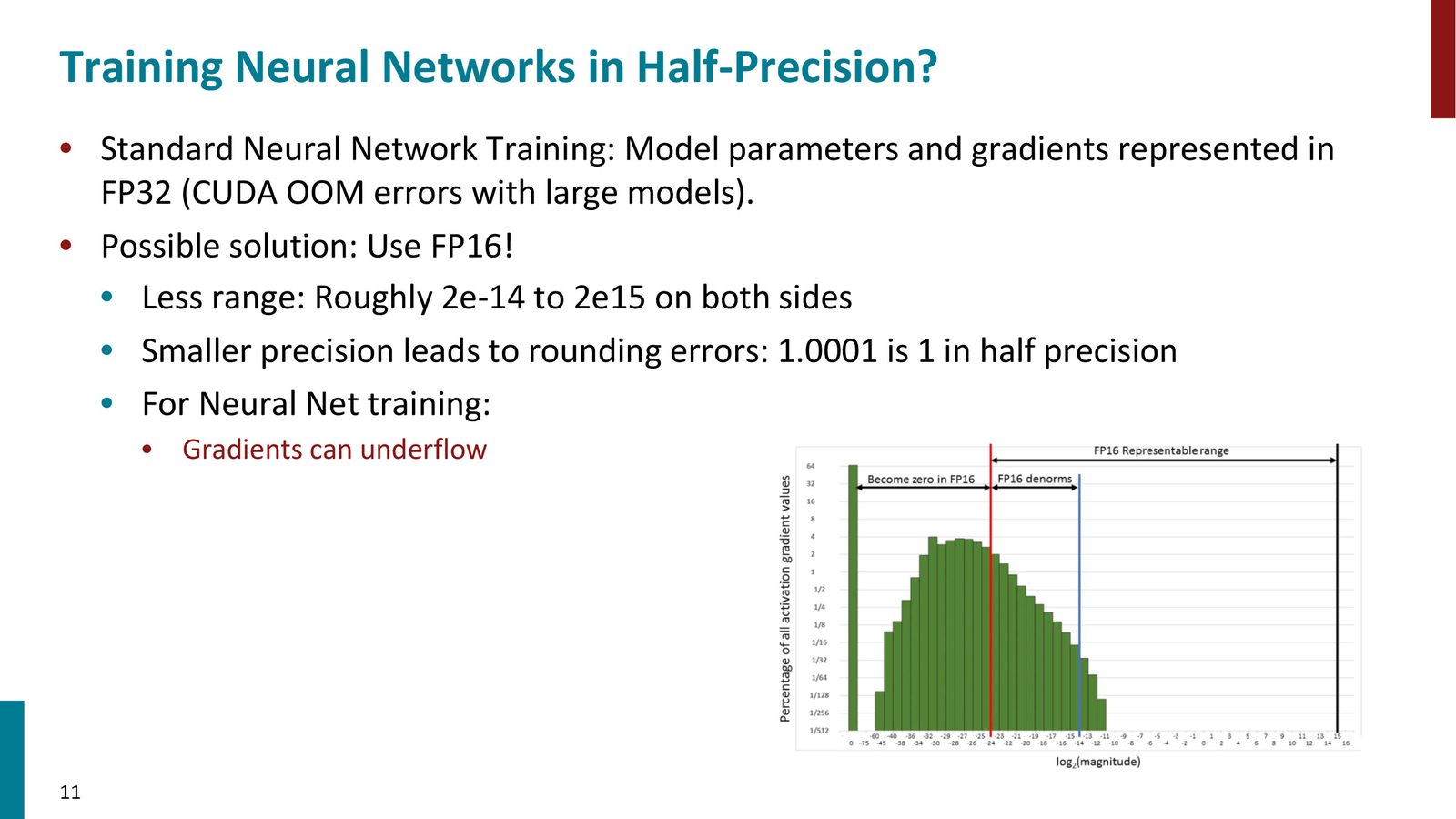
来源:Slides 第11页。图来自 NVIDIA 博客。
FP16 梯度下溢是致命问题
在神经网络训练中,梯度通常非常小。如果直接用 FP16 计算梯度,超过一半的梯度值会被四舍五入为零,导致模型无法有效学习。这就是为什么不能简单地将所有计算切换到 FP16。
本章小结
浮点数的位数分配(指数位 vs 尾数位)决定了动态范围和精度之间的权衡。FP32 是标准格式(4字节/参数),FP16 节省一半内存但存在严重的动态范围和精度问题。理解这些限制是混合精度训练的前提。
混合精度训练
初步方案:FP32 主权重 + FP16 计算
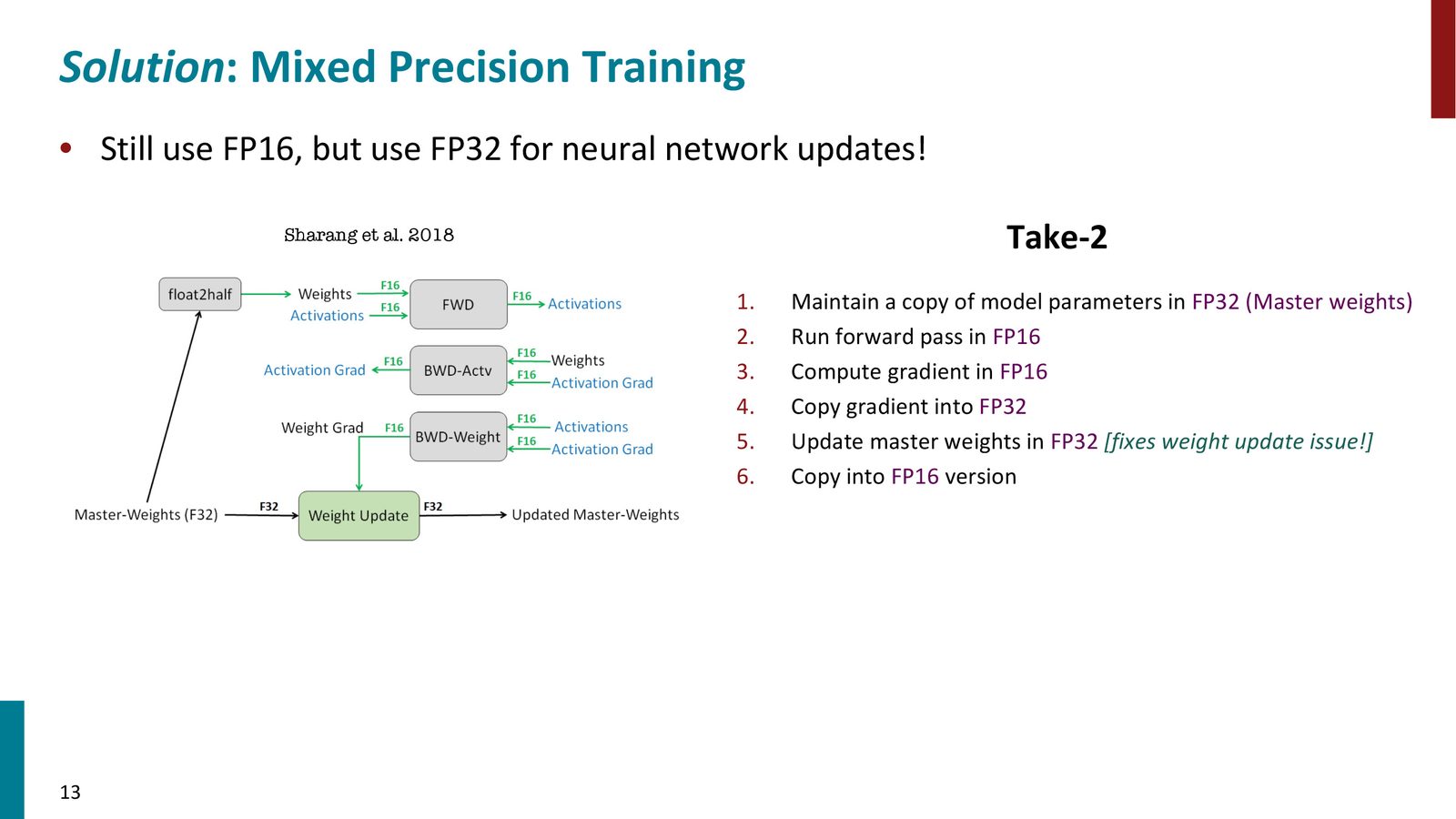
既然纯 FP16 有问题,一个自然的想法是:保留一份 FP32 的模型副本(Master Weights),但在前向和反向传播中使用 FP16 计算。
来源:Slides 第13页。
具体步骤:
- 维护 FP32 格式的模型参数副本(Master Weights)
- 将 Master Weights 转换为 FP16,执行前向传播
- 在 FP16 中计算梯度(反向传播)
- 将 FP16 梯度上转为 FP32
- 用 FP32 梯度更新 Master Weights
- 将更新后的 Master Weights 复制回 FP16 版本
梯度下溢问题仍未解决
虽然权重更新的精度问题通过 FP32 Master Weights 解决了,但反向传播中计算的梯度本身仍然是 FP16 的。那些极小的梯度值仍然会在 FP16 中下溢为零,丢失重要的学习信号。
Loss Scaling:解决梯度下溢
为了避免 FP16 下的梯度下溢,引入 Loss Scaling 技巧:在计算梯度之前,将损失函数乘以一个较大的常数(如1000),使得梯度也被等比放大。放大后的梯度值更大,不容易下溢为零。在 FP32 中更新权重之前,再将梯度除以该常数。
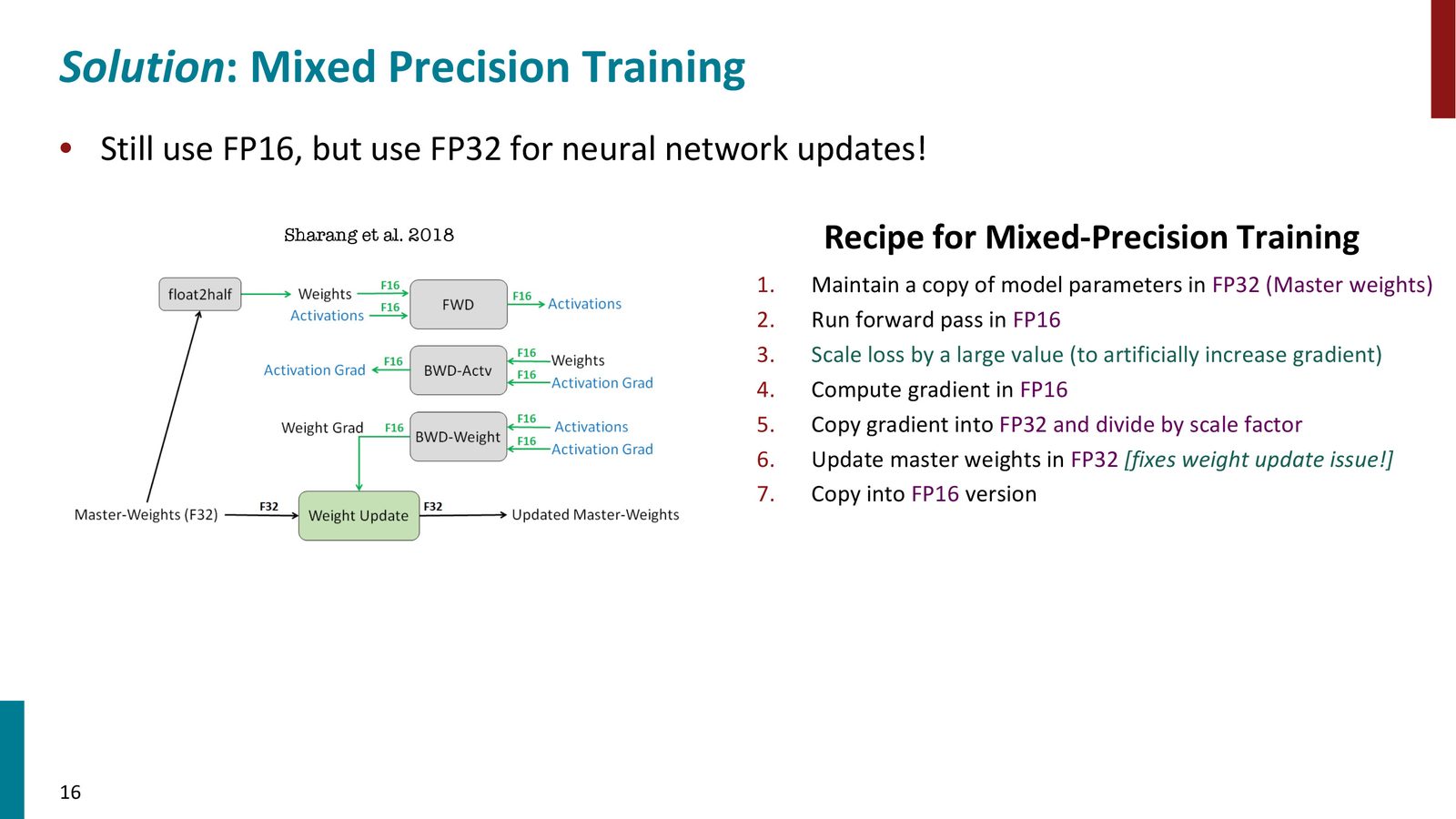
来源:Slides 第16页。
混合精度训练完整方案(FP16 + Loss Scaling)
- 维护 FP32 格式的 Master Weights
- 在 FP16 中执行前向传播
- 将损失乘以一个大常数(Loss Scaling),人为放大梯度
- 在 FP16 中计算梯度(此时梯度已被放大,不容易下溢)
- 将梯度转为 FP32 后除以 Scaling Factor
- 用 FP32 更新 Master Weights
- 复制回 FP16 版本
在 PyTorch 中,使用 torch.cuda.amp.GradScaler 和 torch.cuda.amp.autocast 可以方便地实现此方案:
scaler = torch.cuda.amp.GradScaler()
for input, target in data:
optimizer.zero_grad()
with torch.cuda.amp.autocast():
output = model(input)
loss = loss_fn(output, target)
scaler.scale(loss).backward()
scaler.step(optimizer)
scaler.update()
Loss Scaling 的局限性
Loss Scaling 的常数需要精心选择:太小则梯度仍然下溢,太大则梯度上溢为 NaN。GradScaler 通过动态调整 Scaling Factor 来应对不同训练阶段的梯度分布变化,但这增加了训练的复杂性。
BFloat16:更优雅的解决方案
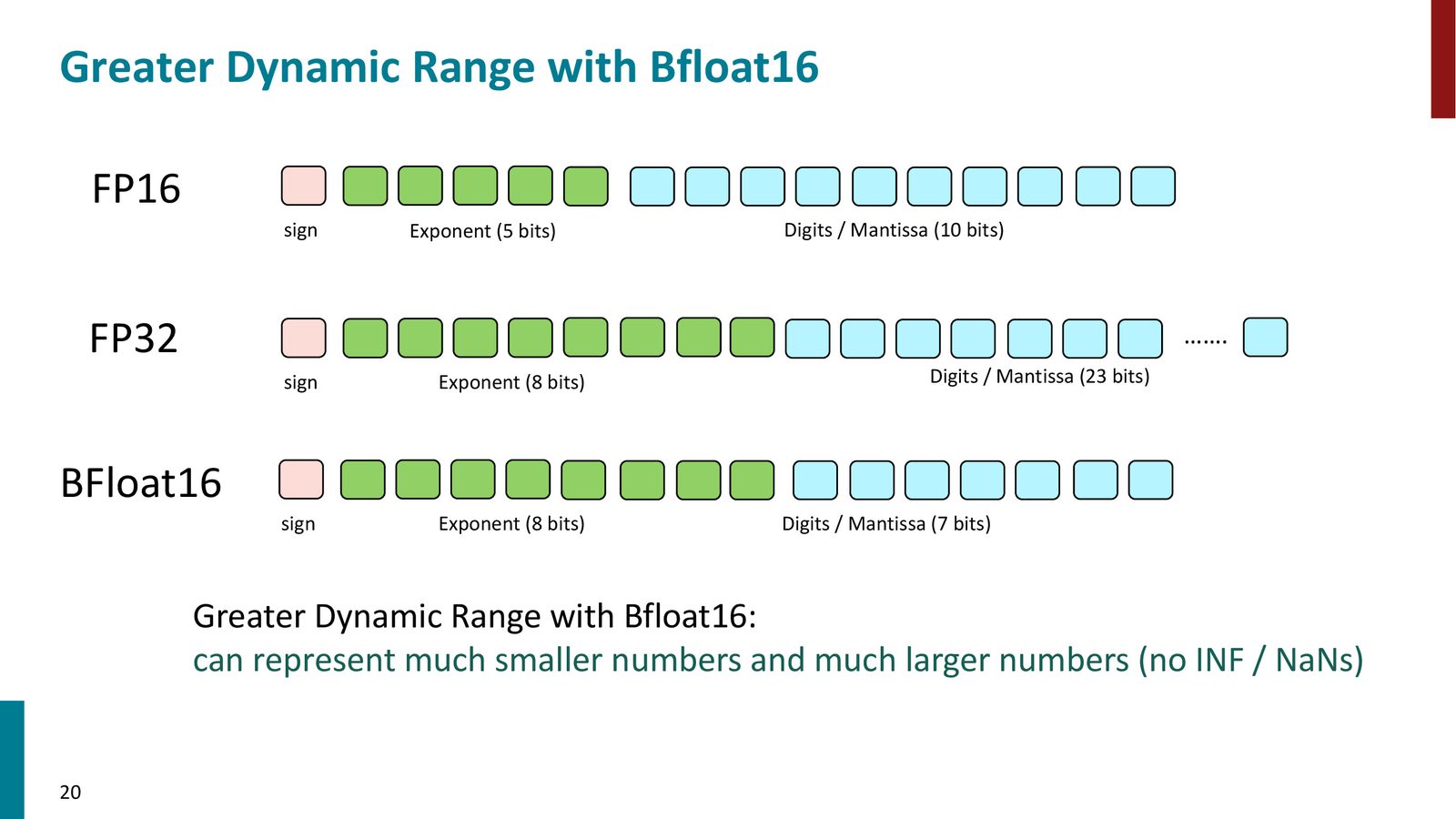
Loss Scaling 的根本原因是 FP16 的动态范围不足(仅5位指数)。BFloat16(Brain Float 16,由 Google Brain 提出)提供了一个更根本的解决方案:
来源:Slides 第19页。
BF16 的设计理念:
- 8位指数:与 FP32 完全相同的动态范围,彻底消除下溢问题
- 7位尾数:精度比 FP16(10位)更低,但实验表明对神经网络训练影响极小
- 无需 Loss Scaling:因为动态范围足够,不再需要人为放大梯度
来源:Slides 第20页。
使用 BF16 的代码极其简洁:
# Creates model and optimizer in default precision
model = Net().cuda()
optimizer = optim.SGD(model.parameters(), ...)
for input, target in data:
optimizer.zero_grad()
# Enables autocasting for the forward pass
with torch.autocast(device_type="cuda"):
output = model(input)
loss = loss_fn(output, target)
# No GradScaler needed!
loss.backward()
optimizer.step()
BF16 是当前最佳实践
如果你的 GPU 支持 BF16(Ampere 架构及更新:A100、H100、A6000 等),始终使用 BF16 而非 FP16。BF16 无需 Loss Scaling,代码更简洁,训练更稳定。可通过 torch.cuda.is_bf16_supported() 检查支持情况。
混合精度训练的实际效果
以在单块 A100 上微调 DistilBERT 进行情感分类为例:
| 数据类型 | 训练时间 | 准确率 | 显存占用 |
|---|---|---|---|
| Float64 | \(≈\)25 min | 高 | 最大 |
| Float32 | 基准 | 基准 | 基准 |
| Mixed (BF16) | 减少约1/3 | 略有提升 | 显著减少 |
BF16 混合精度训练不仅节省了约 1/3 的训练时间和大量显存,准确率甚至略有提升——这是因为低精度表示具有一定的正则化效果。训练加速的根本原因是:半精度矩阵乘法在现代 GPU 的 Tensor Core 上速度更快。
本章小结
- FP16 节省内存但存在梯度下溢和精度问题,需要 Loss Scaling
- BF16 保留 FP32 的动态范围,牺牲精度,无需 Loss Scaling
- 混合精度训练应始终启用:几乎不影响模型质量,显著节省时间和内存
- 新架构 GPU 优先使用 BF16,旧架构使用 FP16 + GradScaler
多GPU训练:DDP 与 ZeRO
GPU 显存占用分析
在讨论多GPU训练之前,需要理解单GPU上的显存都用在了哪里。以混合精度训练为例,每个参数的显存开销为:
来源:Slides 第25页。
| 组件 | 精度 | 每参数字节数 |
|---|---|---|
| 模型参数 | FP16 | 2 |
| 梯度 | FP16 | 2 |
| Master Weights(FP32 副本) | FP32 | 4 |
| Adam 动量(momentum) | FP32 | 4 |
| Adam 方差(variance) | FP32 | 4 |
| 合计 | 16 |
优化器状态的显存开销
很多人第一次了解到优化器也需要大量显存时会感到惊讶。使用 Adam 优化器时,每个参数需要额外存储动量(momentum)和方差(variance),各占 4 字节(FP32)。加上 FP32 Master Weights,仅优化器状态就需要 12字节/参数——是模型参数本身(2字节)的 6 倍!
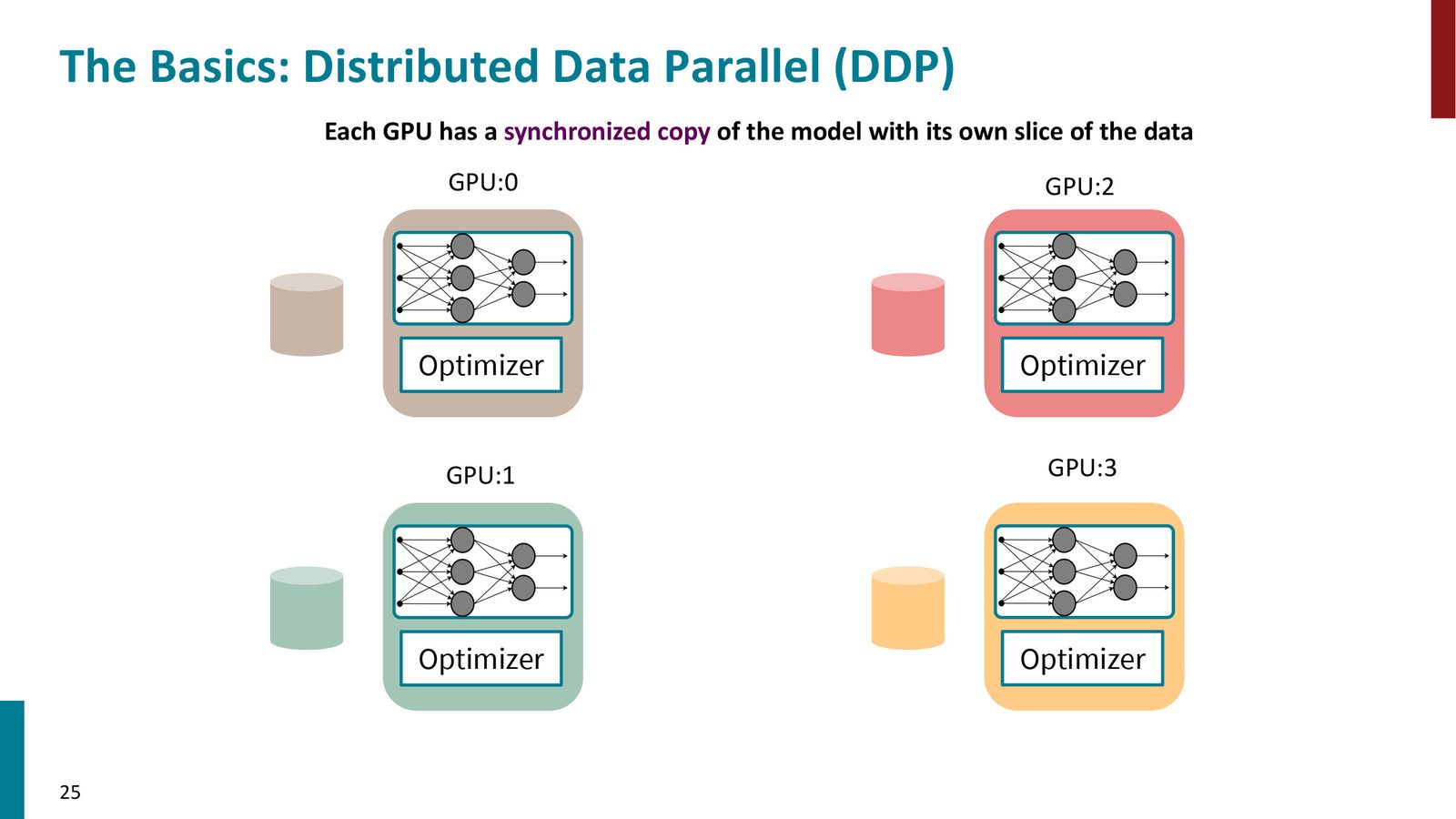
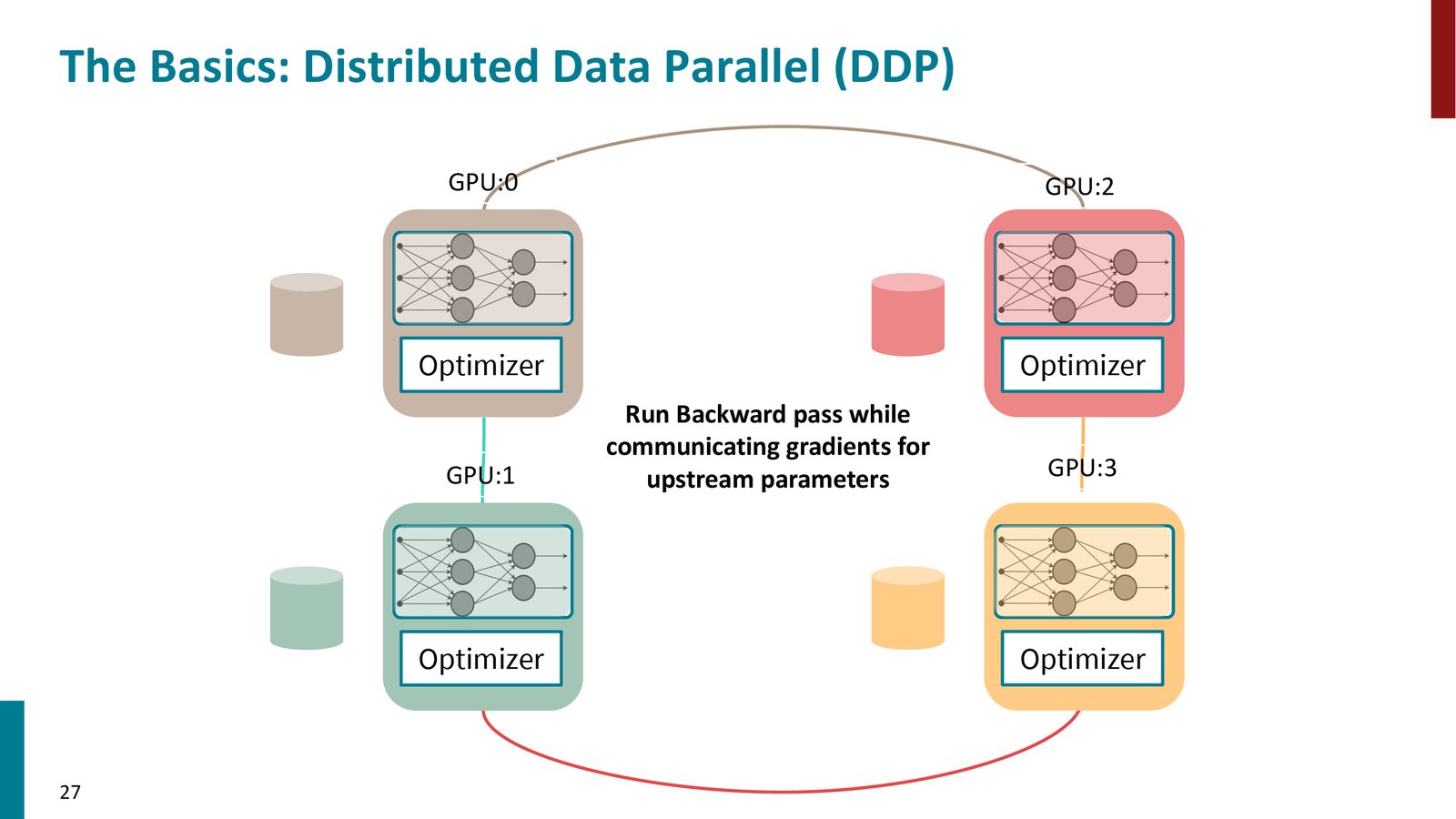
分布式数据并行(DDP)
Distributed Data Parallel (DDP) 是最基本的多GPU训练策略。
来源:Slides 第26页。
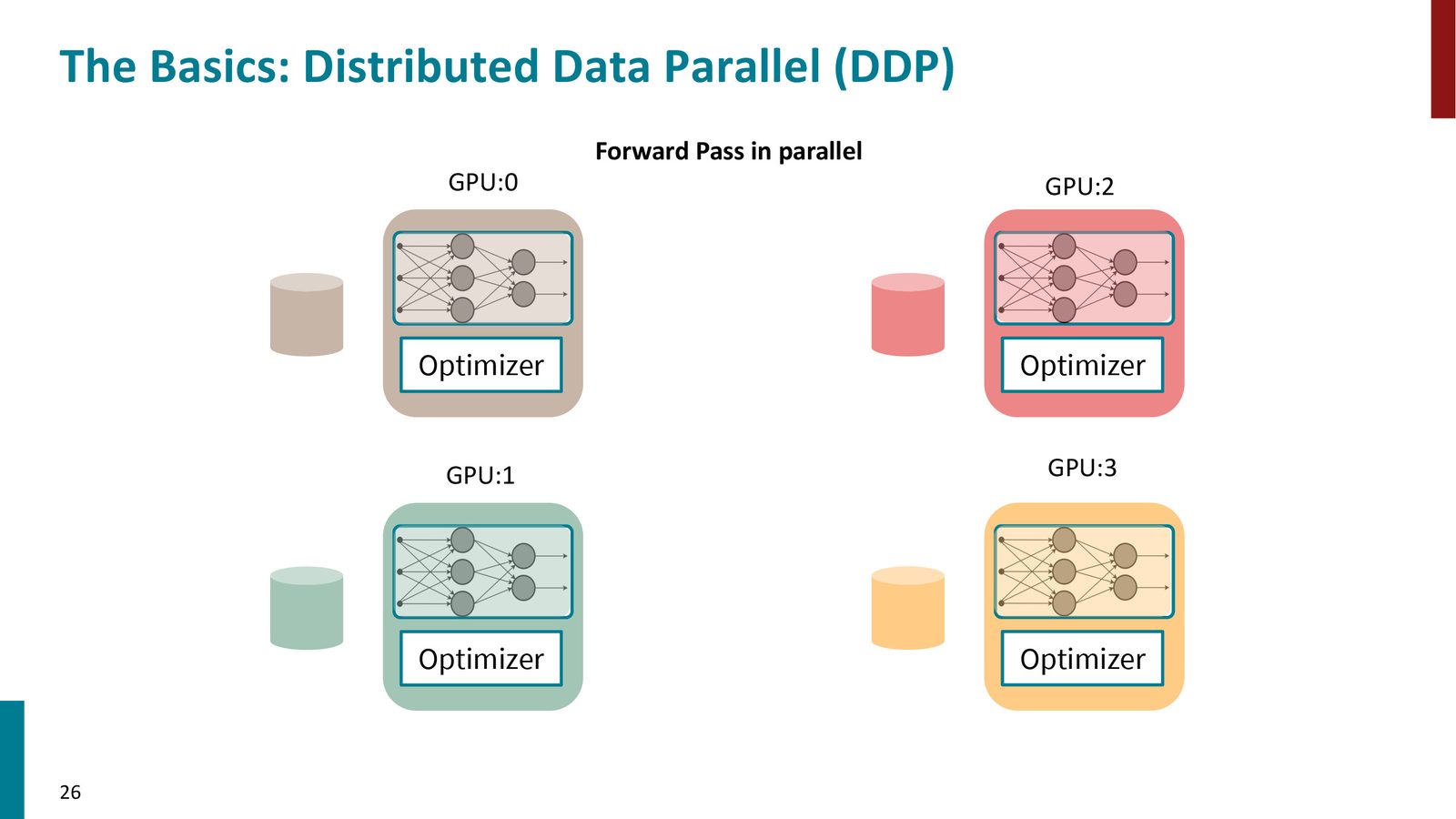
DDP 的工作流程:
- 将数据集均匀分割到 \(N\) 个 GPU 上(每个 GPU 处理 \(1/N\) 的数据)
- 每个 GPU 维护完整的模型副本和优化器状态
- 每个 GPU 独立执行前向传播和反向传播,得到各自的梯度
- 通过 All-Reduce 操作同步梯度:汇总所有 GPU 的梯度并分发给所有 GPU
- 每个 GPU 用汇总后的梯度更新自己的模型,保持同步
来源:Slides 第27页。
All-Reduce:DDP 的核心原语
All-Reduce 是一个 MPI(消息传递接口)原语,它将所有 GPU 上的数据进行归约(如求和),然后将结果广播到每个 GPU。在 DDP 中,All-Reduce 用于汇总梯度。通信开销为每参数 2 字节(FP16 梯度)。
DDP 的内存问题
DDP 虽然简单有效,但存在严重的内存冗余问题:
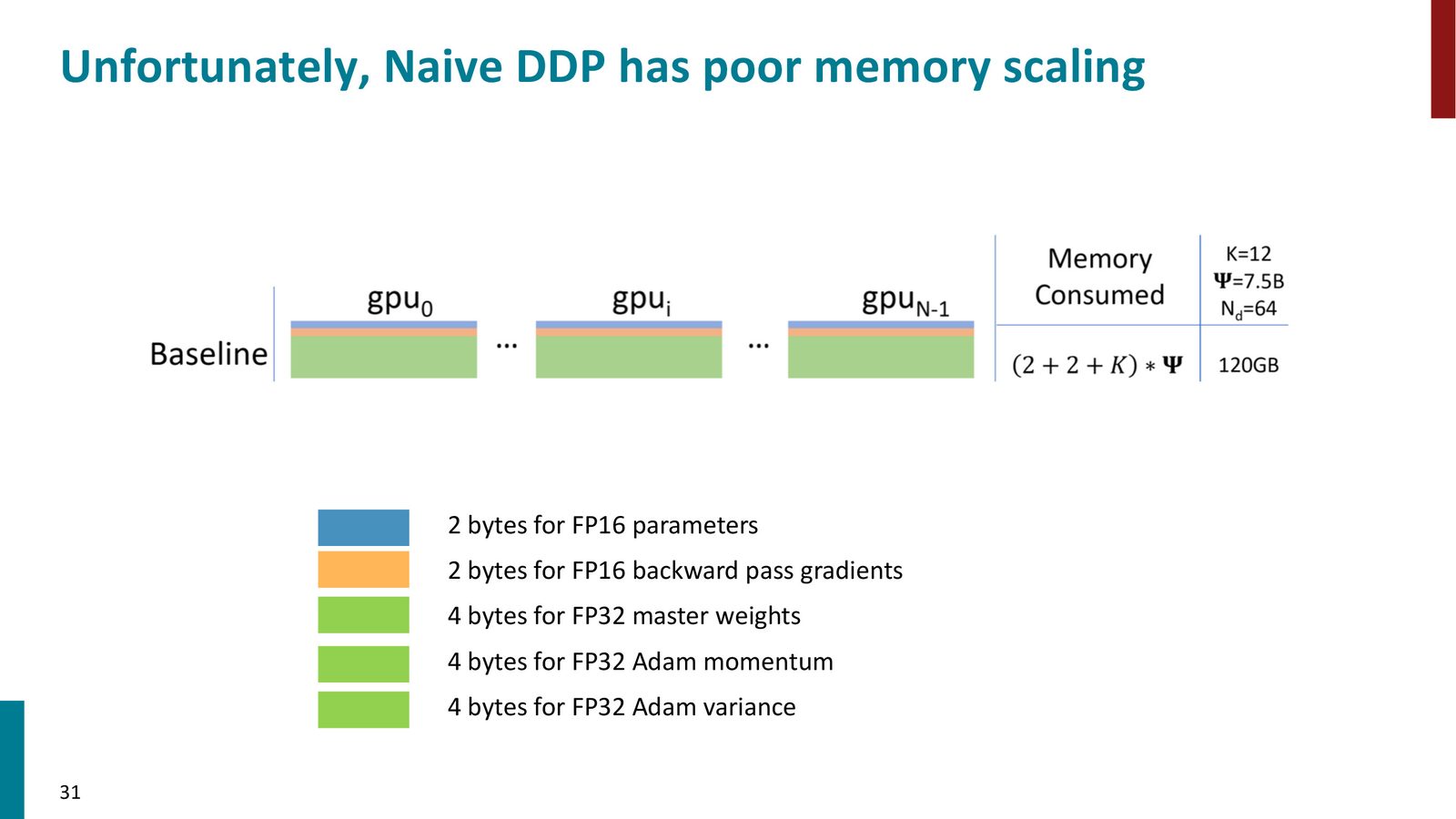
来源:Slides 第31页。
以一个 7.5B 参数的模型(\(\Psi = 7.5\text{B}\))为例,使用 Adam + 混合精度:
其中 \(K = 12\)(FP32 Master Weights 4B + Adam momentum 4B + Adam variance 4B)。A100 有 80GB 显存,连一块卡都放不下。而且,每个 GPU 上的优化器状态完全相同——这是巨大的浪费。
DDP 无法解决大模型问题
DDP 不减少任何单GPU的显存占用——它只是通过数据并行来加速训练。如果单个GPU放不下模型+优化器状态,DDP 无能为力。我们需要更聪明的策略来分摊显存开销。
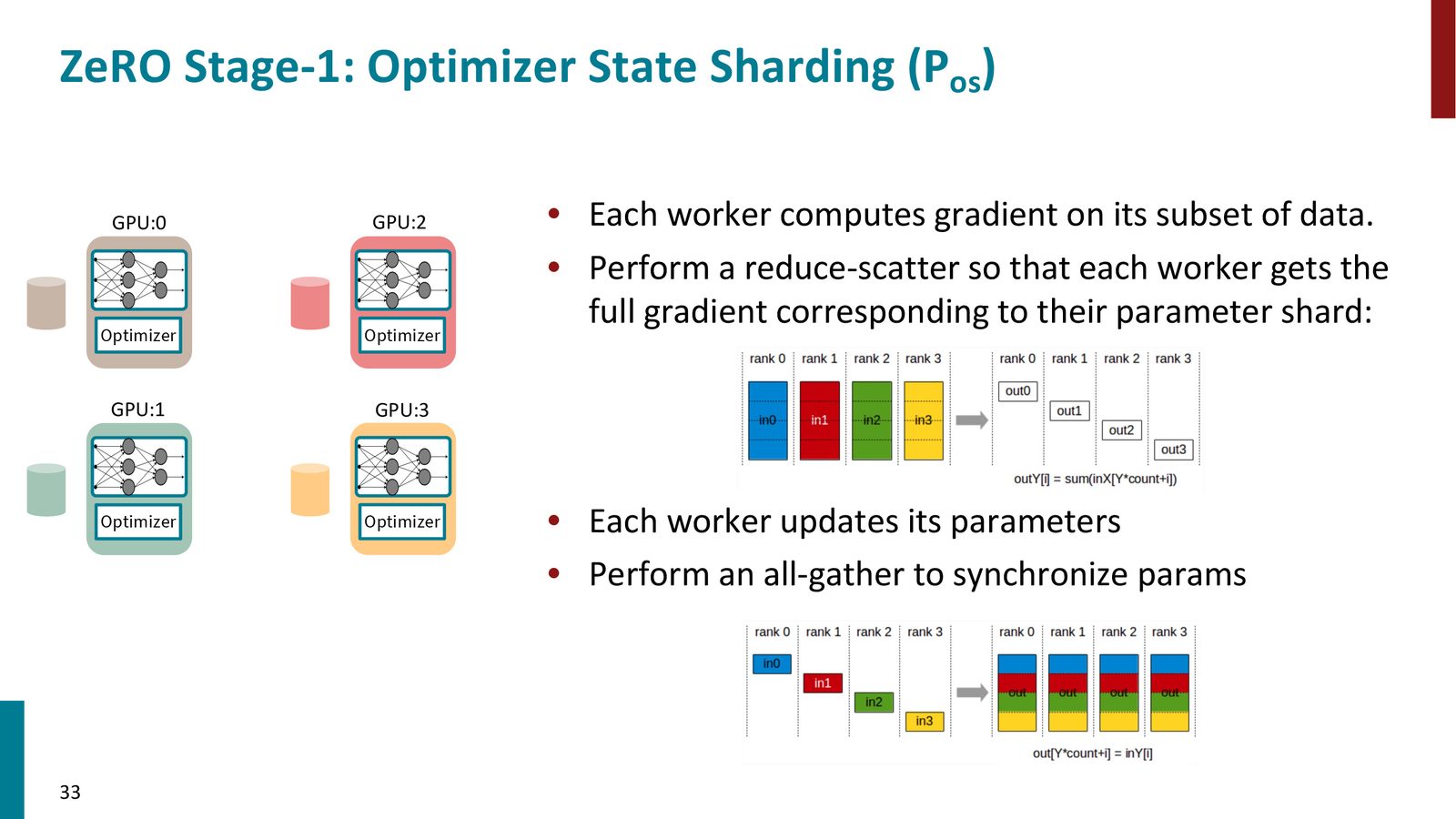
ZeRO Stage 1:分片优化器状态
ZeRO(Zero Redundancy Optimizer)由微软 DeepSpeed 项目提出,核心思想是将冗余的状态分片(shard)存储到不同 GPU 上。
ZeRO Stage 1 只分片优化器状态(绿色部分):
来源:Slides 第33页。
Stage 1 的工作流程:
- 每个 GPU 持有完整的模型参数(FP16)和完整的梯度
- 但只持有 \(1/N\) 的优化器状态
- 反向传播后,通过 Reduce-Scatter 操作,每个 GPU 只接收自己负责的参数分片的汇总梯度
- 每个 GPU 用本地优化器状态更新自己负责的参数分片
- 通过 All-Gather 操作,收集所有 GPU 更新后的参数,恢复完整模型
ZeRO Stage 1 是免费的午餐
关键洞察:All-Reduce = Reduce-Scatter + All-Gather。DDP 需要执行一次 All-Reduce,而 ZeRO Stage 1 执行 Reduce-Scatter + All-Gather,通信量完全相同。因此,ZeRO Stage 1 在不增加任何通信开销的情况下节省了优化器状态的显存——你应该始终使用它。
三个 MPI 原语
- All-Reduce:所有 GPU 的数据归约后广播到所有 GPU(用于 DDP)
- Reduce-Scatter:所有 GPU 的数据归约后,结果的不同分片散发到不同 GPU
- All-Gather:收集所有 GPU 的分片,拼接成完整数据广播到所有 GPU
核心恒等式:All-Reduce \(\equiv\) Reduce-Scatter + All-Gather
ZeRO Stage 2:分片梯度
Stage 2 在 Stage 1 的基础上,进一步分片梯度。
核心技巧:永远不实例化完整的梯度向量。反向传播是逐层进行的——当计算完第 \(j\) 层的梯度后,立即通过 Reduce 操作将该层梯度发送给负责该层的 GPU,然后释放本地的临时梯度内存。
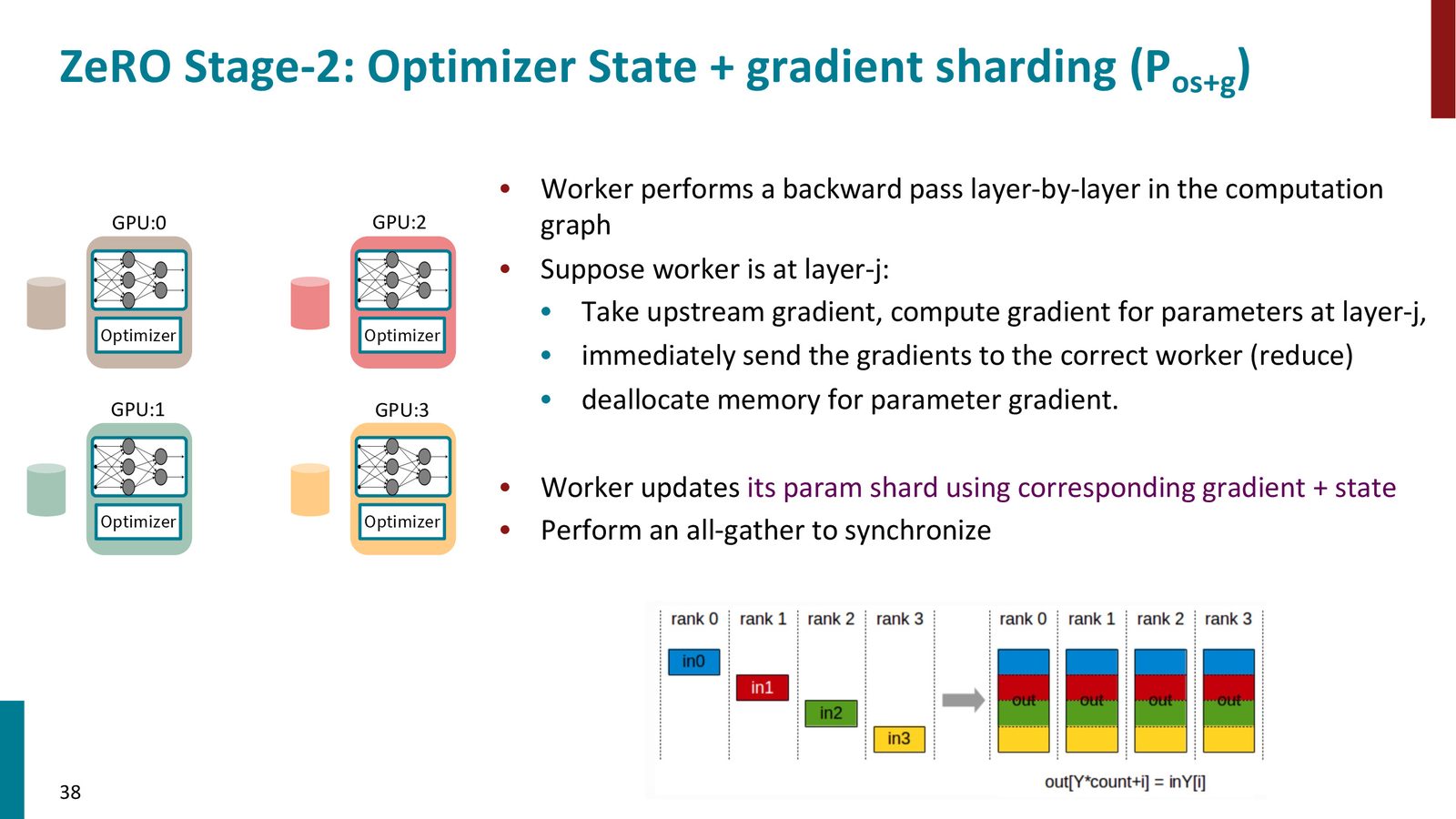
来源:Slides 第38页。
Stage 2 的通信量也与 DDP 相当(Reduce + All-Gather \(\approx\) All-Reduce),因此也是基本免费的显存优化。
ZeRO Stage 1 和 2 应始终启用
ZeRO Stage 1(分片优化器状态)和 Stage 2(分片梯度)都不增加显著的通信开销,却能大幅减少每GPU的显存占用。在多GPU训练中,没有理由不使用它们。
ZeRO Stage 3 / FSDP:分片模型参数
当模型大到连参数本身都放不进单个 GPU 时,就需要 ZeRO Stage 3,也称为 FSDP(Fully Sharded Data Parallel)。
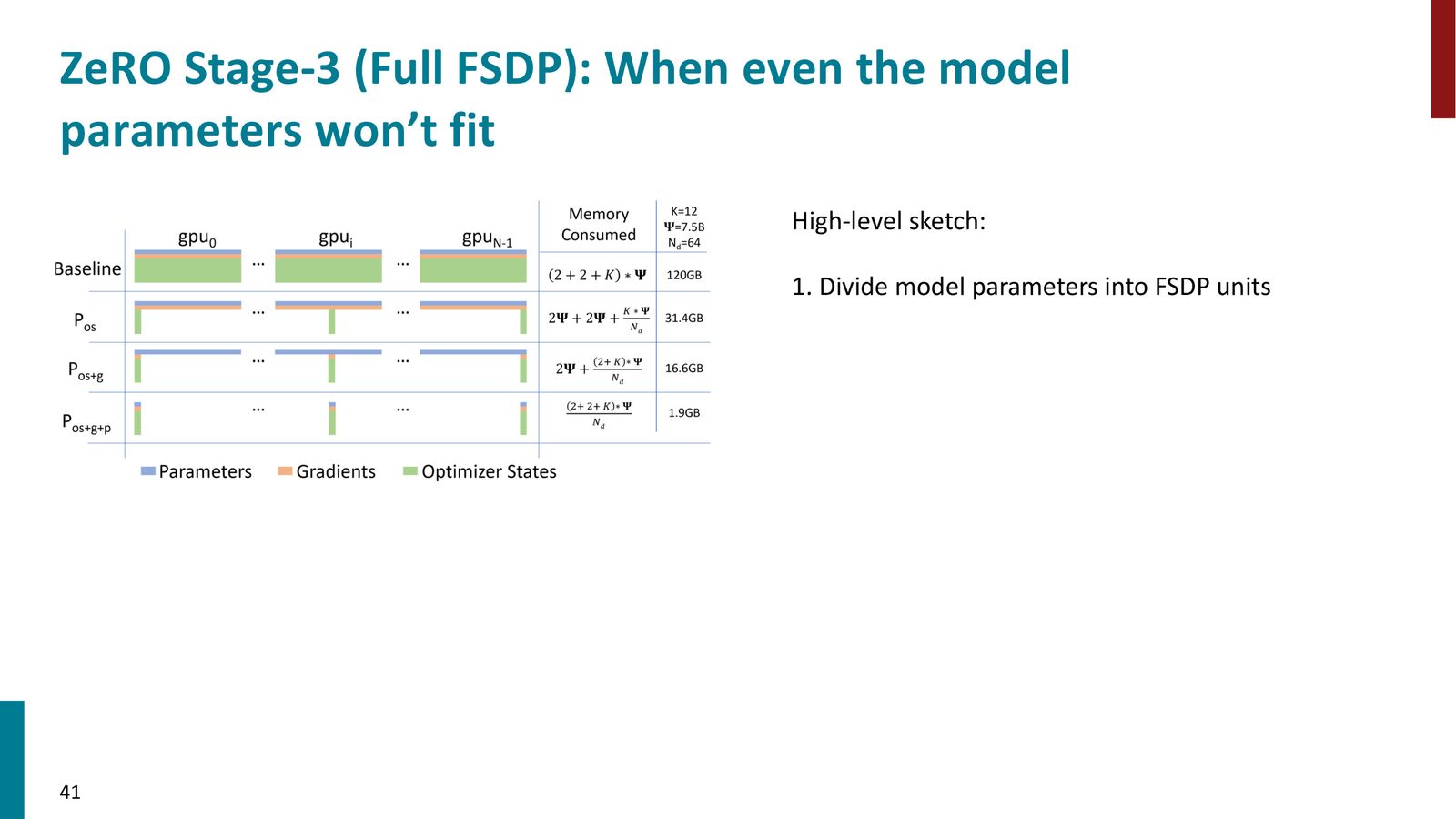
来源:Slides 第41页。
Stage 3 连模型参数也进行分片:
- 将模型划分为多个 FSDP 单元
- 将每个单元的参数展平(Flat Parameter),分配到不同 GPU
- 前向传播时:在计算某层之前,通过 All-Gather 临时收集该层的完整参数;计算完成后丢弃非本地分片
- 反向传播时:再次 All-Gather 获取完整参数,计算梯度后通过 Reduce-Scatter 分发梯度
- 每个 GPU 用本地优化器状态更新本地参数分片
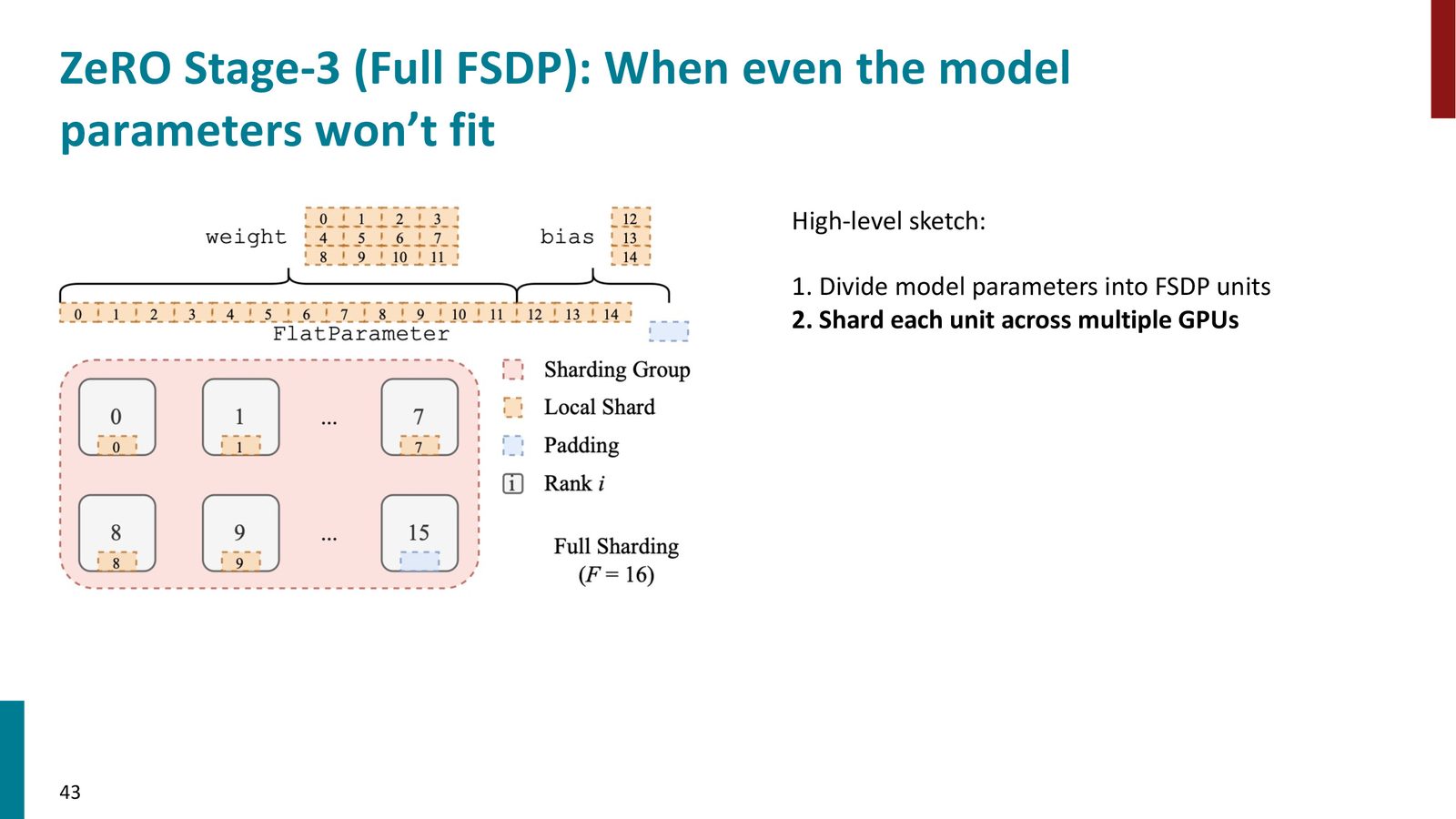
来源:Slides 第43页。
Stage 3 有额外的通信开销
与 Stage 1/2 不同,Stage 3 需要在前向传播和反向传播中都执行 All-Gather(分别收集参数),加上反向传播中的 Reduce-Scatter。总通信量为 2次 All-Gather + 1次 Reduce-Scatter,显著高于 DDP。但如果模型放不进单个 GPU,这是唯一的选择。
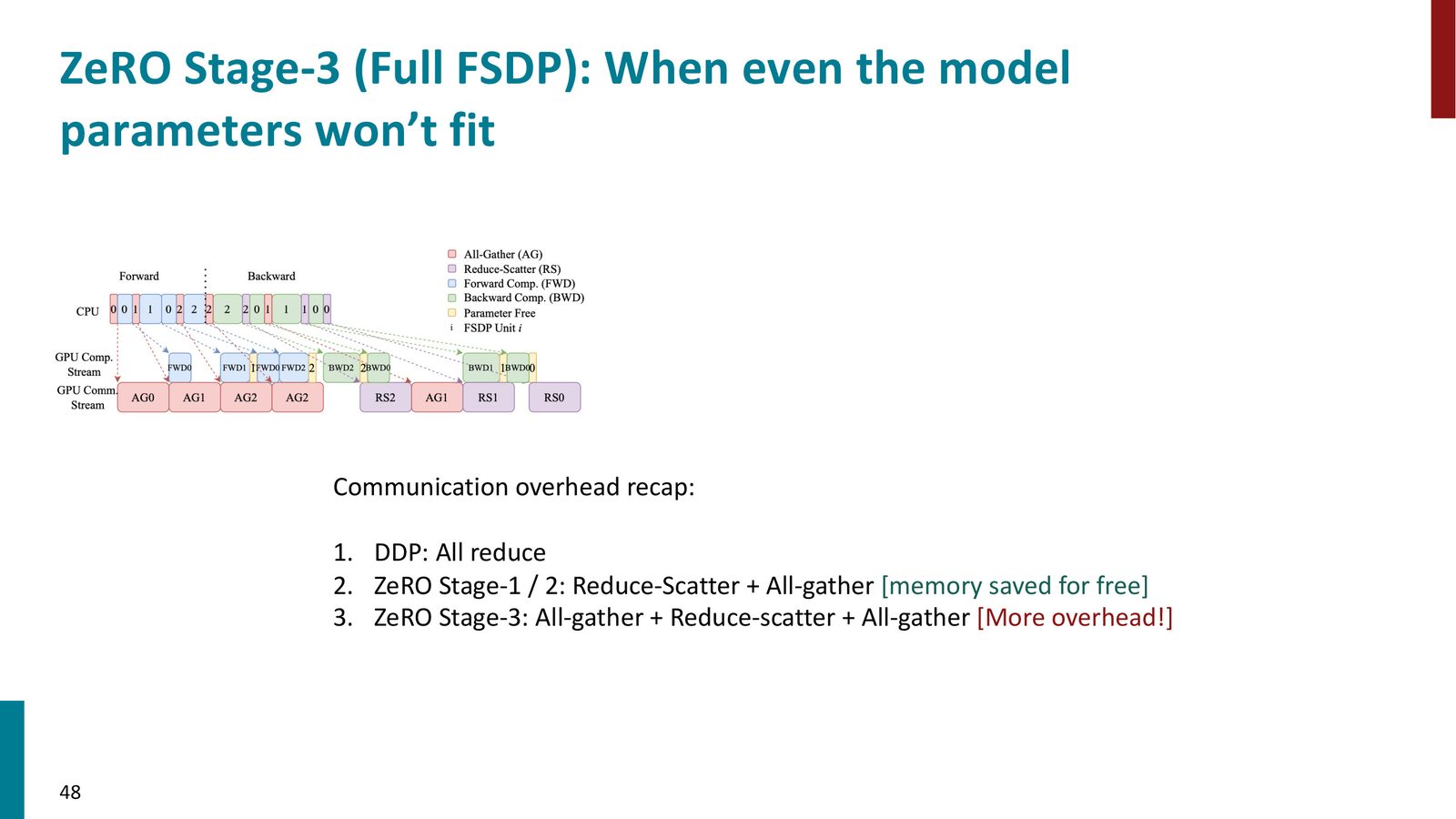
来源:Slides 第48页。
好消息是:当模型足够大时,前向传播一层的计算时间足以预取(prefetch)下一层的参数。PyTorch 的 FSDP 默认启用这种计算-通信重叠,使得通信开销在实际中被大幅隐藏。
GPU 显存中被忽视的部分:模型激活值
在前面的分析中,我们忽略了一个重要的显存占用来源:模型激活值(Activations)。
来源:Slides 第50页。
反向传播需要保存前向传播中每一层的激活值,其显存占用与 batch size 线性相关。这解释了为什么增大 batch size 时容易遇到 OOM 错误。ZeRO 的三个阶段都不处理激活值分片——要解决激活值的显存问题,需要使用 Activation Checkpointing(梯度检查点)技术。
Activation Checkpointing
Activation Checkpointing(也叫 Gradient Checkpointing)的核心思想:不保存所有层的激活值,只保存部分“检查点”层的激活值。反向传播到某层时,从最近的检查点重新计算中间激活值。这是用额外的计算时间换取更少的显存占用。
本章小结
- DDP:数据并行,每个 GPU 维护完整的模型/梯度/优化器状态,通过 All-Reduce 同步梯度
- ZeRO Stage 1:分片优化器状态,通信量与 DDP 相同(免费优化)
- ZeRO Stage 2:分片优化器状态 + 梯度,通信量与 DDP 相当(基本免费)
- ZeRO Stage 3 / FSDP:分片一切(参数+梯度+优化器状态),有额外通信开销,但支持超大模型
- 模型激活值的显存与 batch size 线性相关,需要 Activation Checkpointing 另行处理
参数高效微调:LoRA
为什么需要参数高效微调
当以下所有手段都无法解决 OOM 问题时——混合精度训练、ZeRO Stage 3、Activation Checkpointing、batch size 已经为 1——就需要考虑参数高效微调(Parameter-Efficient Fine-Tuning,PEFT)。
来源:Slides 第51页。
参数高效微调的动机不仅仅是显存限制:
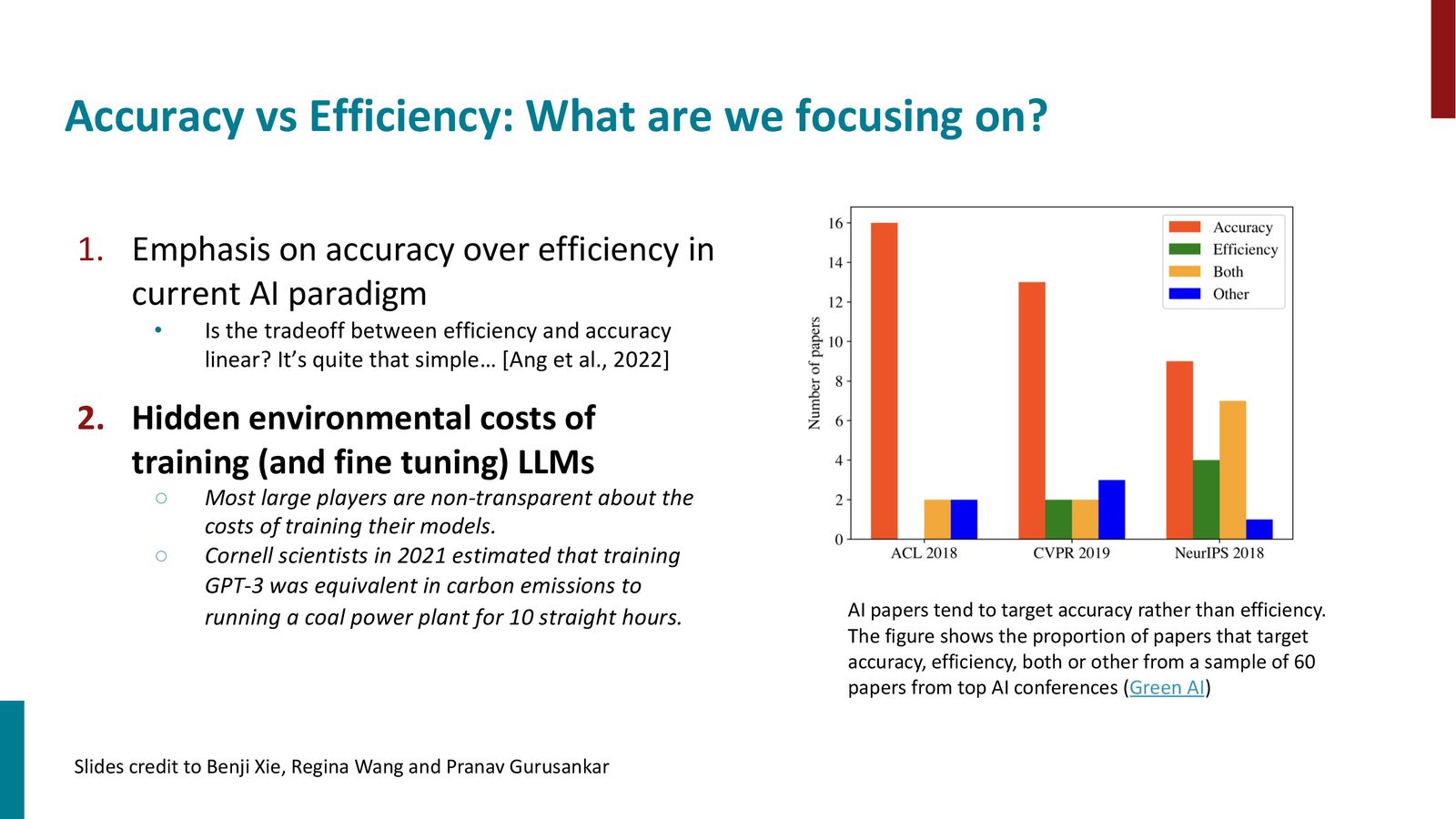
来源:Slides 第54页。
参数高效微调的三大动机
- 显存限制:GPT-3 有 1750 亿参数,全量微调需要海量显存
- 环境与成本:训练 GPT-3 的碳排放相当于运行燃煤电厂10小时;AI计算需求即将超过全球计算产能
- 科学动机:大模型严重过参数化,对于小数据集的下游任务,参数高效微调可能泛化更好(起到正则化作用)
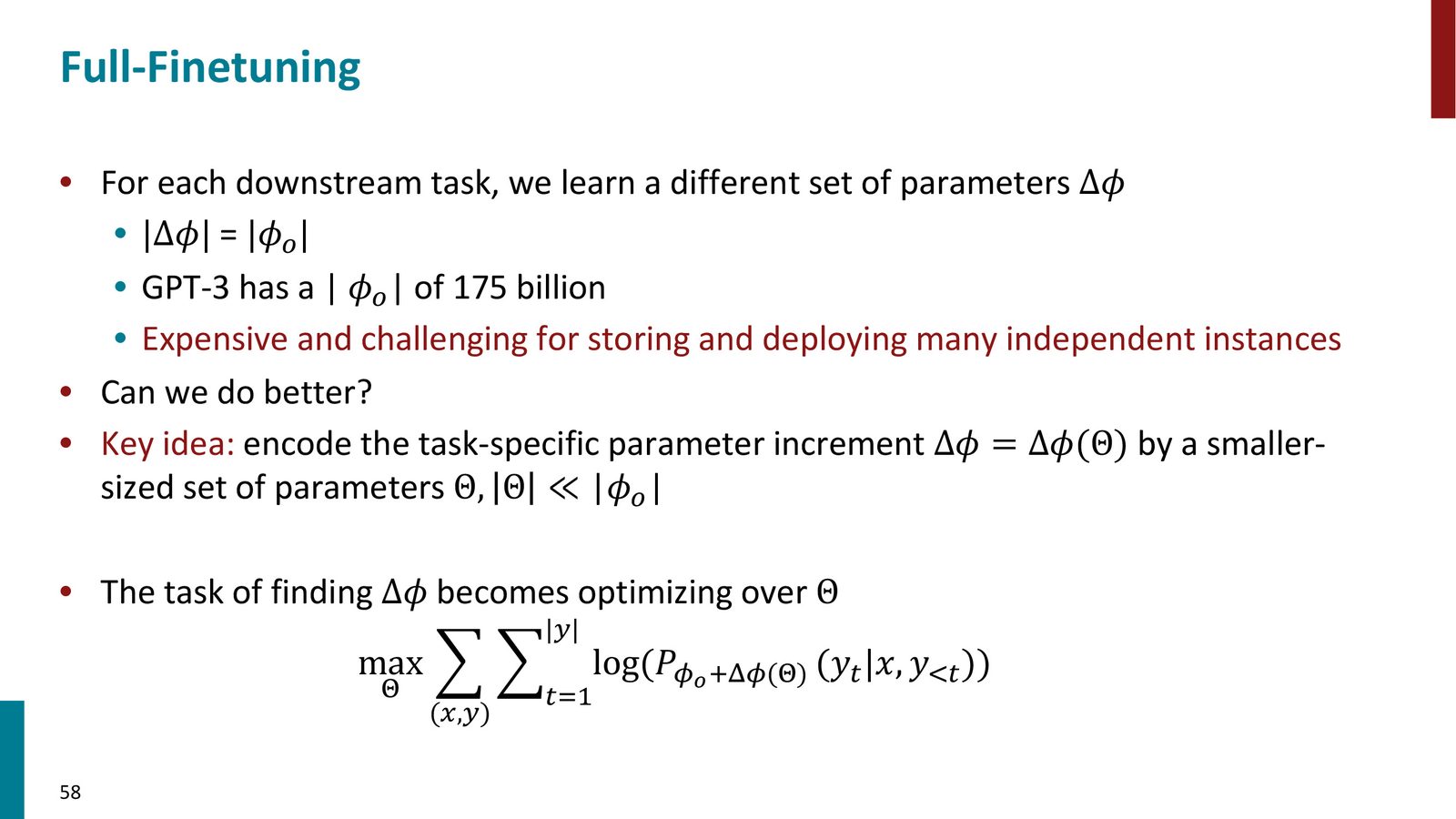
全量微调 vs 参数高效微调
全量微调(Full Fine-Tuning):更新模型的所有参数 \(\theta\),寻找最优的 \(\Delta\theta\)。
参数高效微调:只更新一小部分参数,搜索空间远小于全量微调。
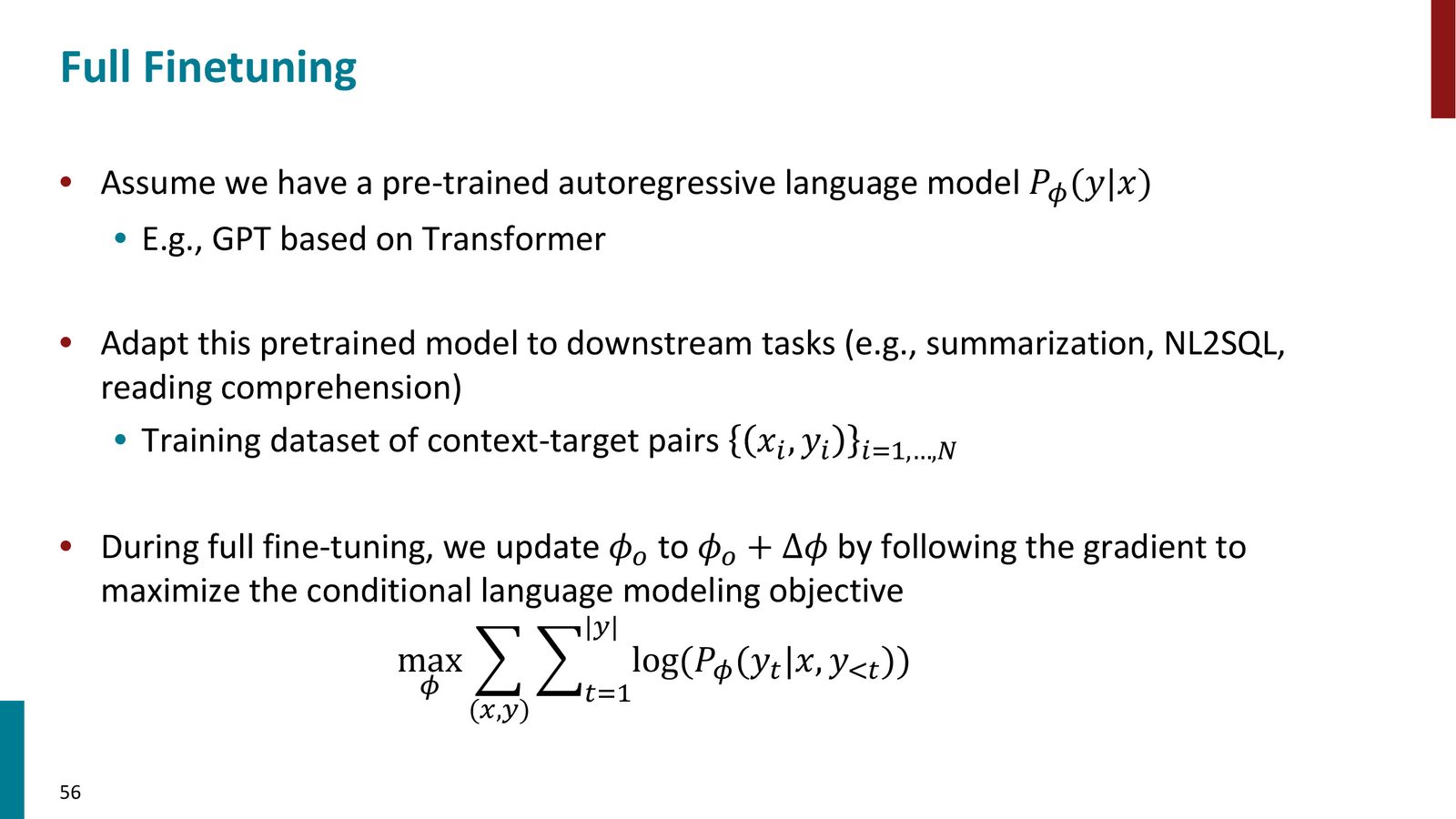
来源:Slides 第56页。
参数高效微调的额外好处:每个任务只需存储一个很小的 \(\Delta\theta\)(而非完整的模型副本),在多任务场景下极其高效。
LoRA:低秩适配
LoRA(Low-Rank Adaptation)是当前最流行的参数高效微调方法。它基于一个经验观察:大模型微调时的梯度具有低内在秩(low intrinsic rank)。
来源:Slides 第58页。
对于一个预训练权重矩阵 \(W \in \mathbb{R}^{d \times k}\),LoRA 将更新约束为低秩形式:
- \(W \in \mathbb{R}^{d \times k}\):预训练权重(冻结,不参与训练)
- \(A \in \mathbb{R}^{r \times k}\):LoRA 矩阵 A(可训练)
- \(B \in \mathbb{R}^{d \times r}\):LoRA 矩阵 B(可训练)
- \(r\):秩,远小于 \(d\) 和 \(k\)(典型值:\(r = 8\))
- \(\alpha\):缩放系数,控制预训练知识与新任务知识的权衡
LoRA 的参数节省
原始权重矩阵 \(W\) 有 \(d \times k\) 个参数。LoRA 只需学习 \(A\)(\(r \times k\) 个参数)和 \(B\)(\(d \times r\) 个参数),共 \(r \times (d + k)\) 个参数。当 \(r \ll \min(d, k)\) 时,可训练参数量远小于原始参数量。例如,\(d = k = 768\),\(r = 8\) 时,可训练参数量仅为原来的 \(\frac{2 \times 8}{768} \approx 2\%\)。
LoRA 的实现
在代码层面,LoRA 的实现非常简洁:
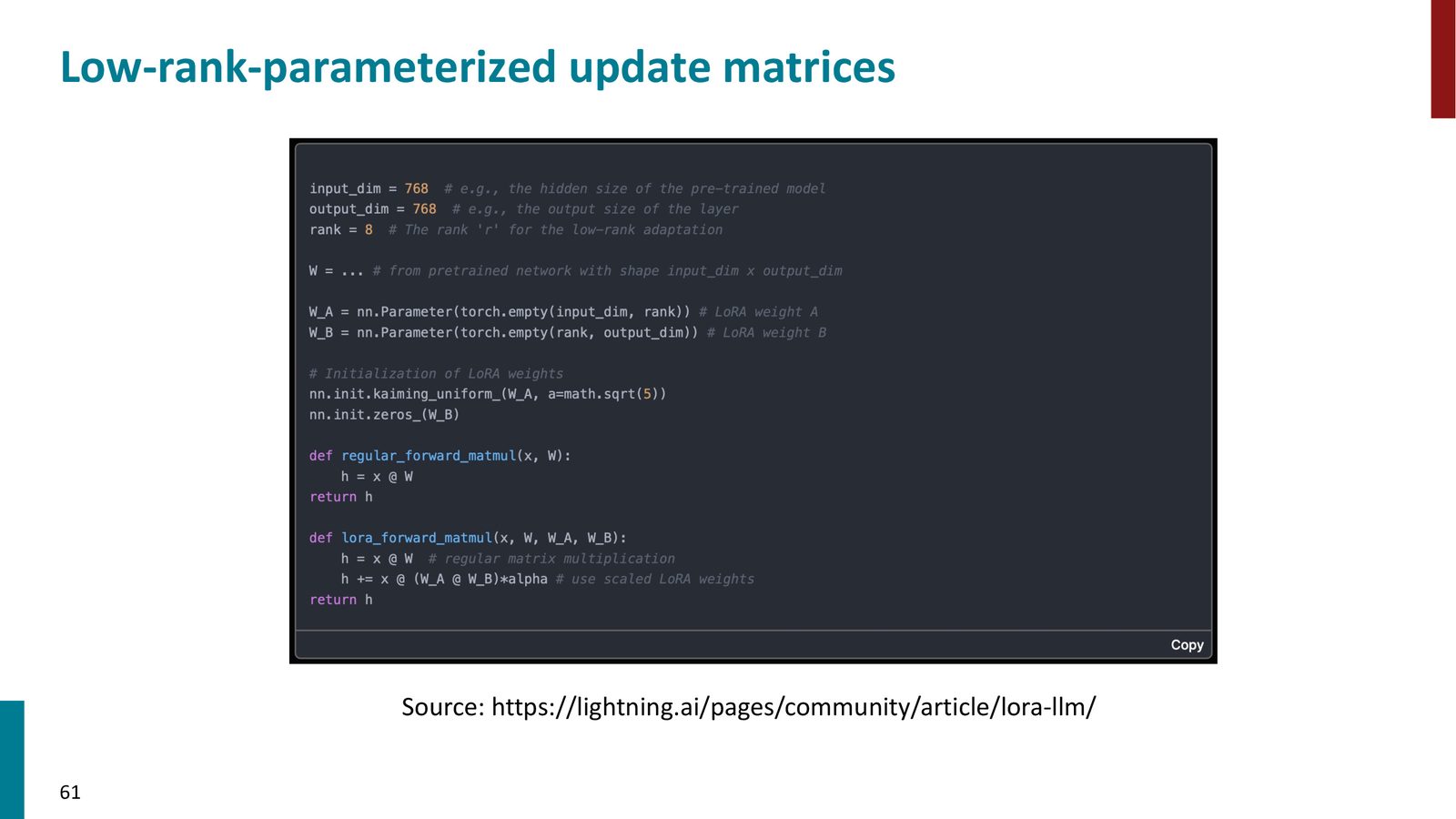
来源:Slides 第61页。
input_dim = 768 # hidden size of pre-trained model
output_dim = 768 # output size of the layer
rank = 8 # rank 'r' for low-rank adaptation
W = ... # from pretrained network, shape: input_dim x output_dim
W_A = nn.Parameter(torch.empty(input_dim, rank)) # LoRA weight A
W_B = nn.Parameter(torch.empty(rank, output_dim)) # LoRA weight B
# Initialization
nn.init.kaiming_uniform_(W_A, a=math.sqrt(5))
nn.init.zeros_(W_B) # B initialized to zero!
def regular_forward_matmul(x, W):
h = x @ W
return h
def lora_forward_matmul(x, W, W_A, W_B):
h = x @ W # regular matrix multiplication (frozen)
h += x @ (W_A @ W_B) * alpha # add scaled LoRA weights
return h
LoRA 初始化策略
\(B\) 矩阵初始化为全零,\(A\) 矩阵使用 Kaiming 初始化。这意味着训练开始时 \(\Delta W = B \cdot A = 0\),模型行为与预训练模型完全一致。随着训练进行,\(B\) 逐渐偏离零,模型开始适配下游任务。这种初始化确保了训练的稳定性。
LoRA 的关键超参数
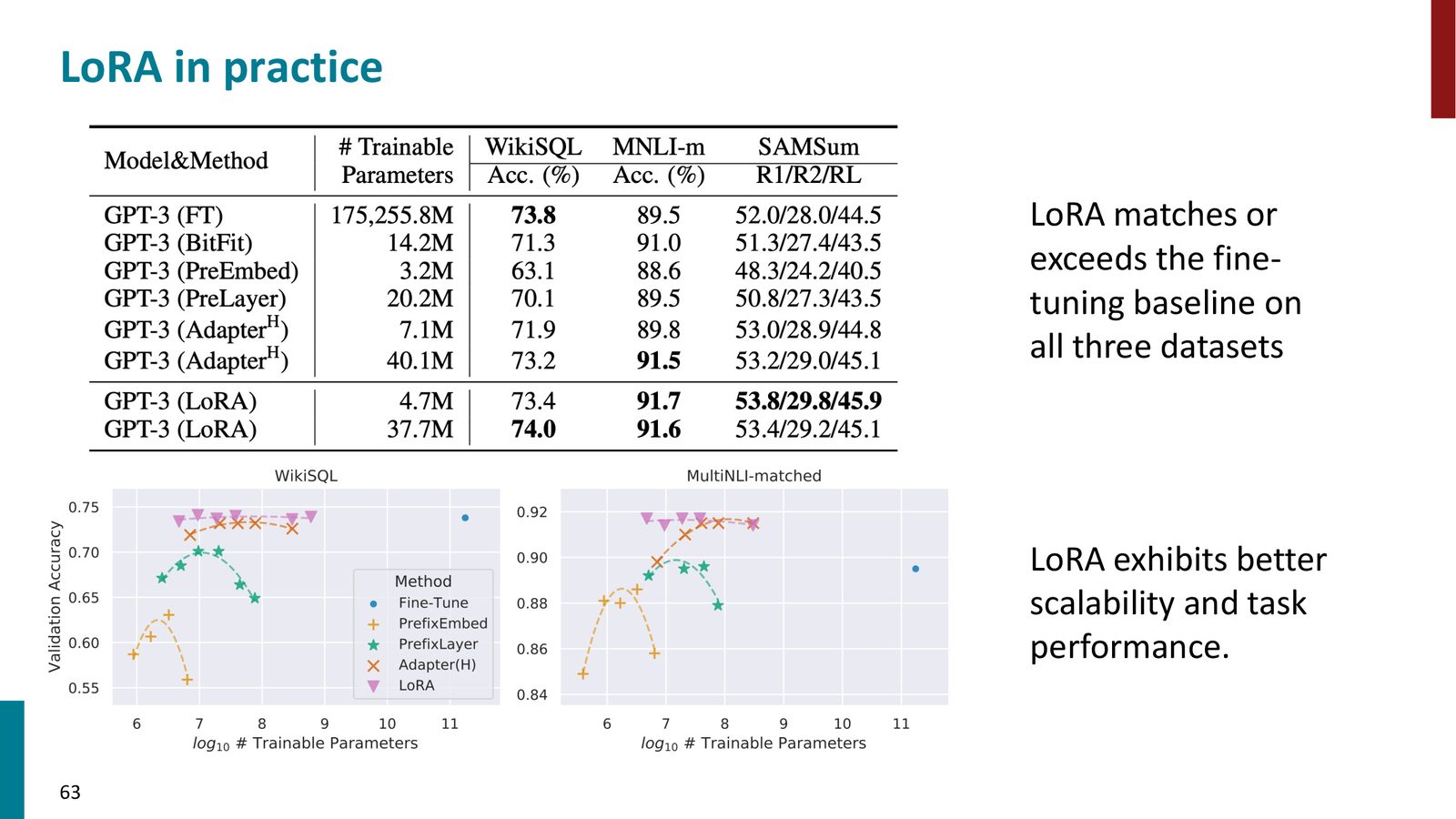
来源:Slides 第63页。
1. 应用位置:LoRA 应应用于 Self-Attention 中的Query 矩阵(\(W_q\))和 Value 矩阵(\(W_v\)),这是经验上效果最好的选择。
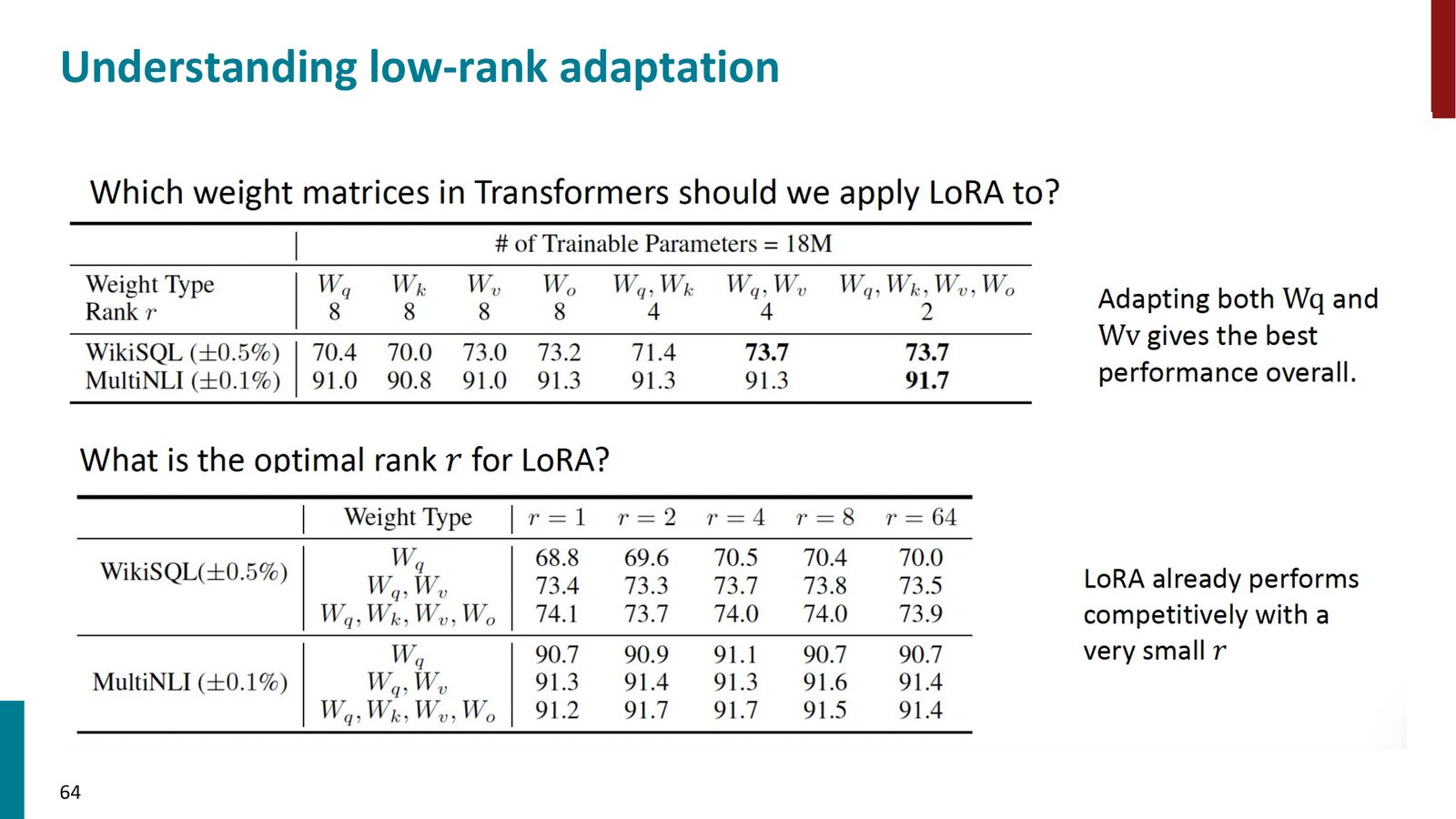
来源:Slides 第64页。
2. 秩 \(r\):实验表明,即使 \(r\) 非常小(\(r = 1\) 或 \(r = 4\)),LoRA 也能获得很好的性能。\(r = 8\) 是一个推荐的起始值。
3. 缩放系数 \(\alpha\):通常设为 1。\(\alpha < 1\) 表示更偏向保留预训练知识,\(\alpha > 1\) 表示更偏向学习新任务知识。
LoRA 实用指南
- 应用于 Query 和 Value 矩阵
- 秩设为 \(r = 8\)
- \(\alpha\) 设为 1
- 这些默认值在大多数场景下效果很好,可以作为起点
LoRA 的优势
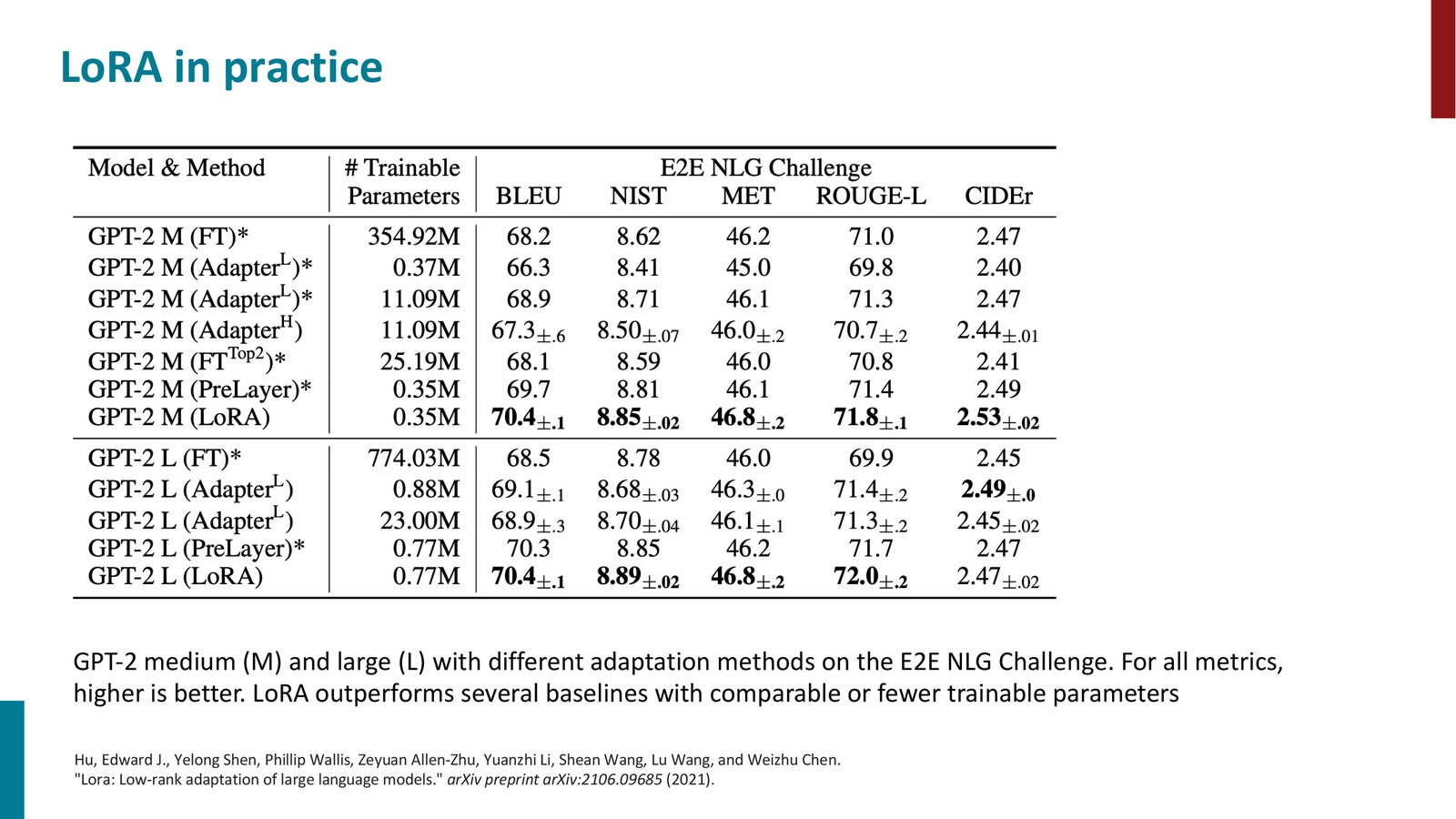
来源:Slides 第62页。
- 显存高效:只需存储和优化两个小矩阵 \(A\) 和 \(B\),大幅减少梯度和优化器状态的显存
- 推理无开销:训练完成后,可以将 \(\alpha \cdot B \cdot A\) 直接合并到 \(W\) 中,推理时与原模型无异
- 多任务高效:每个任务只需存储一组小的 \(A, B\) 矩阵;切换任务时只需替换 LoRA 权重
- 收敛于全量微调:当 \(r\) 增大到等于 \(\min(d, k)\) 时,LoRA 等价于全量微调——提供了一个连续的控制旋钮
- 正则化效果:低秩约束天然地限制了搜索空间,在小数据集上可能泛化更好
本章小结
- LoRA 将权重更新约束为低秩矩阵乘积 \(\Delta W = B \cdot A\),大幅减少可训练参数
- 应用于 Self-Attention 的 \(W_q\) 和 \(W_v\) 矩阵,秩 \(r = 8\),\(\alpha = 1\) 是好的起点
- 推理时无额外开销,多任务时只需存储小矩阵
- 在资源受限环境下,LoRA 是微调大模型的首选方案
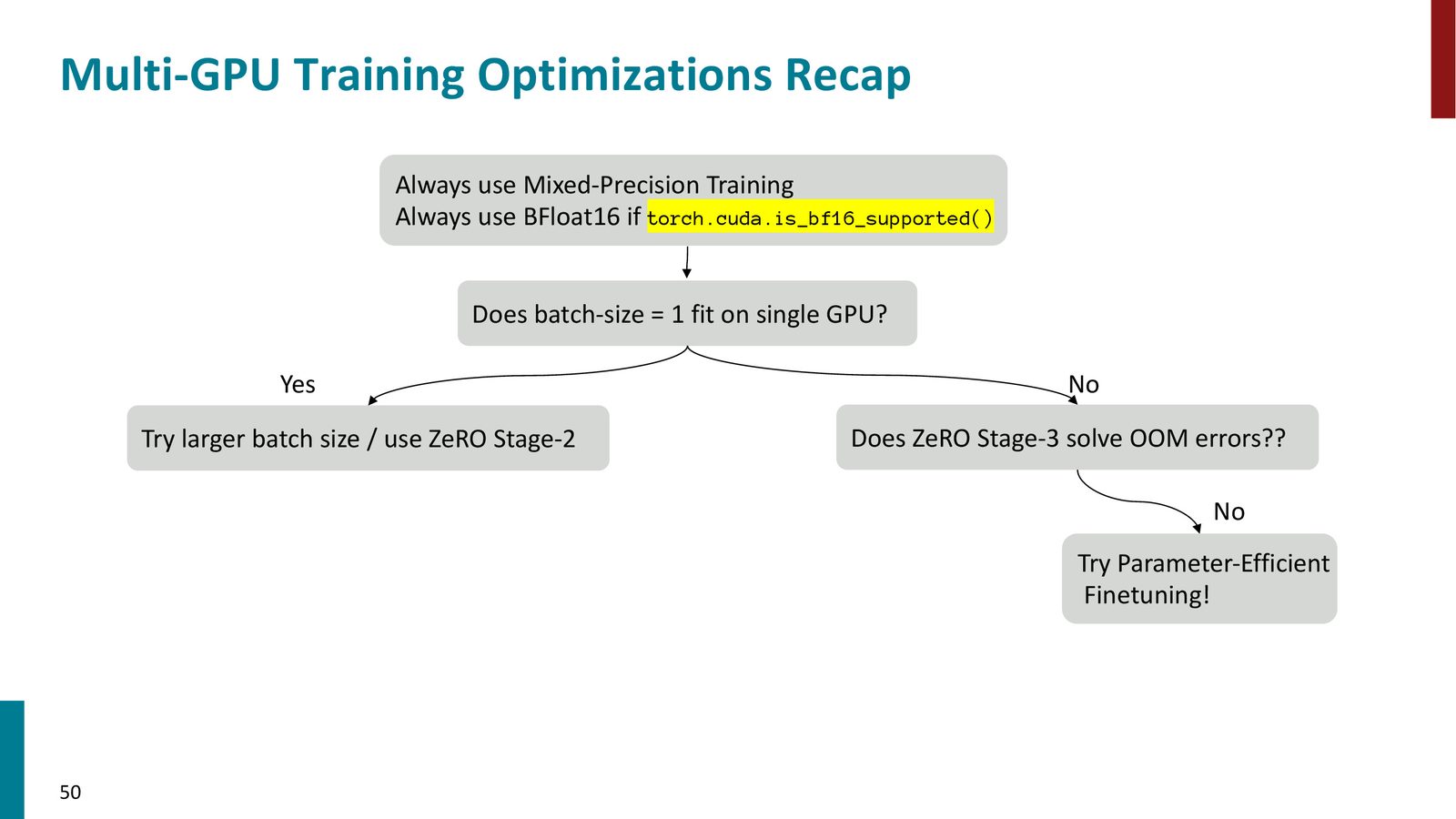
实用决策流程图
Shikhar Murty 在课程结尾给出了一个非常实用的决策流程图,帮助你在实际项目中选择合适的训练策略:
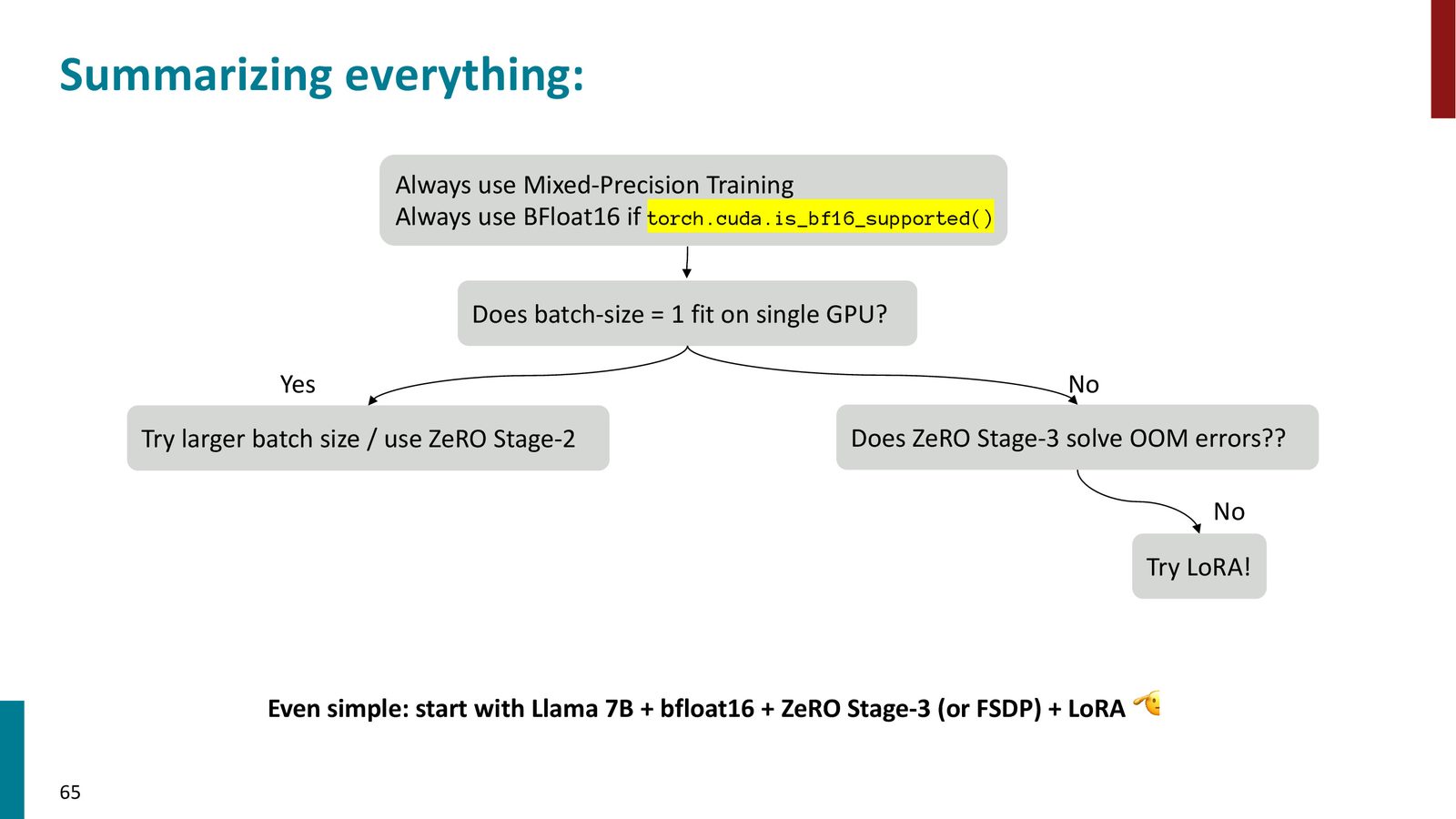
来源:Slides 第65页(最后一页)。
高效训练决策流程
- 始终使用混合精度训练。如果 GPU 支持 Ampere 架构(A100/H100/A6000),使用 BF16;否则使用 FP16 + GradScaler
-
尝试 batch size = 1。如果能放下:
-
增大 batch size
- 始终使用 ZeRO Stage 2(免费优化)
-
如果 batch size = 1 也放不下:
-
尝试 ZeRO Stage 3 / FSDP
- 尝试 Activation Checkpointing
-
如果以上全部失败:使用 LoRA
-
应用于 \(W_q\) 和 \(W_v\)
- 秩 \(r = 8\),\(\alpha = 1\)
此流程假设多 GPU 环境
上述流程中的 ZeRO / FSDP 假设你有多个 GPU。如果只有单个 GPU,ZeRO 无法帮助你——此时应直接考虑量化(quantization)或 LoRA 等技术。
本章小结
决策流程的核心逻辑是“从简单到复杂”:先用零成本的优化(混合精度、ZeRO Stage 1/2),再考虑有代价的优化(ZeRO Stage 3),最后采用改变训练范式的方法(LoRA)。在每一步都优先选择开销最小的方案。
总结与延伸
全课知识图谱
本课建立了一条从数值表示到训练策略的完整认知链:

关键 Takeaways
五条核心原则
- 始终启用混合精度训练:BF16(Ampere+)或 FP16 + GradScaler,几乎没有质量损失
- 优化器状态是显存大户:Adam 的 momentum 和 variance 占 12 字节/参数,远超模型本身
- ZeRO Stage 1/2 免费:利用 All-Reduce = Reduce-Scatter + All-Gather 的等价性,不增加通信即可节省显存
- FSDP 支持超大模型:有额外通信开销,但可通过计算-通信重叠来隐藏
- LoRA 是最后的利器:当全量微调不可行时,低秩适配以极少的参数达到接近全量微调的效果
拓展阅读
- Micikevicius et al., 2018. Mixed Precision Training. ICLR 2018. https://arxiv.org/abs/1710.03740
- Rajbhandari et al., 2020. ZeRO: Memory Optimizations Toward Training Trillion Parameter Models. SC 2020. https://arxiv.org/abs/1910.02054
- Hu et al., 2021. LoRA: Low-Rank Adaptation of Large Language Models. ICLR 2022. https://arxiv.org/abs/2106.09685
- PyTorch FSDP 文档:https://pytorch.org/docs/stable/fsdp.html
- PyTorch AMP 文档:https://pytorch.org/docs/stable/amp.html
- Hugging Face PEFT 库:https://github.com/huggingface/peft
- DeepSpeed ZeRO 文档:https://www.deepspeed.ai/tutorials/zero/