CS224R Lecture 11: 基于模型的强化学习
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于公开课程资料整理 |
| 来源 | Stanford Online |
| 日期 | 2025 年春季 |
课程回顾:算法分类总览
本讲开头,Chelsea Finn 对课程迄今为止讨论过的所有算法做了一个高层回顾。
算法分类框架
- 在线 (Online) vs 离线 (Offline):在线算法允许在训练中持续与环境交互收集数据;离线算法仅使用给定的固定数据集。
-
Online 类别下:
-
On-policy RL:仅使用当前策略产生的数据(如 REINFORCE, PPO)
- Off-policy RL:可以使用历史策略的数据(如 SAC, TD3)
-
Offline 类别下:
-
Imitation Learning:行为克隆 (BC)、DAgger
- Offline RL:CQL 等约束策略不偏离数据分布的方法
Model-Based RL 的核心思想
什么是 Model-Based RL
与 model-free 方法不同,model-based RL 显式地学习环境的动力学模型(dynamics model),然后利用该模型来做决策。
动力学模型
学习一个函数 \(f_\phi(\mathbf{s}, \mathbf{a})\) 来近似环境的状态转移 \(p(\mathbf{s}' | \mathbf{s}, \mathbf{a})\):
训练目标是最小化预测误差:
其中数据 \(\mathcal{D} = \{(\mathbf{s}, \mathbf{a}, \mathbf{s}')_i\}\) 来自与环境的交互。
来源:Slides 第 5 页。
为什么要学习模型
Model-Based vs Model-Free 的核心权衡
- 数据效率:Model-based 方法通常比 model-free 方法数据效率高得多。学到的模型可以用来"想象"无数种可能的轨迹,而不需要真实执行。
- 代价:模型不完美,基于不准确模型的决策可能导致性能下降。这就是模型偏差(model bias)问题。
本章小结
Model-Based RL 的核心思路是"先学世界模型,再用模型做规划"。它在数据稀缺场景(如机器人)中特别有价值,但需要妥善处理模型误差。
如何使用学到的模型
方法 1:基于模型的规划(Planning)
有了动力学模型后,可以直接在模型中搜索最优动作序列:
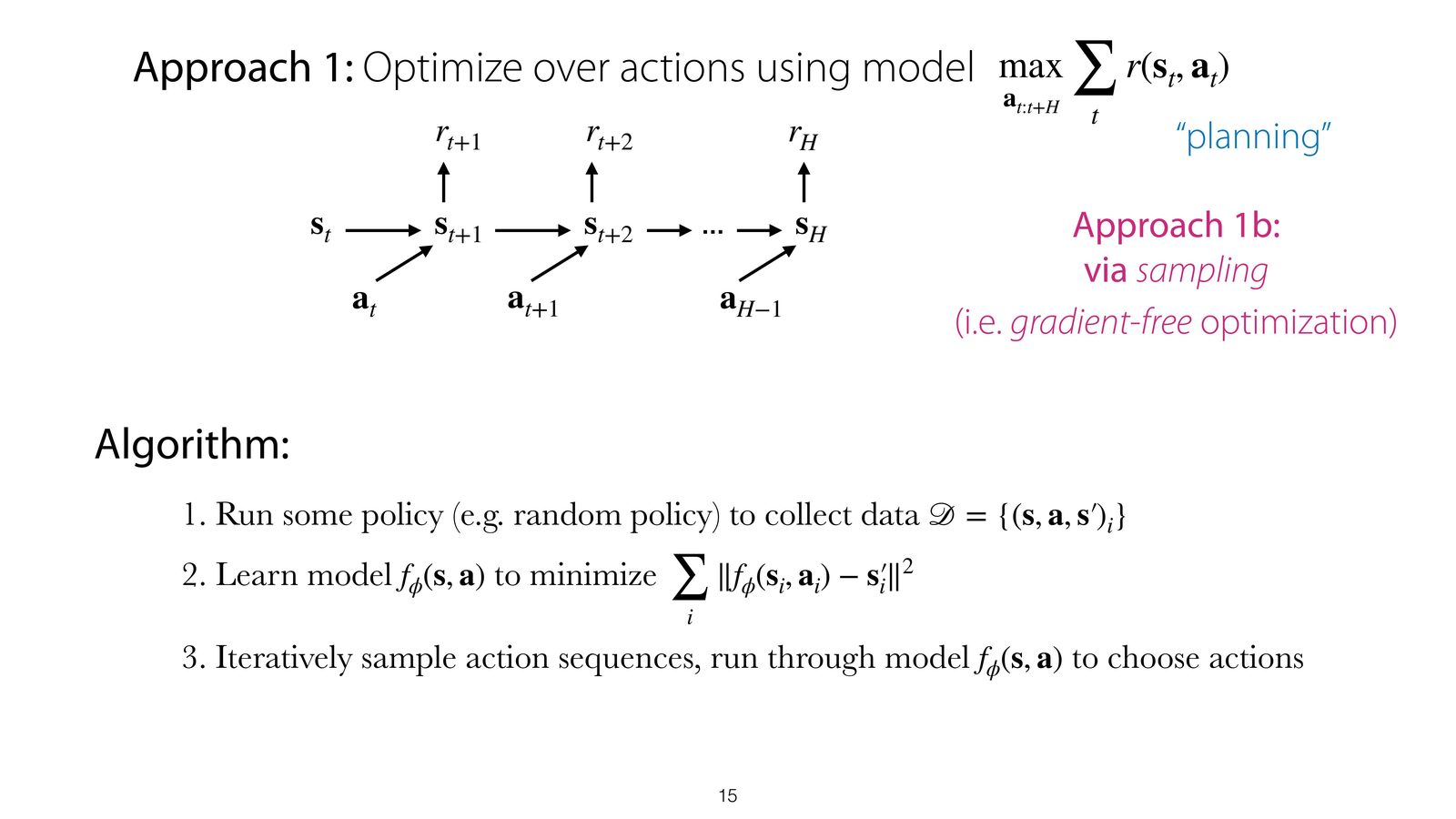
来源:Slides 第 15 页。
具体算法流程:
- 运行某个策略(如随机策略)收集数据 \(\mathcal{D} = \{(\mathbf{s}, \mathbf{a}, \mathbf{s}')_i\}\)
- 学习模型 \(f_\phi(\mathbf{s}, \mathbf{a})\)
- 迭代地采样动作序列,通过模型前向推演选择最优动作
随机打靶法(Random Shooting)
最简单的方法是随机采样 \(N\) 个动作序列,在模型中 rollout 每个序列,选择累积奖励最高的那个序列的第一个动作。
CEM(Cross-Entropy Method)
CEM 是一种更高级的无梯度优化方法:
- 初始化动作分布(如高斯分布)
- 从分布中采样 \(N\) 个动作序列
- 在模型中评估每个序列的累积奖励
- 选择 top-\(K\) 的"精英"序列
- 用精英序列更新动作分布的均值和方差
- 重复若干轮迭代
MPC(Model Predictive Control)
在实际执行时,通常采用 MPC 范式:每一步只执行规划得到的第一个动作,然后在新的状态上重新规划。这可以部分缓解模型在长时间跨度上的累积误差。
方法 1a:基于梯度的规划
如果模型可微,可以直接对动作序列求梯度来优化。但这种方法在实践中容易陷入局部最优,且对模型的光滑性要求较高。
方法 2:使用模型生成合成数据
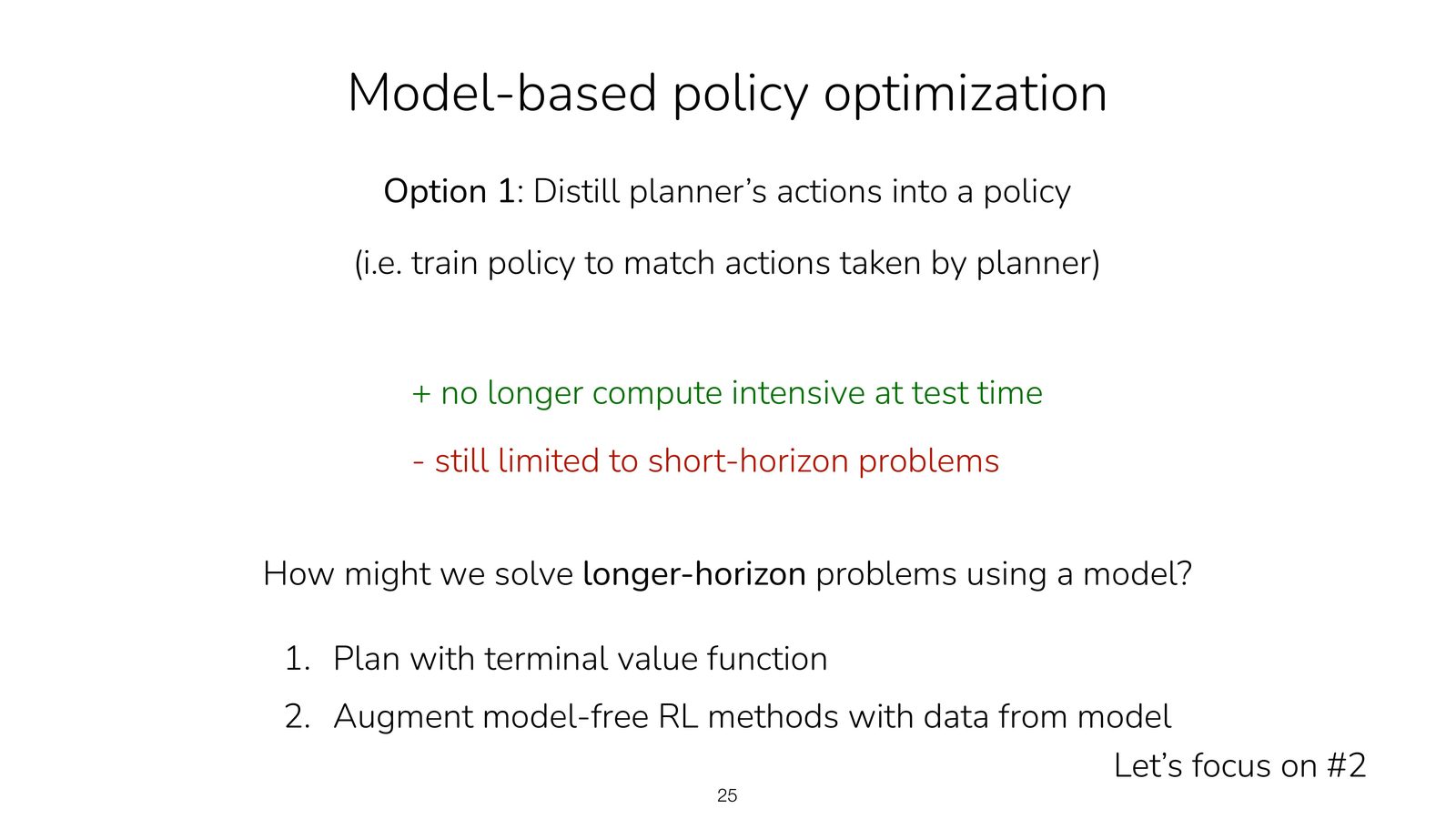
来源:Slides 第 25 页。
规划方法的主要局限:
- 测试时计算开销大(每步都需要优化)
- 受限于短视野问题
解决长视野问题的两种思路:
- 带终端值函数的规划:用短视野规划 + 学到的值函数作为终端估值
- Dyna 风格方法:用模型生成合成数据来增强 model-free RL 的训练
Dyna 算法
Dyna 是 model-based RL 的经典范式:
- 收集真实数据,训练/更新动力学模型
- 用模型生成合成数据(synthetic rollouts)
- 将合成数据与真实数据混合,用 model-free RL 算法更新策略
核心优势是利用模型的泛化能力将有限的真实数据"放大"为大量训练数据。
处理模型误差
模型误差的累积效应
模型在每一步的小误差会沿时间轴累积。如果规划视野为 \(H\),且每步误差为 \(\epsilon\),则 \(H\) 步后的总误差可能高达 \(O(H \cdot \epsilon)\) 甚至更大(如果动力学是不稳定的)。因此,盲目信任模型会导致策略"利用"模型的缺陷(model exploitation)。
应对策略:
- 模型集成(Ensemble):训练多个模型,用不同模型的预测来估计不确定性
- 短视野 rollout:限制模型 rollout 的步数
- 持续更新模型:随着收集新数据不断更新模型
本章小结
模型可以通过两种方式使用:(1) 直接规划(优化动作序列),(2) 生成合成数据增强 model-free RL。两种方式都需要妥善处理模型误差。
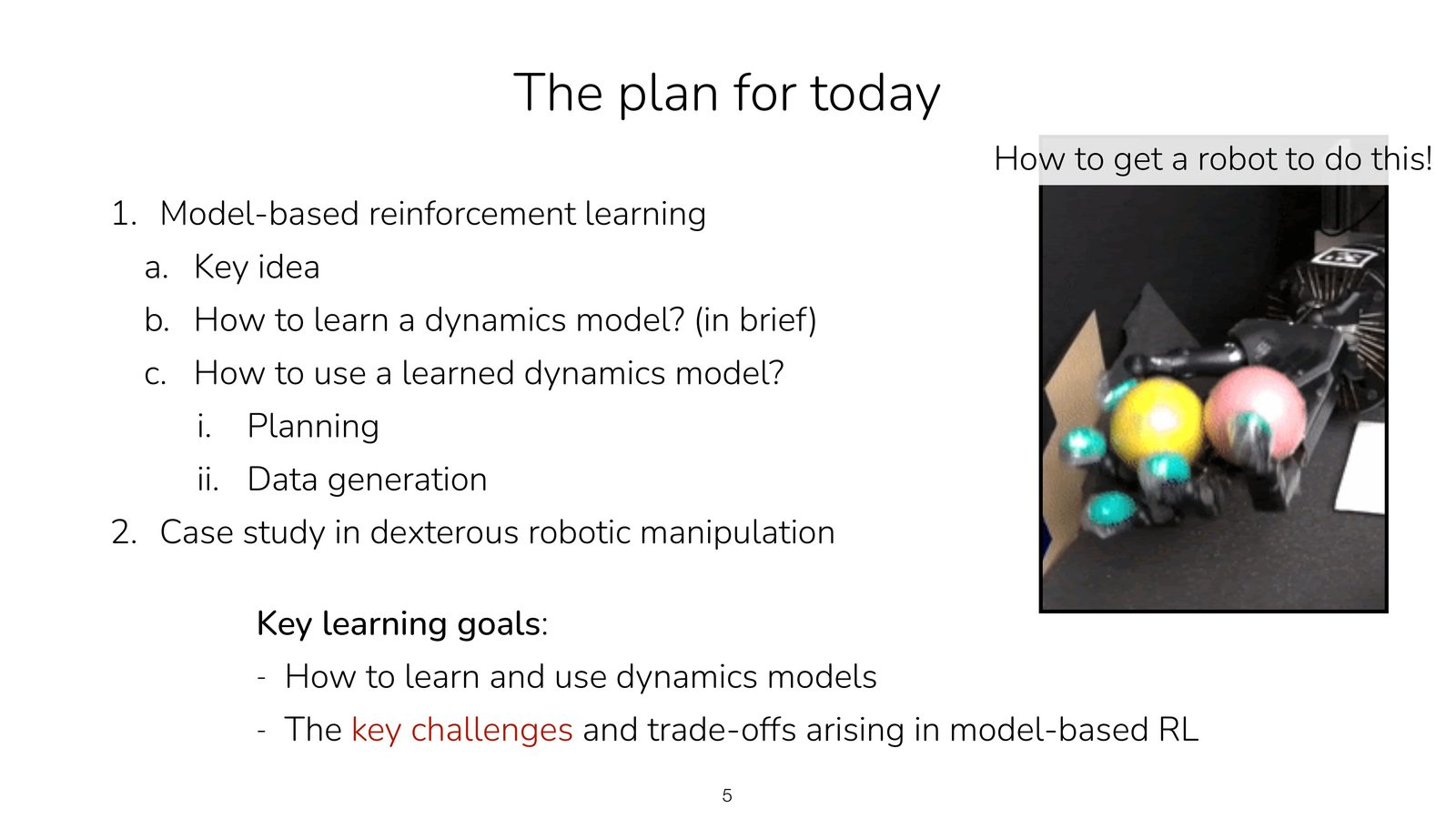
案例研究:灵巧操作中的 Model-Based RL
讲者介绍了一个具体案例,使用 model-based RL 让机器人灵巧手进行物体操作。
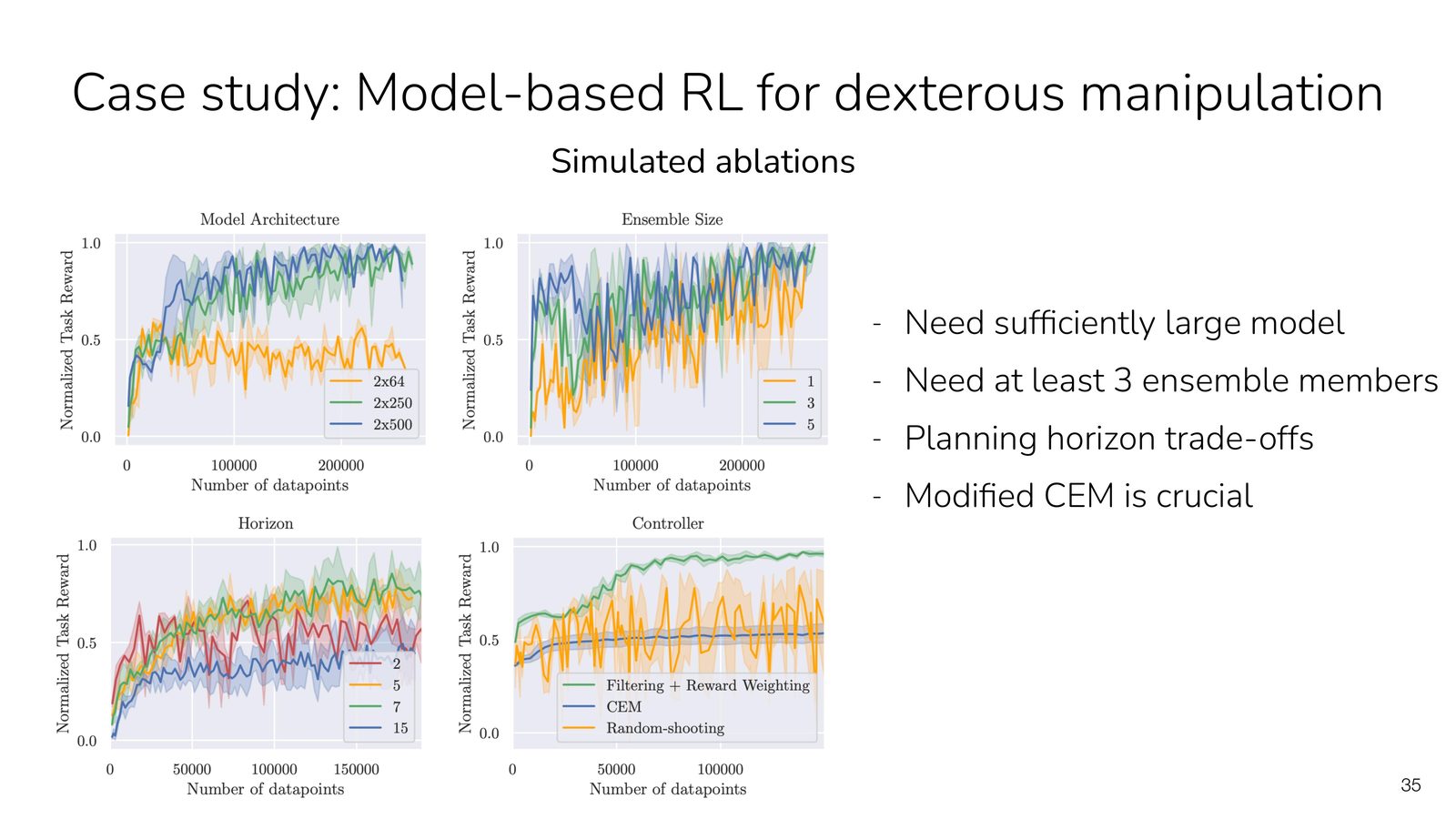
来源:Slides 第 35 页。
关键实验发现:
- 需要足够大的模型架构(2x250 或 2x500 隐藏单元)
- 至少需要 3 个集成成员来获得可靠的不确定性估计
- 规划视野存在权衡:太短看不到足够远的未来,太长模型误差累积
- 改进的 CEM 控制器(如 Filtering + Reward Weighting)比 Random Shooting 好得多
何时使用 Model-Based RL
Model-Based RL 的适用场景
- 数据收集代价高昂(如真实机器人)
- 状态空间相对低维且可预测
- 需要快速适应新任务(模型可迁移)
- 动力学具有一定的可学习结构
不适合的场景:高维观测(如图像)且动力学高度随机的环境。
本章小结
灵巧操作案例展示了 model-based RL 在数据效率上的优势,以及集成、规划视野等超参数对性能的关键影响。
总结与延伸
Model-Based RL 是 RL 工具箱中的重要组成部分,其核心优势在于数据效率。
关键要点:
- 学习动力学模型可以大幅减少所需的真实交互数据
- 模型可用于 planning(CEM/MPC)或生成合成数据(Dyna 风格)
- 模型误差是核心挑战,需要通过集成、短视野 rollout、持续更新来缓解
- 在机器人操作等数据昂贵的场景中特别有价值
拓展阅读
- Nagabandi et al., “Neural Network Dynamics for Model-Based Deep RL with Model-Free Fine-Tuning,” ICRA 2018
- Chua et al., “Deep Reinforcement Learning in a Handful of Trials using Probabilistic Dynamics Models (PETS),” NeurIPS 2018
- Janner et al., “When to Trust Your Model: Model-Based Policy Optimization (MBPO),” NeurIPS 2019
- Sutton, “Dyna, an Integrated Architecture for Learning, Planning, and Reacting,” 1991