[LLM Agents SP25] Reasoning, Memory & Planning of Language Agents
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于 Yu Su 授课内容整理 |
| 来源 | Berkeley RDI |
| 日期 | 2026-04-02 |
![[LLM Agents SP25] Reasoning, Memory & Planning of Language Agents](cover.jpg)
课程定位与核心命题
本讲由 Ohio State University 的 Yu Su 教授主讲,主题是语言智能体(Language Agents)的三个关键能力:Reasoning、Memory 与 Planning。授课并没有把 Agent 当作单一产品形态,而是将其作为一个可扩展的系统对象:模型需要在动态环境中持续感知、决策、执行、复盘和改进。
本讲核心主张
“Reasoning is for better acting.” 推理不是为了在纸面题目上展示步骤,而是为了在真实环境中做出更好的动作选择。对应地,Memory 不是日志堆积,Planning 也不是静态步骤列表;它们都服务于长期任务成功率与稳定性。
Yu Su 先回顾了过去两年 Agent 热潮中常见的叙事偏差:一方面,外界对 “2025 是 Agent 元年” 的预期极高;另一方面,团队在生产实践中经常面对成本失控、长链路任务崩溃和评测口径不稳定等问题。课程的价值就在于用工程化框架替代口号化叙事。
高热度不等于高可用
- Demo 成功不代表任务分布下的稳定成功;
- 单次推理质量高不代表多轮执行质量高;
- 模型分数领先不代表系统总成本可接受。
本章小结
本章明确了整讲的判断标准:Agent 研究应以系统行为质量为中心,而不是以孤立模型能力为中心。后续关于 Reasoning、Memory、Planning 的讨论,均围绕 “如何提升真实任务成功率” 展开。
Agent-First 视角下的问题重构
从模型中心到系统中心
课程提出 “Agent-first” 视角:将智能体视作一个持续运行的决策系统,而非一次性问答接口。该系统至少包含五个基本要素:状态表示、动作空间、记忆机制、规划机制与外部反馈回路。只有这五个要素协同,Agent 才能跨越短任务到长任务的鸿沟。
Agent 的最小系统抽象
可以将语言智能体简化为如下循环:
其中每个环节都可被独立增强,但系统性能取决于各环节之间的接口质量和延迟成本。
历史脉络与范式演进
从早期 AutoGPT 到当前结合 ReAct、Tool Use、Self-Reflection 的新系统,范式演进并不是 “算法替代算法”,更像 “能力叠加能力”。课程强调三种增长路径:推理质量增长、记忆可靠性增长、规划尺度增长。它们共同决定可解决任务的上限。
| 阶段 | 代表能力 | 主要瓶颈 |
|---|---|---|
| 早期 Agent 原型 | Prompt + 工具调用 | 长链任务中易漂移、易死循环 |
| 中期工程化阶段 | ReAct + Reflection + Retrieval | 状态污染、成本高、调参复杂 |
| 当前系统化阶段 | Reasoning actions + memory architecture + replanning | 验证器质量与跨场景泛化仍不足 |
常见误解:把 Agent 当成“会调用工具的聊天机器人”
这类定义忽略了长期状态管理和规划反馈。真正的 Agent 系统必须显式处理失败恢复、策略切换、记忆更新和目标重设,否则能力会停留在短任务。
本章小结
Agent-first 视角把问题从 “模型会不会答” 转成 “系统能否稳定完成任务”。这为后续三大能力模块提供了统一评估口径。
Reasoning:从“会想”到“会做”
Reasoning 的工程目标
Yu Su 在课程中反复强调:Reasoning 的最终目标不是展示推理链,而是提高行动质量(Action Quality)。如果推理不能带来更好的动作序列、更低错误率或更高样本效率,那么该推理就是无效开销。
Reasoning for Acting
- 用推理提升动作选择质量,而不是增加表面思考长度;
- 推理应当可触发策略修正(replan)和工具切换(tool switch);
- 推理的价值最终体现在成功率、成本与鲁棒性三项指标上。
从 CoT 到可执行推理
课程把 CoT、ReAct、Self-Reflection、Meta-Reasoning 放在同一连续谱中:它们本质上都是 “在动作前后注入结构化思考”。差异不在于是否推理,而在于推理如何连接环境状态和动作接口。
四类常见推理动作
- 任务分解:将复杂目标拆成可验证子目标;
- 证据对齐:用外部检索/工具输出修正内部假设;
- 失败归因:识别错误来源(知识缺失、工具失败、规划错误);
- 策略改写:基于归因结果重写后续动作计划。
推理 Token 并非越多越好
在没有有效验证器与边界约束时,长推理链可能导致:
- 成本爆炸;
- 置信幻觉放大;
- 错误路径被 “解释得更像对”。
本章小结
Reasoning 是 Agent 的决策增益机制。真正重要的不是 “有没有推理”,而是 “推理是否改变了更优行动”。
Language 作为统一认知接口
为什么 Language 仍是中心媒介
课程指出,语言具备三重角色:状态编码介质、策略表达介质、协作协议介质。这使得语言不仅能承载自然语言解释,还能承载符号结构、程序片段与中间决策记录。
语言接口的系统优势
- 跨模态统一:文本可作为视觉、代码、结构化数据的交换层;
- 跨模块统一:planner、memory manager、tool router 可共享同一种协议;
- 跨代理统一:multi-agent 协作可以先通过语言协议快速原型化。
符号推理与语言推理的融合
Yu Su 并未将 symbolic reasoning 与 neural reasoning 对立,而是强调 “分工融合”:语言推理负责高维语义压缩与策略探索,符号推理负责精确约束与可验证计算。二者结合是长链任务稳定性的关键。
融合策略示例
- 语言模型生成候选计划,符号模块做约束检查;
- 语言模型做启发式搜索,程序执行器做终局验证;
- 语言模型做错误解释,规则系统做安全拦截。
仅靠语言推理的边界
当任务需要高精度数值、强约束组合优化或形式化证明时,单纯自然语言链条容易失真,需要引入程序化中间表示。
本章小结
Language 不是 “提示词输入格式”,而是 Agent 系统的统一通信层。其价值在于连接不同能力模块,而非替代所有模块。
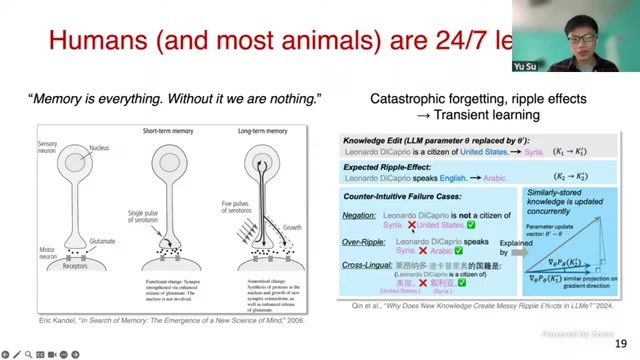
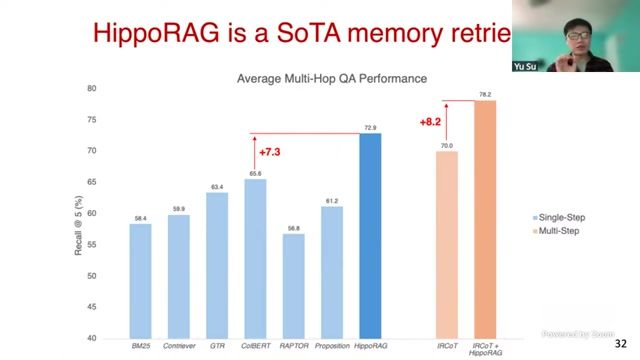
Memory:从上下文缓存到可持续知识底座
记忆分层设计
课程将 Memory 视为 Agent 稳定性的决定性因素。没有分层记忆,长任务会退化成 “每轮从零开始”。本讲建议至少区分:working memory、episodic memory、semantic memory、procedural memory。
| 记忆层 | 典型内容 | 工程重点 |
|---|---|---|
| Working memory | 当前步骤状态、临时变量 | 快速更新、低延迟、可裁剪 |
| Episodic memory | 任务轨迹、失败记录、决策分支 | 支持复盘与策略迁移 |
| Semantic memory | 稳定事实、领域知识、工具文档 | 检索精度与版本一致性 |
| Procedural memory | 可复用工作流、策略模板、工具调用范式 | 抽象粒度与触发条件设计 |
Memory 的本质是可控读写,不是单向存储
记忆系统必须回答四个问题:写什么、何时写、如何读、何时忘。若只做 “全量写入”,很快会出现噪声累积和检索错配,最终拖垮推理与规划质量。
Memory 操作的最小 API
write(event, importance, scope):写入时附带重要性与作用域;retrieve(query, budget, freshness):检索时显式预算和时效约束;compress(window):按任务阶段进行摘要与压缩;evict(policy):执行过期淘汰与冲突合并。
记忆污染是长任务失败的隐蔽主因
若历史错误结论被反复检索,Agent 会稳定地做错事。应通过来源置信度、冲突检测和回滚机制降低污染传播。
本章小结
Memory 决定了 Agent 能否跨轮次、跨任务累积有效能力。分层、可控、可回滚是高质量记忆系统的三个底线。
Planning:长程任务中的策略控制器
规划的作用边界
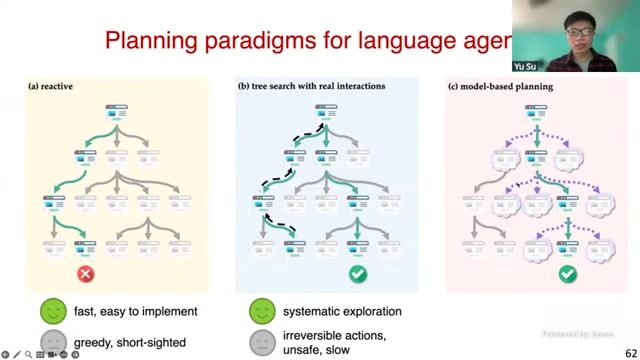
课程将 Planning 定义为 “在约束下分配未来动作预算”,而非生成静态待办清单。高质量规划必须允许动态重规划(dynamic replanning),因为环境反馈会持续改变最优动作序列。
规划闭环的三个必要环节
- 目标分解:将最终目标映射为可验证中间里程碑;
- 执行监控:持续比较预期状态与真实状态;
- 计划改写:在偏差超阈值时触发重规划。
规划与搜索的结合
Yu Su 的观点是 “规划不是搜索的替代,搜索也不是规划的替代”。规划决定搜索空间结构,搜索决定局部动作最优。系统工程中应按任务复杂度选择是否引入 MCTS、beam search 或启发式候选生成。
何时需要显式搜索
- 行动后果延迟且不可逆;
- 局部最优陷阱明显;
- 单步评分器信号弱、噪声大。
过度规划的代价
过细粒度规划会占用大量上下文与计算预算,并削弱执行阶段的实时适应能力。规划粒度应与环境变化速率匹配。
规划器伪代码
state = observe()
plan = planner.make_plan(goal, state)
for step in range(budget):
action = planner.next_action(plan, state)
result = env.execute(action)
state = update_state(state, result)
memory.write(result)
if planner.need_replan(state, goal):
plan = planner.replan(goal, state, memory.retrieve(goal))
本章小结
Planning 的关键不在于 “提前想得多完整”,而在于 “执行中能否快速修正”。动态重规划是长程 Agent 成败分水岭。
Multi-Agent:协作增益与通信成本
何时使用多智能体
课程并不鼓励 “为并行而并行”。Multi-agent 适用于任务可分解、角色边界清晰、通信协议稳定的场景。若任务强耦合或中间状态高度共享,单体 Agent + 强 memory 往往更稳。
多智能体收益的来源
- 角色专门化降低单体策略复杂度;
- 并行探索提高候选解覆盖率;
- 交叉审阅减少单路径幻觉风险。
| 维度 | 单体 Agent | Multi-Agent |
|---|---|---|
| 上下文管理 | 简单,但可能拥塞 | 分布式,但需同步协议 |
| 执行效率 | 串行,调试容易 | 并行潜力高,协调复杂 |
| 错误定位 | 集中式定位较直观 | 需区分角色错误与通信错误 |
| 成本结构 | 预测相对稳定 | 通信与重复推理开销高 |
多智能体系统的落地原则
先设计协议再增加角色。协议至少包括:消息格式、共享状态范围、冲突解决规则、超时与回退策略。
多智能体最常见失败模式
- 角色职责重叠,导致重复劳动;
- 通信信息膨胀,吞噬上下文预算;
- 缺少统一验收器,形成“彼此确认但整体错误”。
本章小结
Multi-agent 不是默认更强,而是条件性更强。关键在于任务分解质量和通信协议设计,而非 agent 数量本身。
评测与运维:把 Agent 变成可管理系统
评测必须覆盖全链路
Yu Su 提醒:只测最终答案会掩盖大量系统性问题。Agent 评测应覆盖 “轨迹质量”、“工具调用正确率”、“重规划触发质量” 和 “记忆读取准确率”。
评测口径建议
- Outcome metrics:任务成功率、完成时延、总成本;
- Process metrics:中间步骤正确率、无效动作率、反复重试率;
- Safety metrics:越权调用率、敏感信息泄露率、错误恢复时间。
离线评测与在线评测的分工
- 离线:快速回归算法改动,定位模块问题;
- 在线:观测真实分布漂移,校正离线假设;
- 两者之间需共享统一事件 schema,否则难以闭环。
只看 leaderboard 的风险
高分可能来自任务模板拟合,而非真实泛化。生产系统必须对分布外任务建立降级策略和人工接管机制。
工程可观测性与故障恢复
稳定 Agent 需要细粒度 tracing:每步决策依据、调用工具、返回结果、记忆命中、计划变更都应可审计。否则定位问题只能靠复现猜测,迭代效率极低。
本章小结
评测和运维不是附加组件,而是 Agent 能否持续进化的基础设施。没有可观测性,就没有可控迭代。
案例拆解:Web、代码与研究三类任务
案例一:Web Agent 的长链交互
在 Web 场景中,Agent 往往需要跨页面导航、解析半结构化信息并完成多步决策。课程观点是,这类任务的失败通常不是 “模型不懂页面”,而是 “状态同步与计划更新不及时”。典型问题包括:页面 DOM 变化导致定位失效、登录态中断、同义目标词触发错误点击、以及工具返回值与视觉状态不一致。
Web Agent 的核心难点是“弱结构环境中的强闭环控制”
Agent 必须在不稳定的界面状态下持续完成 Observe-Reason-Act 闭环。若缺乏显式状态机和步骤级验证器,错误会跨轮扩散,最终表现为随机性失败。
一个可行策略是把页面操作划分为 “导航动作”、“提取动作”、“确认动作” 三类,并为每类动作配置不同验证逻辑。比如导航动作关注 URL/页面标题变化,提取动作关注字段完整性,确认动作关注业务约束是否满足。这样做可以降低 “一步错全盘错” 的概率。
Web Agent 评测建议
- 记录动作级成功率,而非只记录终局成功率;
- 统计重试次数与回退次数,评估计划稳定性;
- 按页面复杂度分桶,避免平均值掩盖难例。
案例二:Code Agent 的仓库级任务
代码任务看似结构化,但仓库级目标通常涉及跨文件依赖、隐式规范和历史约束。课程强调,Code Agent 的提升路径不只是 “更强代码生成”,而是 “更强的仓库状态理解 + 更强的验证反馈回路”。
只做单轮补丁会放大技术债
如果 Agent 只追求当前测试通过,而忽略架构一致性、命名规则和接口契约,短期成功会变成长期维护成本。Code Agent 需要把 lint、type check、unit test、integration test 联合作为验证器。
在实现层面,可将任务分为 “理解”、“修改”、“验证”、“复盘” 四阶段,并把每阶段输出写入 episodic memory。这样做的价值是:当任务失败时,系统可以定位到底是需求理解偏差、实现错误还是验证覆盖不足,从而触发针对性重规划。
Code Agent 的 memory 建议
- semantic memory 存储项目规范、公共接口和历史决策;
- episodic memory 存储本次任务的关键尝试与失败原因;
- procedural memory 存储复用脚本(如回归测试工作流)。
案例三:Research Agent 的证据闭环
研究任务常被误判为 “纯 reasoning 问题”。Yu Su 的框架下,Research Agent 同样需要强 memory 与 planning:前者用于证据沉淀与冲突管理,后者用于研究路线切换和实验预算分配。
Research Agent 的关键不是“写得像论文”,而是“证据可追溯”
系统应为每条结论绑定来源、置信度和时间戳。否则,当检索语料更新或工具返回变化时,旧结论会在记忆层中持续污染后续推理。
一个实用做法是采用 “结论-证据-反证” 三元结构写入 memory:Agent 每次提出结论时必须附上支持证据与潜在反例。这能显著提升反思(reflection)阶段的有效性,降低 “解释型幻觉”。
| 任务类型 | 优先能力 | 首要风险 |
|---|---|---|
| Web Agent | 状态同步 + 动态重规划 | 页面漂移导致动作失效 |
| Code Agent | 验证闭环 + 仓库记忆 | 局部最优补丁侵蚀全局质量 |
| Research Agent | 证据管理 + 反思机制 | 无来源结论的记忆污染 |
本章小结
三类任务的共同点是都需要系统闭环;差异在于验证器和记忆策略的设计重点不同。Agent 研发应按任务属性配置能力,而非追求单一通用模板。
实验设计:把“有效”变成可复现证据
实验矩阵设计
课程建议将 Agent 实验拆成 “能力变量” 与 “系统变量” 两组:能力变量包括 reasoning budget、memory 策略、planning 粒度;系统变量包括工具延迟、缓存命中率、并发策略和失败重试规则。只有同时控制两组变量,实验结论才有解释力。
最小可复现实验单元
- 固定任务集合与数据版本;
- 固定工具接口与权限边界;
- 固定模型版本与温度参数;
- 记录完整轨迹与中间状态。
| 实验项 | 对照设置 | 主指标 | 副指标 |
|---|---|---|---|
| Reasoning budget | 2k / 6k / 12k tokens | 任务成功率 | 单任务成本 |
| Memory policy | 无记忆 / 检索记忆 / 分层记忆 | 长任务完成率 | 错误恢复时长 |
| Planning policy | 静态计划 / 动态重规划 | 平均步数 | 无效动作率 |
| Verification depth | 终局校验 / 步骤校验 / 双层校验 | 正确率 | 延迟 |
失败分类与归因方法
没有统一失败分类,实验就会陷入 “调参玄学”。推荐把失败划分为四类:感知失败、推理失败、执行失败、验证失败。每类失败对应不同修复动作,避免 “所有问题都加大模型” 的低效路径。
失败归因要做到“可执行”
归因结果应能直接映射到工程动作:
- 感知失败 \(\rightarrow\) 强化解析器与页面状态检查;
- 推理失败 \(\rightarrow\) 调整 reasoning 模板与反思触发;
- 执行失败 \(\rightarrow\) 工具封装与重试策略优化;
- 验证失败 \(\rightarrow\) 扩展校验器覆盖与错误阈值。
避免“成功样本偏见”
如果只分析成功轨迹,系统会误判自身鲁棒性。应优先分析高损失失败样本(高成本、长链路、不可恢复),这些样本决定生产可用性上限。
线上迭代节奏
课程并不建议一次性上线大改。更稳妥的路径是 “影子模式(shadow mode)\(\rightarrow\) 小流量灰度 \(\rightarrow\) 全量发布”。每个阶段都应有明确回滚条件,并持续监控任务级别 SLO。
线上监控建议
- 成功率下探阈值与自动降级策略;
- 成本突增阈值与预算闸门;
- 工具错误率阈值与熔断机制。
本章小结
实验设计的目标不是“证明系统很好”,而是“定位系统为何好/为何坏”。可复现、可归因、可回滚是 Agent 实验体系的三条底线。
部署蓝图:技术栈与组织协同
参考技术栈
结合课程观点,一个可落地的 Agent 栈可以分为六层:接口层、编排层、记忆层、工具层、验证层、观测层。每层都应具备最小自治能力,并通过稳定协议通信。
| 层级 | 核心职责 | 关键产物 |
|---|---|---|
| 接口层 | 接收任务、权限校验、输出格式化 | Task spec、权限上下文 |
| 编排层 | 任务分解、路由、重规划触发 | Action graph、执行计划 |
| 记忆层 | 分层读写、压缩、淘汰、冲突处理 | 记忆索引与摘要 |
| 工具层 | 统一工具协议、错误封装、重试 | 可调用 API catalog |
| 验证层 | 终局与步骤验证、风险拦截 | 验证报告与风险标签 |
| 观测层 | 轨迹追踪、指标聚合、告警 | Trace、Dashboard、审计日志 |
组织协同模型
Agent 项目常见组织问题是:模型组、平台组、业务组各自优化局部目标。课程启发是建立 “任务成功率” 为统一北极星指标,并让不同团队共享同一套轨迹数据和失败分类。
组织协同的三条实践
- 统一事件 schema,避免各组口径不一致;
- 统一回滚机制,确保线上风险可控;
- 统一优先级框架,以高损失失败优先修复。
治理与合规
在企业部署中,Agent 不只是技术问题,还涉及权限最小化、敏感数据处理、审计留痕和责任归属。课程建议在系统层内置治理能力,而不是上线后补丁式合规。
治理能力必须前置
- 没有权限分层,工具调用会出现越权风险;
- 没有审计日志,事故后难以完成责任追踪;
- 没有红线规则,模型异常可能快速扩散。
部署前检查清单
- 是否具备任务级回滚与人工接管?
- 是否具备步骤级日志与可复放轨迹?
- 是否具备预算闸门与故障熔断?
- 是否完成敏感场景红队测试?
本章小结
Agent 部署是 “技术 + 组织 + 治理” 的联动工程。只有将三者合并设计,系统才能稳定穿越从 Demo 到生产的断层。
术语与设计模式速查
核心术语对照
为避免团队在跨模块协作时出现语义偏差,本讲可提炼出一套最小术语表。建议在项目文档中固定这些术语定义,减少 “同名异义” 导致的沟通成本与实验偏差。
| 术语 | 课程语境中的含义 | 实现时的注意点 |
|---|---|---|
| Reasoning action | 用于改进后续动作质量的中间思考步骤 | 需绑定触发条件和预算上限 |
| Reflection | 对既有轨迹进行自检并尝试修正 | 需要失败信号,否则易空转 |
| Replanning | 因环境偏差而重写计划 | 要明确重规划阈值,避免频繁抖动 |
| Working memory | 当前步骤所需的短时上下文 | 控制容量,避免挤占关键信息 |
| Episodic memory | 任务过程中的事件与结果记录 | 需附来源和时间戳,支持复盘 |
| Semantic memory | 稳定事实与知识库内容 | 管理版本与冲突,防止旧知识污染 |
| Procedural memory | 可复用策略、流程和模板 | 维护触发条件,避免错误泛化 |
| Verifier | 验证中间或终局正确性的机制 | 验证器本身也需持续评估 |
常见设计模式
课程实践可进一步沉淀为几种高频设计模式。它们不是银弹,但能显著降低从研究原型到生产系统的迁移摩擦。
四种常用设计模式
- Plan-Execute-Verify:先计划、后执行、再验证,适合可验证任务;
- Think-Act-Reflect:推理与执行交替,适合动态环境;
- Retrieve-Reason-Write:先取证再推理,适合知识密集任务;
- Shadow-to-Production:先影子评测再灰度上线,适合高风险业务。
模式复用时的边界条件
同一模式在不同任务分布下的效果可能相反。上线前应验证:任务可验证性、工具稳定性、延迟预算、权限约束是否满足模式前提。
本章小结
统一术语和设计模式能减少团队协作摩擦,提高实验可比性与系统可维护性。这也是 Agent 工程从“个体经验”走向“组织能力”的关键一步。
开放挑战与研究路线
课程给出的长期挑战
课程后段将挑战集中在三个层面:认知层(更可靠的推理)、系统层(更稳健的记忆与规划)、组织层(更可信的评测与部署)。
未来两年的关键技术杠杆
- 可验证推理:把 reasoning 结果与形式化检查器连接;
- 记忆治理:解决污染传播、版本冲突和过期淘汰;
- 规划泛化:提升跨任务迁移能力,降低每任务重调成本。
为何“Reasoning + Memory + Planning”必须联合优化
单点优化很容易出现木桶效应:推理增强但记忆劣化,会放大错误;规划增强但验证器弱,会更快走偏。联合优化的目标是系统级稳定收益,而非局部峰值。
部署中的现实约束
企业场景往往存在严格延迟预算、权限边界和审计要求。研究原型若忽略这些约束,迁移到生产时会出现显著性能回撤。
本章小结
课程给出的路线不是追逐单一 SOTA,而是建设可验证、可回滚、可扩展的 Agent 系统栈。长期竞争力来自系统工程能力。
总结与延伸
全讲要点汇总
| 能力模块 | 课程核心判断 | 工程动作 | 主要风险 |
|---|---|---|---|
| Reasoning | 为了更好行动,不是为了更长思维链 | 引入反思、重规划与动作校验 | Token 成本与幻觉放大 |
| Memory | 分层记忆是长任务稳定性核心 | 设计读写压缩淘汰策略 | 记忆污染与检索错配 |
| Planning | 动态规划优于静态清单 | 监控偏差并触发重规划 | 过度规划导致效率下降 |
| Multi-agent | 条件性增益,不是默认增益 | 先定协议,再增角色 | 通信开销与协作漂移 |
| Evaluation | 必须看全链路过程指标 | 建立 tracing 与统一 schema | 只看终局分数导致误判 |
一句话总结
Language Agent 的下一阶段竞争,不是谁能做出更炫的 demo,而是谁能把推理、记忆和规划做成可验证、可运维、可扩展的工程系统。
延伸阅读
- Yao et al., ReAct: Synergizing Reasoning and Acting in Language Models
- Shinn et al., Reflexion: Language Agents with Verbal Reinforcement Learning
- Park et al., Generative Agents: Interactive Simulacra of Human Behavior
- Wang et al., Voyager: An Open-Ended Embodied Agent with LLMs
- OpenAI / Anthropic 关于 Agent tool-use 与 evaluation 的官方技术博客
进一步实践建议
- 在单体 Agent 上先完成 “可观测 + 可回滚” 的最小闭环,再引入多智能体;
- 先建设任务级验证器,再扩大 reasoning budget;
- 将记忆操作显式 API 化,避免隐式上下文堆积;
- 对生产场景建立人工接管与降级策略,优先保障可控性。