[LLM Agents SP25] Multimodal Agents: Perception to Action
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于 Caiming Xiong 授课内容整理 |
| 来源 | Berkeley RDI |
| 日期 | 2026-04-02 |
![[LLM Agents SP25] Multimodal Agents: Perception to Action](cover.jpg)
从基准饱和到多模态 Agent:问题空间为什么被重写
主讲脉络与核心判断
本讲由 Salesforce AI Research 的 Caiming Xiong 主讲,主线非常清晰:传统文本任务基准在过去几年接近饱和,下一阶段的挑战不再是 “离线答题”,而是 “在真实数字环境中持续完成任务”。这一定义把研究对象从静态 NLP 任务,切换为可交互、多步骤、跨应用的 Agent 系统。
从 “会回答” 到 “会做事”
在多模态 Agent 范式里,模型价值不只是输出一句话是否正确,而是能否稳定地完成一个真实工作流:读界面、理解状态、规划动作、执行操作、校验结果、再迭代。这个闭环才是生产环境里的真正门槛。
为什么 “多模态” 不再是可选项
讲者把多模态 Agent 定义为 Vision-Language-Action(VLA)系统。原因很直接:现实工作流并不是纯文本 API,更多是 GUI、网页、桌面软件、移动端界面,甚至外设交互。Agent 只有同时具备视觉理解、语言推理和动作生成能力,才可能接管复杂流程。
多模态 Agent 的输入输出对比
- 输入从 “单轮文本” 变成 “用户指令 + 屏幕截图 + 可访问性树 + 环境状态”;
- 输出从 “自然语言答案” 变成 “可执行动作序列”;
- 评估从 “准确率” 变成 “任务完成率、轨迹质量、步骤效率与鲁棒性”。

常见误解:把 “会用工具” 当成 “可部署 Agent”
演示里一次成功并不代表系统可上线。生产级 Agent 关注的是长期稳定性:错误恢复、任务中断处理、跨应用状态一致性、权限边界和审计可追踪性。这些都不是单个 benchmark 分数能覆盖的。
本章小结
多模态 Agent 的研究重点已从模型 “答题能力” 转向 “环境交互能力”。这一转变决定了后续必须同时建设三层基础:真实环境 benchmark、可扩展数据管线、可执行的模型架构。
应用图谱:数字工作流如何成为 Agent 的主战场
任务形态:单应用操作到跨应用编排
讲者强调,实际用户任务通常不是一个页面一次点击,而是跨工具流程。例如:浏览器检索信息、表格整理数据、邮件发送结果、文档归档记录。多模态 Agent 需要处理持续状态与任务上下文,而不是短期指令响应。
真实世界任务的四个特征
- 长链路:常常超过 20--50 步;
- 跨界面:浏览器、桌面、终端、Office 工具混合出现;
- 非确定性:页面加载、弹窗、网络波动导致状态变化;
- 目标开放:很多任务存在多条可行路径,不是单一标准答案。
Agent 能力分层:感知、规划、执行、验证
课程把 Agent 拆成能力栈,而不是一个黑盒模型。感知层负责理解界面与语义对象;规划层决定下一步子目标;执行层输出可执行动作;验证层判定任务是否完成并修正轨迹。这种分层能更好定位系统瓶颈。
为什么多模态 Agent 需要 “过程可见性”
当任务失败时,团队必须知道问题在感知、规划还是执行。如果所有失败都被归因到 “模型不够强”,就无法制定有效优化策略。可观测性是 Agent 迭代效率的核心。
数字场景优先,物理场景随后
从落地节奏看,讲者明显把数字环境(web、desktop、mobile)作为优先级更高的方向。原因是反馈闭环更快、评测脚本更容易搭建、成本更可控。物理世界 Agent 虽然重要,但数据与评测基础设施更重,迭代速度更慢。
不要过早把机器人路径与 GUI Agent 混为一谈
两者都属于 Agent,但工程约束完全不同。GUI Agent 的瓶颈在界面理解和任务编排;物理 Agent 还叠加感知误差、安全约束和执行器稳定性。混合讨论会掩盖问题本质。
本章小结
课程把应用问题定义为 “跨应用、多步骤、可恢复” 的长期任务。由此引申出的工程要求是:先把数字任务闭环做深,再向更复杂场景扩展。
Benchmark 体系升级:从网页基准到 OS-World
现有基准的价值与边界
讲者回顾了 Mind2Web、WebArena、VisualWebArena 等基准。这些工作推动了 Web Agent 研究,但它们的环境覆盖、任务类型和可扩展性仍不足以代表真实 “computer use” 场景,尤其是跨应用与开放式目标任务。
典型不足
- 任务分布偏网页导航,覆盖面窄;
- 许多任务存在隐式模板化路径,容易被策略过拟合;
- 对桌面应用、文件系统、跨软件流程支持不足;
- 难以承载 “开发-测试-评测” 一体化闭环。
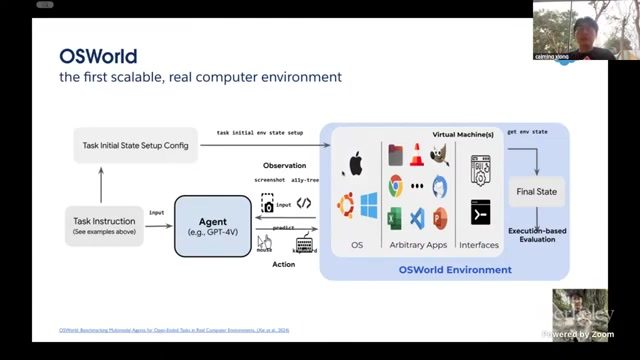
OS-World 的设计目标
OS-World 被定位为更通用的真实计算机环境:在虚拟机中提供可交互桌面与应用生态,支持研究者定义任务、执行 Agent、收集轨迹、运行评测脚本,并且保留扩展空间。
OS-World 的三项关键属性
- 真实性:接近真实操作系统与应用行为;
- 可扩展性:可持续新增任务与应用组合;
- 可评测性:每个任务可绑定脚本化验证逻辑。
对比视角:为什么 OS-World 更接近生产问题
| 维度 | 传统 Web 基准 | OS-World |
|---|---|---|
| 环境覆盖 | 主要网页域 | 网页 + 桌面应用 + 系统交互 |
| 任务形态 | 偏导航与表单 | 跨应用、多步骤、开放式流程 |
| 评测方式 | 页面结果导向 | 脚本验证 + 部分完成奖励 |
| 扩展能力 | 新任务构建成本较高 | 支持系统化新增任务与配置 |
| 工程适配 | 偏离线评测 | 开发、训练、评测一体化 |
评测迁移风险
如果团队只在单一 benchmark 上优化,模型容易对评测脚本形成 “策略投机”。课程建议在多环境、多任务族上做交叉验证,以防止 benchmark overfitting。
本章小结
OS-World 的意义不只是多一个 benchmark,而是把 Agent 研究从 “题库竞争” 推向 “环境工程”。这为后续的数据与模型设计提供了统一实验底座。
OS-World 的执行机制:观察、动作与交互循环
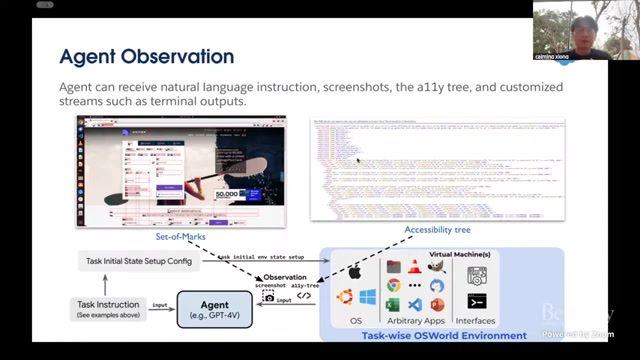
观察空间设计
课程讲解了多源观察输入:屏幕截图、可访问性树(accessibility tree)、终端输出和自定义状态流。不同 Agent 可按需求选择视觉主导或文本主导的输入组合。
为什么截图 + 可访问性树要同时保留
截图提供整体视觉上下文,但结构化程度低;可访问性树具备对象层级与属性信息,便于精准定位和可解释操作。二者互补能显著提高动作生成稳定性。
动作空间与执行接口
动作由可执行指令表达,覆盖点击、输入、滚动、快捷键与组合操作。Agent 并非直接输出 “建议”,而是生成可在虚拟机中执行的行为代码。
动作格式标准化的价值
统一动作格式能同时服务三件事:训练数据对齐、执行器稳定运行、评测脚本可复现。没有标准动作层,跨模型比较和大规模数据积累都会失败。
交互循环
系统循环为 “接收观察 \(\rightarrow\) 规划动作 \(\rightarrow\) 环境执行 \(\rightarrow\) 新观察”。任务在达到目标、触发失败条件或到达最大步数时结束。这个循环把 Agent 训练目标从单步预测扩展为序列决策。
obs = env.reset(task_config)
for step in range(max_steps):
action = agent.predict(obs, instruction)
obs, reward, done, info = env.step(action)
if done:
break
工程细节:安全与可复现
课程强调了虚拟机隔离和任务配置文件的重要性。研究环境必须可重置、可记录、可重放,这样才能做稳定对比实验并诊断失败轨迹。
常见失败点
真实环境里最易被忽略的是 “状态漂移”:缓存、登录态、弹窗与后台进程导致同任务在不同运行中行为不一致。必须通过环境快照、初始化脚本和日志追踪降低漂移影响。
本章小结
OS-World 的核心不是界面截图本身,而是 “结构化观察 + 标准动作 + 可重放执行” 的闭环设计。这让多模态 Agent 研究进入可工程化迭代阶段。
评估与奖励:如何把开放任务变成可训练目标
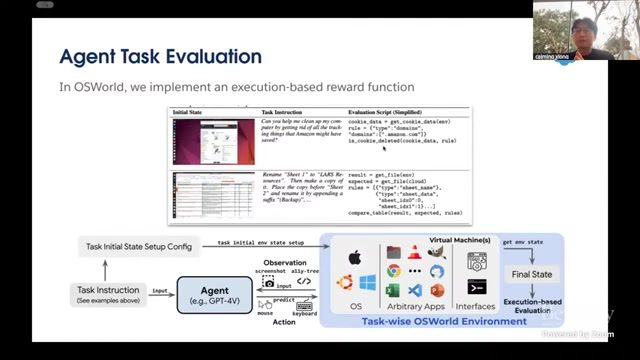
执行式评估(Execution-based Evaluation)
课程采用脚本化执行评估,而非人工主观打分。任务完成后,由验证脚本检查文件、页面状态、输出内容或系统变量,给出完成度判断。
开放任务也可以做可计算评估
即使任务有多条路径,只要结果状态可验证,就能构建自动评测。关键是把 “任务意图” 映射为 “可检查条件”,例如文件存在性、字段值、页面元素状态、命令返回值等。
部分完成奖励与难度分层
课程强调不应只用二元成败。对复杂任务,部分完成分数能更细粒度反映进步,并显著改善训练信号稀疏问题。实践中应配套难度分层,避免模型长期停在低阶子任务。
奖励函数设计建议
- 将目标拆成关键里程碑,设置分段奖励;
- 对破坏性动作增加惩罚,约束风险行为;
- 对无效重复操作做退火处理,抑制循环轨迹;
- 评估脚本版本化管理,保证可复现性。
评测体系的鲁棒性要求
评测脚本本身也可能被 “攻击” 或绕过。课程建议在脚本层加入异常分支、边界检查和反作弊约束,避免模型学习到与任务目标无关的投机策略。
Reward Hacking 是真实风险
如果奖励只覆盖局部状态,Agent 可能学会 “骗分” 而非 “完成任务”。例如通过界面缓存制造假完成状态,或触发脚本漏洞规避关键步骤。评估设计必须先于模型迭代。
本章小结
Agent 训练的上限很大程度上由评估系统决定。执行式评估、部分奖励和脚本鲁棒性共同决定了模型能否在开放任务上稳定进步。
数据瓶颈:从人工标注到教程驱动轨迹生成
为什么轨迹数据是核心稀缺资源
讲者指出,多步交互轨迹远比单轮指令数据昂贵。每条高质量轨迹通常包含复杂状态切换、工具调用与错误恢复,纯人工采集难以支撑规模化训练。
数据稀缺不在 “文本数量”,而在 “可执行轨迹质量”
Agent 数据的价值来自三点:任务上下文完整、动作可执行、结果可验证。缺任一项,训练增益都会显著下降。
教程驱动(Tutorial-driven)数据构造
课程提出从互联网教程中抽取高价值任务模板:先做教程收集与结构化解析,再转为标准化任务描述与步骤候选,最后由 Agent 在环境中执行生成轨迹。
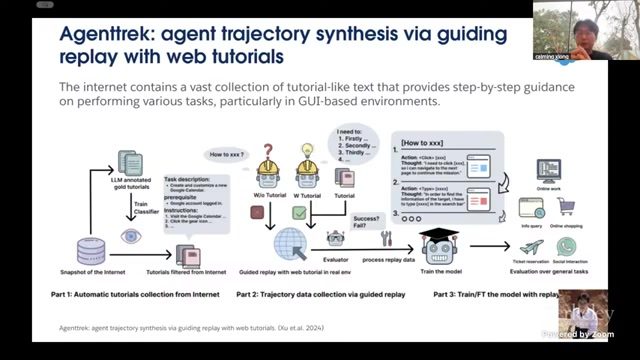
教程驱动方案的优势
- 任务多样性高:覆盖真实用户问题分布;
- 可迁移性好:同类教程可映射为不同环境任务;
- 成本可控:减少纯人工逐步标注;
- 易扩展:可与自动评估脚本打通形成闭环。
质量控制:从 “可运行” 到 “可学习”
教程文本并不天然等于训练数据。课程强调多级过滤:任务可执行性检查、轨迹一致性检查、错误步骤剔除、低信息样本降权。高噪声数据会显著拉低训练效率。
不要把 “采集成功” 误判为 “数据可用”
很多轨迹虽然执行完毕,但对模型学习几乎无增益,比如重复模板路径、缺少关键决策步骤、动作与观测对齐错误。数据治理必须进入训练主流程,而非离线补丁。
本章小结
课程给出的数据路线是 “自动采集 + 结构化治理 + 脚本验证”。这条路线不追求绝对纯净,而追求在可控成本下持续提升有效样本密度。
合成数据与 Action Calling:构建可扩展训练飞轮
从感知任务到动作任务的迁移
讲者强调,仅靠视觉理解(看懂界面)不足以形成强 Agent,必须把能力迁移到 “调用动作”。因此课程引入合成数据管线,把图像问答、OCR、定位、流程推理转化为动作可执行样本。
Action Calling 的本质
Action Calling 不是额外功能,而是把模型输出空间从 “描述” 切换到 “执行”。这要求训练数据同时包含意图、推理路径、动作格式与执行反馈。
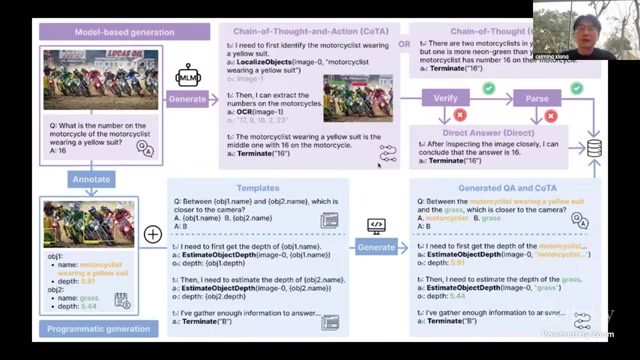
典型合成流程
- 采样任务场景与界面状态;
- 构造问题与目标(含定位、读取、操作、验证);
- 使用模型生成候选推理与动作序列;
- 借助执行器和评测器筛选高质量样本;
- 进入分阶段训练并持续回流失败样本。
为什么分阶段训练有效
课程中多次提到 “先学看,再学做,再学长期策略”。如果一开始就端到端学习长链路动作,模型更易陷入高方差和局部最优。分阶段可降低优化难度并提升样本利用率。
合成数据的边界
合成样本虽能扩规模,但分布偏差不可避免。课程建议保持真实轨迹与合成轨迹的比例平衡,并持续做线上任务回归,避免模型只在合成分布内表现良好。
合成数据三大风险
- 语义漂移:目标描述与真实任务意图不一致;
- 动作幻觉:生成看似合理但不可执行的操作;
- 偏差累积:模型生成的数据反过来强化自身错误模式。
本章小结
合成数据的正确用法是 “补充与加速”,不是替代真实交互数据。课程给出的关键经验是:把执行验证作为合成流程的硬约束。
模型设计:统一感知、规划与执行的多阶段架构
现有 GUI Agent 的关键短板
讲者归纳了当前系统的三类问题:视觉 grounding 不稳、长程规划弱、跨平台泛化差。很多模型在短任务上可用,但在高复杂度任务中会快速退化。
三类能力缺口
- Grounding:看到了但定位不准,或目标解析歧义;
- Planning:会执行单步,但缺少全局子目标管理;
- Generalization:换界面、换任务模板后性能骤降。
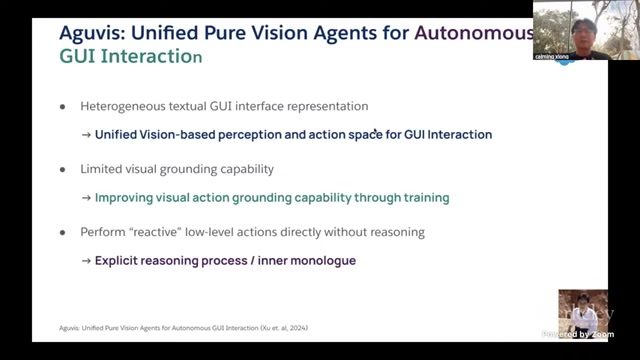
课程提出的整合思路
从字幕可见,讲者强调通过统一 AR 风格的生成范式,将视觉理解、推理链(monologue/reasoning trace)和动作生成纳入同一训练接口。这样可减少多模型拼接带来的接口损耗。
多阶段训练的工程收益
- 阶段 1:强化视觉 grounding 与界面语义理解;
- 阶段 2:引入推理链与规划信号,提升长程决策;
- 阶段 3:对齐执行策略与奖励反馈,优化任务完成率。
Planner 信号的引入
课程后段反复提到 planner 对难任务收益显著。直观上,planner 不是替代动作模型,而是提供可解释的中间结构,让模型在长任务中减少盲目试探。
Planner 不等于 “额外冗余”
若任务本身是长链路且状态复杂,缺 planner 往往意味着更多无效动作与回退。额外规划开销通常小于错误执行成本。是否使用 planner 应按任务复杂度分层决策。
本章小结
模型架构的关键不在参数规模,而在 “统一接口 + 分阶段训练 + 规划信号”。这三点共同决定了系统在高复杂度任务中的稳定性。
实验结果与可操作结论
结果解读:趋势比绝对数值更重要
课程展示了在多项 benchmark 上的提升趋势,尤其在更难任务和在线设置下,加入规划与更强训练数据治理后效果更稳。即便具体分数随配置变化,趋势仍非常一致。
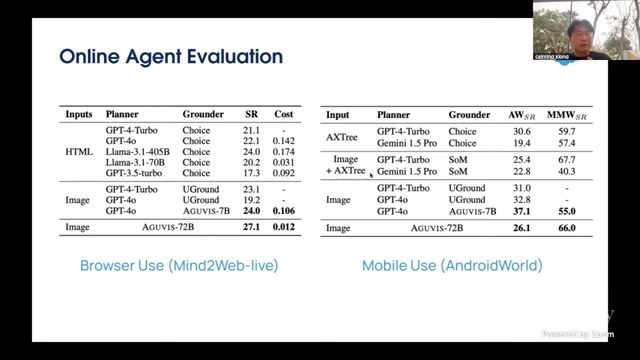
可复用的三条工程经验
- 先把评估与环境打稳,再谈模型迭代速度;
- 数据治理优先级不低于模型升级;
- 对复杂任务,规划信号通常是 “必要条件” 而不是 “锦上添花”。
落地指标建议
| 指标类别 | 建议指标 | 使用场景 |
|---|---|---|
| 任务结果 | 完成率、部分完成率、失败类型分布 | 评估产品可用性 |
| 轨迹质量 | 平均步数、重复动作率、回退率 | 诊断规划质量 |
| 系统稳定性 | 重跑一致性、异常中断恢复率 | 评估生产可靠性 |
| 数据闭环 | 失败样本回流比例、修复后提升幅度 | 衡量迭代效率 |
不要只看 “总完成率”
单一指标会掩盖问题。比如完成率上升可能来自简单任务占比增加,而不是复杂任务能力提升。课程建议至少按任务难度、任务类型、环境类型做分层统计。
本章小结
本讲结果最有价值的部分是方法论:环境、评估、数据、模型四者必须同时推进。任何一环短板都会让系统在真实任务上失稳。
工程落地路线图:从研究原型到生产系统
阶段一:可复现实验平台
先构建可重放环境、统一动作协议、标准评测脚本。阶段目标不是追求最高分,而是建立可诊断、可回归、可扩展的实验底座。
阶段二:数据飞轮
以真实失败任务为核心,持续回流到数据构造与训练流程。教程驱动与合成数据并行推进,但始终保持执行验证约束,防止数据分布漂移。
阶段三:生产守护
加入权限控制、操作审计、异常回滚、人工接管机制。只有当 “可观测性 + 可恢复性” 具备,Agent 才能从 demo 进入业务关键链路。
组织层面的协同要求
多模态 Agent 不是单模型团队可以独立完成的项目。需要环境工程、评估工程、数据工程、模型训练和产品安全团队协作,形成统一发布节奏。
一句话落地原则
“先把失败过程看清楚,再去追求更高分数。” 这比盲目堆参数或堆样本更能提升真实生产力。
本章小结
落地路径应遵循 “平台先行、数据飞轮、生产守护”。课程的核心价值在于给出了一条可执行、可扩展、可审计的 Agent 工程路线。
失败案例与调试手册:把不可用系统变成可迭代系统
失败类型分层:先分桶再修复
在多模态 Agent 项目里,失败不是例外而是常态。课程隐含的一个关键工程思想是:不要直接盯住 “最终失败”,而要先把失败拆成可修复子类。只有当失败类型被分桶,优化动作才会高效。
建议的四层失败分类
- 感知失败:没看懂界面、没读到关键文本、目标对象定位错误;
- 规划失败:子目标顺序错、漏步骤、重复步骤过多;
- 执行失败:动作格式对但上下文不匹配,或接口调用失败;
- 验证失败:任务已接近完成,但校验脚本与目标定义不一致。
为什么 “失败分桶” 会直接影响训练效率
如果所有失败样本都被统一回流,会造成噪声放大。分桶后可以按问题类型定向补数据:感知失败补 grounding 与 OCR 样本,规划失败补长链路推理样本,执行失败补动作约束样本,验证失败补脚本鲁棒性测试样本。
调试闭环:日志、回放、对照实验
课程内容对应的工程实践可以抽象为三步:第一步抓全量日志,第二步做轨迹回放,第三步做最小对照实验。对照实验的目标不是追求最佳分数,而是确认某个改动是否真实减少了某类失败。
| 阶段 | 关键操作 | 输出物 |
|---|---|---|
| 日志采集 | 保存观察、动作、环境状态、评测脚本输出 | 可定位失败发生点 |
| 轨迹回放 | 按时间序列回放 Agent 行为与界面变化 | 失败原因初步归因 |
| 对照实验 | 单变量替换模型/提示/动作约束/脚本版本 | 可验证的修复证据 |
避免 “一次改很多”
当模型、数据、动作格式、评估脚本同时变化时,几乎无法判断真实增益来源。课程强调工程化迭代,本质上要求每轮实验保持可解释和可回退。
高频问题实例
- 元素定位偏移:界面缩放变化导致坐标偏差,建议引入相对定位与对象锚点;
- 长任务退化:前半段正确、后半段崩溃,常见于上下文压缩和规划遗忘;
- 奖励欺骗:Agent 学会触发脚本漏洞而非完成任务,需要增强验证脚本鲁棒性;
- 跨应用状态错位:多个窗口与后台任务并行导致状态不一致,需要更强会话管理。
调试优先级排序
先修复 “高频 + 高损失” 类失败,再处理低频边缘问题。对生产系统而言,稳定性收益通常大于单次最优表现。
本章小结
失败调试不是附属工作,而是 Agent 迭代主流程。把失败结构化、可回放、可对照,才能形成真正的训练飞轮。
研究议程:下一代多模态 Agent 的三个突破口
突破口一:统一表示层
课程大量讨论了截图、可访问性树、动作代码和推理链,这些本质上都是不同模态的中间表示。下一阶段的重要方向是建立统一表示层,减少模态切换的信息损耗。
统一表示层要解决的问题
- 如何把视觉对象、语义对象、动作对象映射到同一结构;
- 如何让不同平台(web、desktop、mobile)共享抽象接口;
- 如何支持长链路任务中的状态压缩与可逆恢复。
突破口二:可验证长程规划
现有模型在复杂任务上仍容易陷入短视策略。课程后段强调 planner 贡献,说明 “可验证规划” 会成为下一轮竞争焦点:不是只生成计划,而是持续验证计划是否仍与环境状态一致。
规划能力的评测应从 “有无” 进化到 “质量”
未来评测不仅要问模型能否给出 plan,还要评估 plan 的可执行性、可更新性和错误恢复效率。没有这些指标,planner 容易沦为装饰性中间文本。
突破口三:安全与治理原生化
当 Agent 开始操作真实账户和业务系统,安全不可能后置。权限边界、审计日志、异常回滚和人类接管机制必须成为模型训练和部署时的原生约束,而非上线前补丁。
Agent 的最大风险不只是 “做不到”,而是 “做错且不可追溯”
如果系统缺少可审计链路,事故发生后无法复盘责任边界。课程虽然聚焦研究,但其环境与评估思想已经为治理原生化提供了实践基础。
未来 12 个月可执行任务清单
| 方向 | 建议任务 | 预期产出 |
|---|---|---|
| 统一表示 | 构建跨平台对象-动作中间层 | 降低迁移成本与动作错误率 |
| 规划优化 | 引入在线计划校验与重规划机制 | 提升长任务完成率 |
| 数据飞轮 | 失败样本自动分桶并回流训练 | 降低高频失败复现率 |
| 安全治理 | 建立权限模板、审计与回滚策略 | 支撑生产可控部署 |
本章小结
下一代多模态 Agent 的竞争,不会只看模型参数规模,而会看谁能把统一表示、长程规划和治理机制做成可复用工程能力。
总结与延伸
全讲总结表
| 主题 | 核心观点 | 工程动作 |
|---|---|---|
| 问题定义 | Agent 目标从答题转向真实任务闭环 | 建立环境交互评测而非仅离线评分 |
| Benchmark | OS-World 补齐真实计算机场景缺口 | 任务脚本化、环境可重放、结果可验证 |
| 数据体系 | 轨迹数据是主要瓶颈 | 教程驱动采集 + 合成增强 + 质量治理 |
| 模型体系 | 统一感知/规划/执行并分阶段训练 | 引入规划信号,强化 grounding 与长程决策 |
| 落地策略 | 生产可用性依赖可观测与可恢复 | 增加审计、回滚、权限和人工接管机制 |
进一步阅读
- OS-World 论文与项目文档(真实计算机环境 Agent benchmark)
- WebArena / VisualWebArena / Mind2Web(Web Agent 评测演进)
- GUI grounding 与 action modeling 相关工作(视觉定位到动作执行)
- 多模态 Agent 数据合成与轨迹筛选论文(可扩展训练数据管线)
- Agent 安全与审计实践(权限、回滚、可观测性)
延伸问题
- 如何设计跨应用任务的统一中间表示,减少平台耦合?
- 在在线生产环境中,如何平衡自动化效率与安全边界?
- 当任务目标不可完全脚本化时,评估系统如何与人工反馈协同?