CS224R Lecture 4: Actor-Critic 方法
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于公开课程资料整理 |
| 来源 | Stanford Online |
| 日期 | 2025 年春季 |
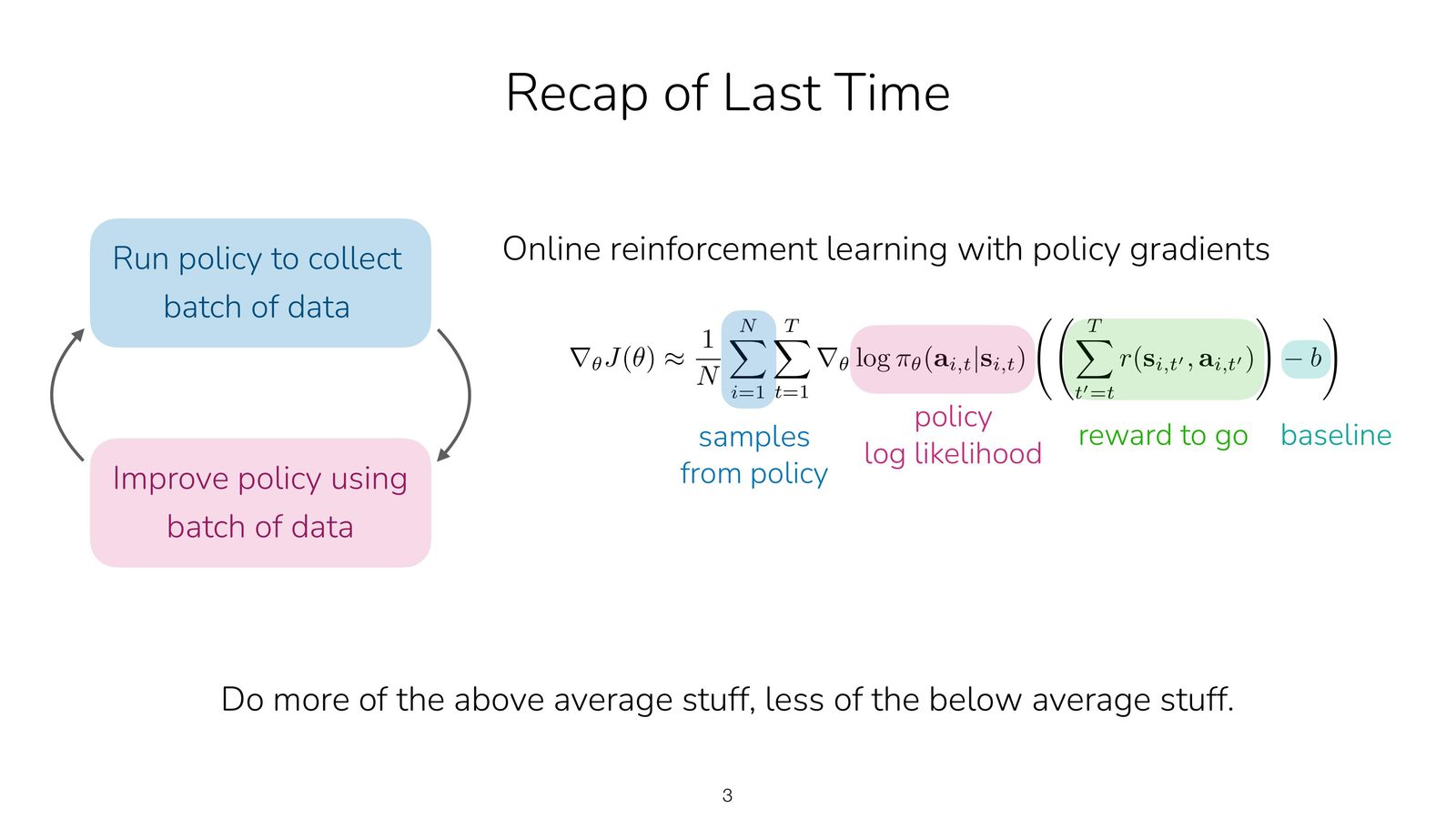
回顾:策略梯度的不足
策略梯度使用采样的 reward-to-go 来估计每个动作的好坏,但这种估计方差很大。
策略梯度的两个核心问题
- 数据利用不充分:稀疏奖励下,大部分轨迹的奖励为零,梯度信息很少。
- 高方差:采样 reward-to-go 是单次采样估计,噪声大。
核心改进思路:能否学习什么是好的、什么是坏的,而不是仅依赖采样估计?
本章小结
策略梯度的主要敌人是高方差与低效利用轨迹,构造一个学习的 critic 去估计优势函数可以显著改善这种现象,并为 Actor-Critic 系统的出现打下基础。
核心对象回顾
价值函数、Q 函数与优势函数
- 价值函数 \(V^\pi(s)\):从状态 \(s\) 出发遵循 \(\pi\) 的期望未来奖励。
- Q 函数 \(Q^\pi(s, a)\):从 \(s\) 执行 \(a\) 后遵循 \(\pi\) 的期望未来奖励。
- 优势函数 \(A^\pi(s, a) = Q^\pi(s, a) - V^\pi(s)\):动作 \(a\) 相对于策略 \(\pi\) 的平均表现好多少。
关键关系:\(V^\pi(s) = \mathbb{E}_{a \sim \pi(\cdot|s)}\left[Q^\pi(s, a)\right]\)
本章小结
\(V\)、\(Q\)、\(A\) 三个函数从不同角度描述策略的好坏。优势函数 \(A\) 特别有用,因为它直接衡量某个动作相对于策略平均水平的好坏。
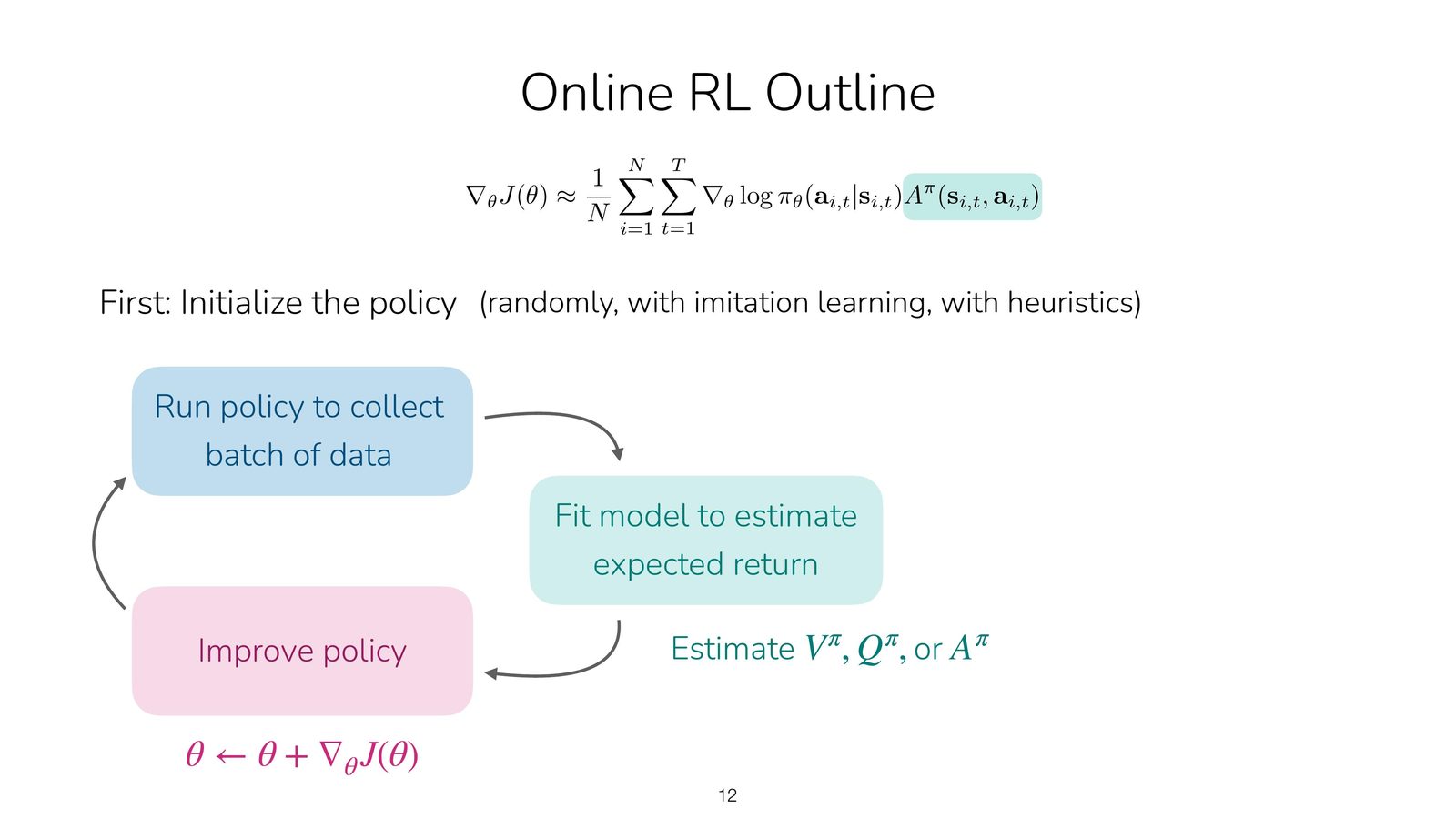
Actor-Critic 框架
用优势函数改进策略梯度
用 \(A^\pi\) 替代 reward-to-go:
更好的 \(\hat{A}\) 估计 \(\Rightarrow\) 更低噪声的梯度。
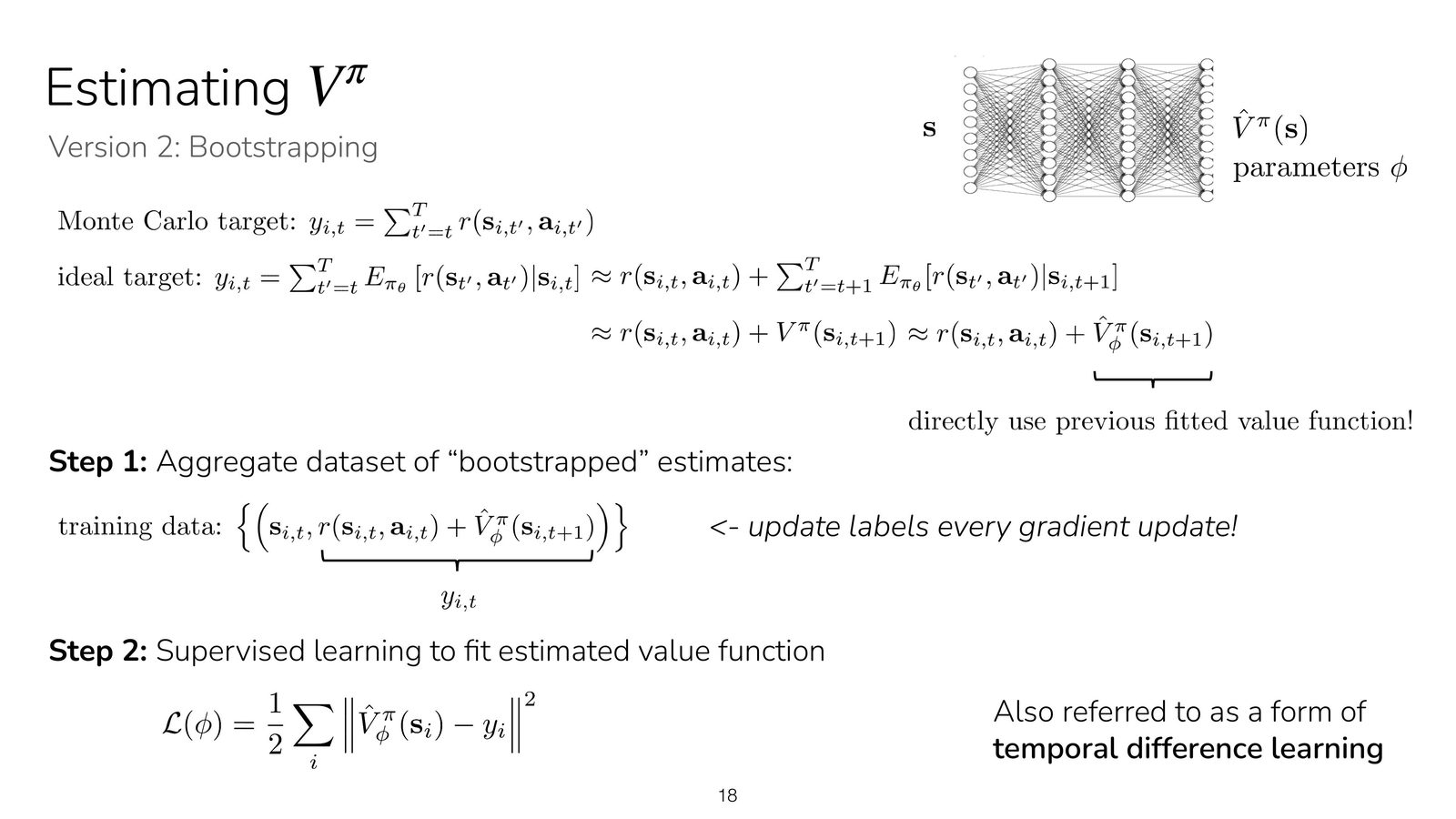
如何估计价值函数
只需拟合 \(\hat{V}^\pi\) 即可,因为:
这里利用了采样得到的 \(s_{t+1}\) 来近似期望。
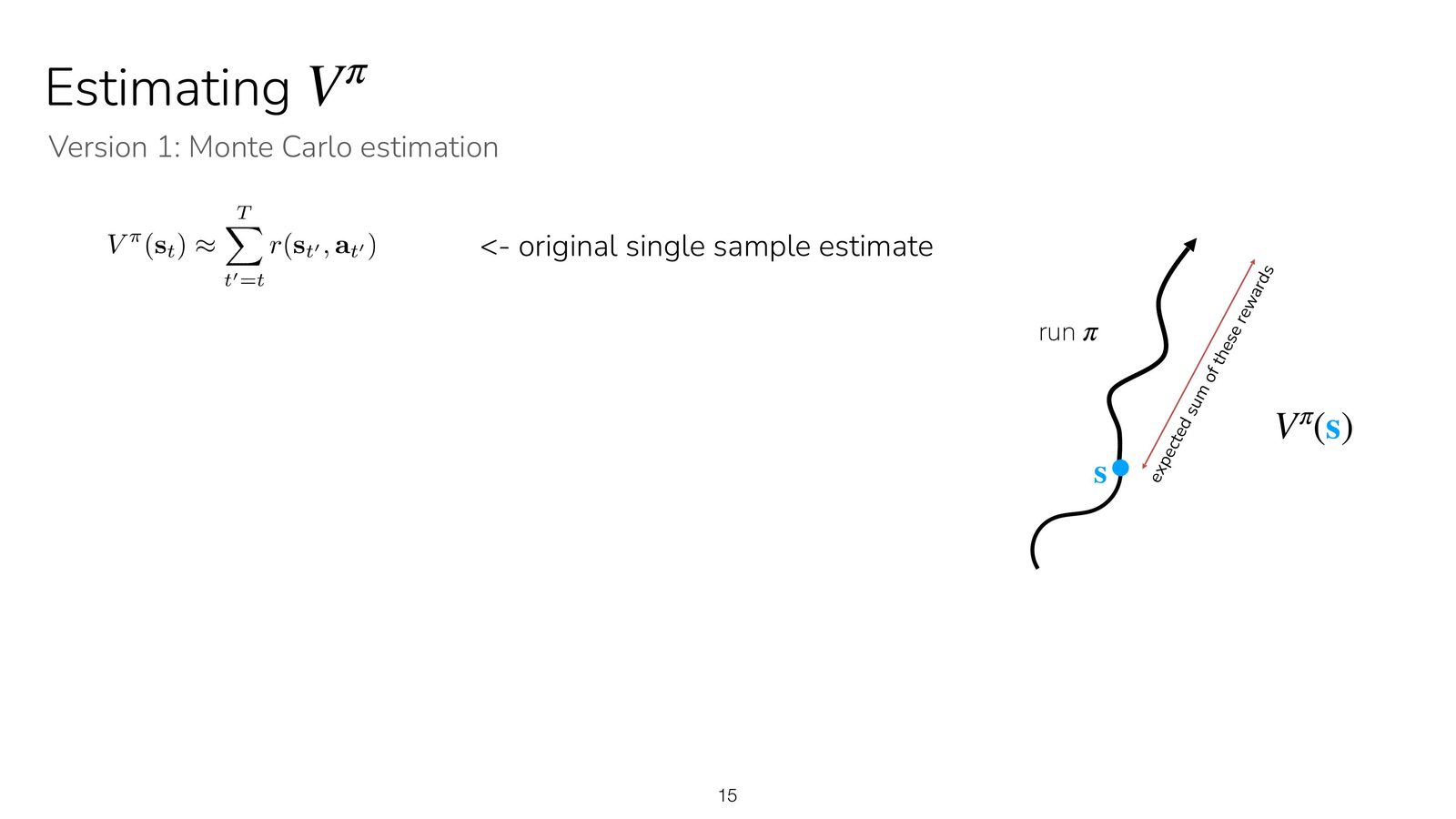
价值函数的拟合方法
方法 1:Monte Carlo 回归
直接用采样的累计奖励作为 target。无偏但高方差。
方法 2:Bootstrapped / TD 更新
用自身的估计作为 target(bootstrap)。低方差但有偏。
方法 3:n-step 回报
结合上述两者,使用 \(n\) 步实际奖励 + bootstrap:
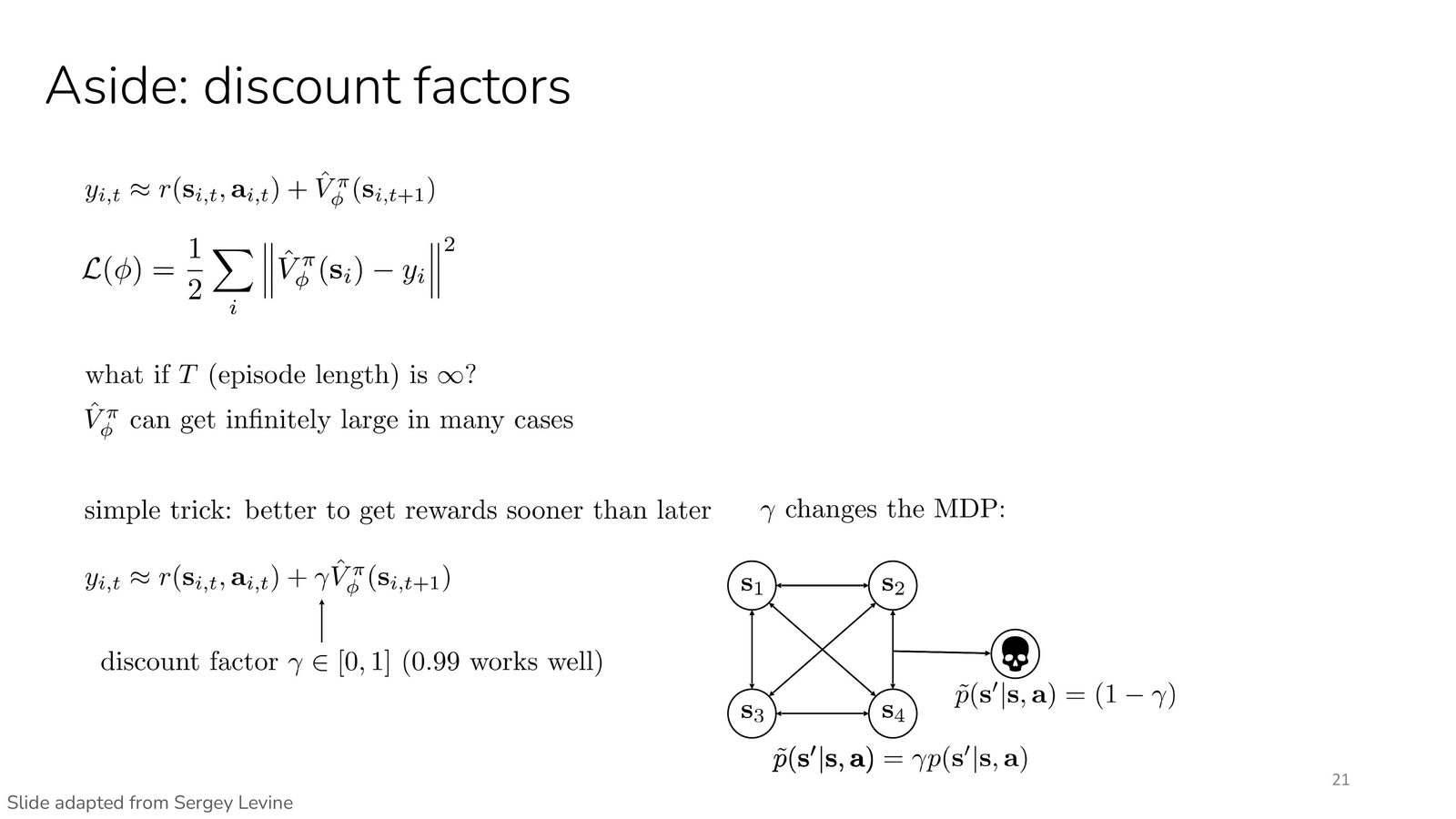
Bias-Variance Tradeoff
- Monte Carlo:无偏,高方差。
- TD (1-step bootstrap):有偏(因为 \(\hat{V}\) 不精确),低方差。
- n-step:在两者之间提供可调的平衡。
架构与数据流
图中可以看到一个典型的 Actor-Critic 循环:从当前策略生成动作,存入经验池;Critic 使用经验数据拟合价值函数或者 Q 值;Advantage 估计后发送回 Actor 做梯度更新。整个流程是异步的,但细粒度地保持数据一致性(fixed target network、延迟更新)是稳定性的关键。
Critic 作为 baseline 与正则项
Critic 不只是计算优势,它同时充当 baseline,并可通过正则项提升鲁棒性。例如,L2 正则化、value clipping 和 bootstrap target 的 moving average 都是避免 critic drift 的常见做法。
critic drift 造成的训练崩溃
Critic 若训练过快,会把价值函数拉到高估区域,导致 advantage 始终为正,Actor 会倾向于某些动作并迅速收敛到劣化策略。控制 critic 学习率和添加 target network 是避免这种 "pessimistic collapse" 的常用招数。
Probabilistic baseline vs learned critic
传统策略梯度用 episode average reward 作为 baseline,Actor-Critic 直接学一个参数化函数,更紧贴当前状态。学习式 critic 的优势在于可以处理长期依赖(如 bootstrapped n-step 回报)并主动修正偏差,提高样本效率。
Generalized Advantage Estimation
GAE 用一个指数衰减核融合多步回报,公式为:
其中 \(\lambda \in [0,1]\) 控制 bias-variance tradeoff。\(\lambda=0\) 退化为 1-step TD,\(\lambda=1\) 退化为 Monte Carlo。
GAE 的调度思路
实践中逐渐 anneal \(\lambda\) 从较低值走向 1,可以在训练早期保持低方差,在收敛期逐步吸收长时间依赖信息。结合 target network 和 \(\gamma\) 的 decay,还能避免 critic 过拟合短期 reward。
Actor-Critic 完整流程
- 运行策略收集数据
- 拟合价值函数 \(\hat{V}^\pi\)
- 估计优势 \(\hat{A}^\pi\)
- 用策略梯度更新策略 \(\pi_\theta\)
- 重复
本章小结
Actor-Critic 通过学习价值函数来估计优势,替代了策略梯度中噪声很大的采样 reward-to-go,显著降低了梯度方差。
稳定性、正则与调度
Entropy 与多样性正则
Entropy 项鼓励策略在更新阶段保留一定随机性,从而避免策略迅速收敛到次优动作。这在稀疏奖励或多模态动作空间尤为重要。
Entropy regularization 的实际量级
在 PPO / SAC 中常见做法是把 entropy bonus \(\beta\) 设为策略 loss 的 0.01 0.1,即保留 1% 10% 的 exploration energy。太小会陷入局部 optima,太大又会拖慢策略收敛。
Trust region 与 clipped objective
PPO 的 clipped objective:
其中 \(r_t(\theta) = \frac{\pi_\theta(a_t|s_t)}{\pi_{\theta_{\text{old}}}(a_t|s_t)}\)。
把 KL 约束或者 clip 机制当作 trust region,可以防止策略步幅过大。讲者提示:在 PPO 里监控 \(KL(\pi_{\theta_{\text{old}}}||\pi_\theta)\),一旦跳过阈值就退回到上一次 checkpoint。
Trust region vs clipping
TRPO 通过精确算梯度约束,计算量大;PPO 则把约束用 clip 近似,计算简单且易于并行,是当前主流首选算法。
调度与 target network
Critic 的 Target Network(如 SAC 的慢速权重)通过 Polyak averaging 让目标值平滑。例如:
较小的 \(\tau\) 值让 target network 更新缓慢,提高稳定性,但也可能在非平稳环境里反应迟钝。
Target network 更新太慢会跟不上策略
如果 \(\tau\) 设得过小,critic 会一直追随已经“过时”的 target,导致引导 Actor 估计过于乐观,对新样本适应慢。通常把 \(\tau\) 设在 0.005 0.05 之间。
本章小结
稳定性技巧(entropy、clip objective、target network)是 Actor-Critic 能否快速收敛的关键。监控 KL 与 advantage 的分布可以及时发现出界更新。
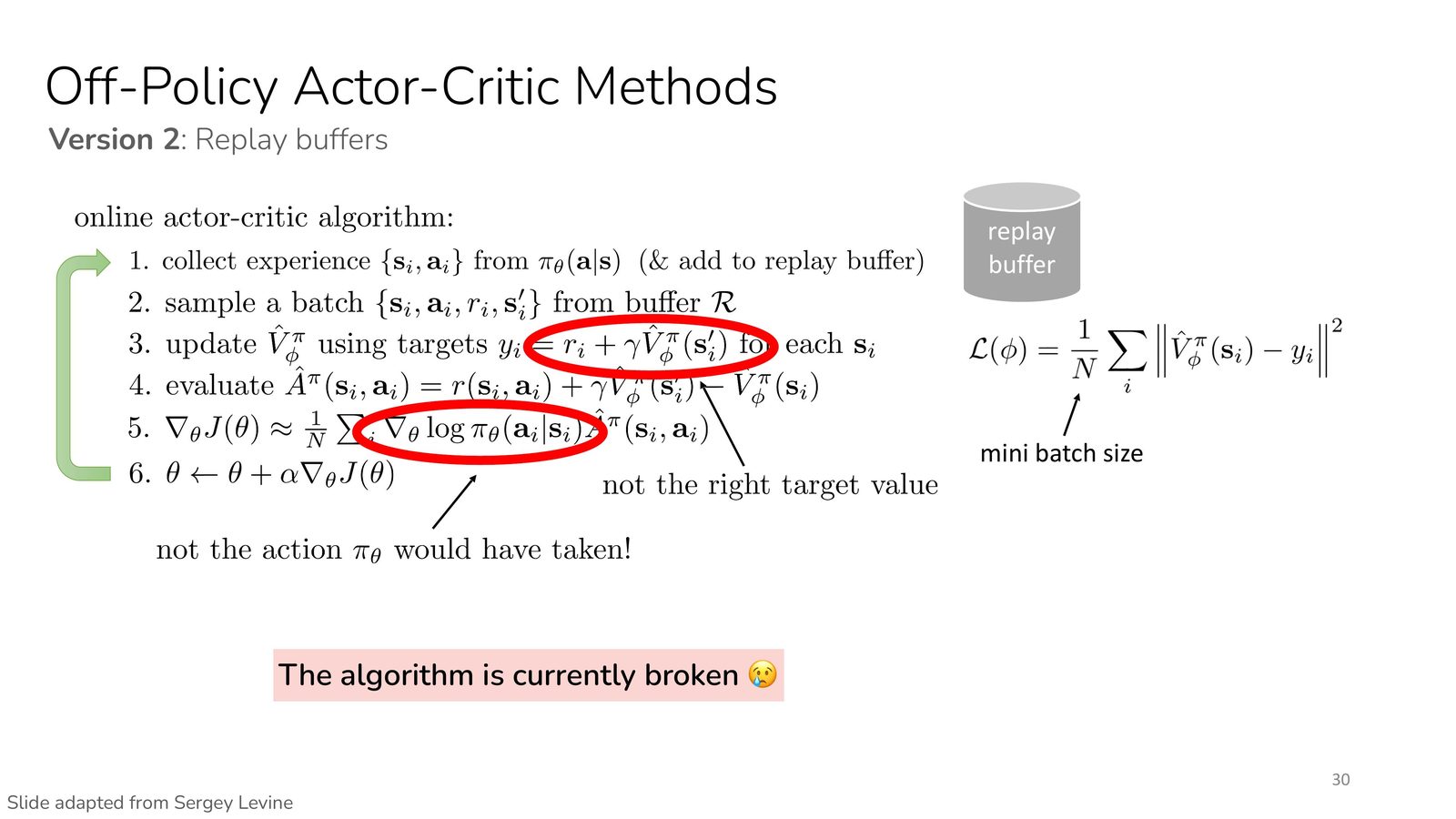
Off-Policy Actor-Critic 简介
当结合 importance weights 时,Actor-Critic 可以复用旧数据进行多步梯度更新。
但 importance weights 在新旧策略差异大时不稳定。下一讲将介绍如何用 KL 约束和 clipping 来解决这个问题。
本章小结
Off-policy actor-critic 通过 importance sampling 复用旧数据,但需要限制策略更新的步幅以保持稳定性。
工程实践与调参
Replay buffer 和数据采样策略
现代 off-policy Actor-Critic 模型往往使用优先级 replay buffer、frame stacking 和 multi-environment rollout。过往讲义中也反复强调:数据采样策略直接决定了 critic 的训练信号。
Prioritized replay 的小技巧
把 TD error 的绝对值作为 priority,在 sampling 时增加概率,并在 loss 中乘以 importance weight correction,确保 update 不会偏向高 error 样本。
Batching 与多步回报的实践
批量大小、采样频率与 n-step 的组合是基础调参方向。可以通过下表把常用组合总结出来。
| 配置项 | 常见取值 | 训练影响 |
|---|---|---|
| Batch size | 256–4096 transitions | 越大 variance 越低,但硬件吞吐是瓶颈 |
| n-step | 1–5 | 大步数偏差小但有 drift,常用 mix |
| Update frequency | 1 update per 1–4 steps | 更少 update 减少 off-policy bias |
| Replay ratio | 1–4 | >1 表示每次采样后更新多次,各步 learning rate 需对应减小 |
调参与故障排查
当训练出现 divergence,先看 three signals:critic loss、KL、reward curve。此外,常见的failure mode 有:
- Critic overestimate:回归失灵导致 advantage 恒正;
- Replay buffer stale:环境改变但 buffer 中数据仍旧;
- Exploration collapse:entropy 快速降为 0。
出现 divergence 时的快速复位流程
先把策略退回上一个 checkpoint,关闭 entropy decay,减小 learning rate,再逐步恢复。不要一口气加大数据量,否则会加速灾难。
本章小结
实践中,数据采样、batching 和超参调度构成 Actor-Critic 稳定训练的系统性问题。监控 replay ratio、entropy 和 critic loss 是调参的第一手数据。
主流 Actor-Critic 族与诊断
算法族与设计差异
| 算法 | Critic 类型 | 策略更新 | 适合场景 |
|---|---|---|---|
| PPO | V 的 soft target | clipped surrogate | 模型同步训练、CPU 集群 |
| A2C/A3C | 单步 V + entropy | 过采样与不同 worker | 齐心并行、多实例 |
| SAC | 双 Q + entropy max | off-policy replay buffer | 连续动作、需高样本效率 |
| DDPG/TD3 | Deterministic policy | deterministic actor gradient | 高维连续控制 |
从 Lecture slide 中抽象出来的设计维度
讲者强调的差异主要来自三个维度:更新频率(on-policy vs off-policy),目标函数约束(clipping / KL / trust region),以及是否带 entropy 或自动调节 exploration。
训练监控与实验指标
- KL divergence:监控更新是否突破 trust region;
- Advantage 分布:过宽代表 high variance,过窄代表 bias 大;
- Critic loss 曲线:暴涨意味着 learning rate 太大或目标不稳定;
- Entropy:下降太快说明 exploration 落入 determinism。
指标之间的 tradeoff
降低 critic loss 并不总是好事——只要 advantage 估计偏差大,Actor 就会收到错误信号。稳定训练需要同时看 loss、KL 和 policy entropy 的趋势。
本章小结
主流 Actor-Critic 族在 trust region、entropy 和 off-policy buffer 上各有侧重;实战中需要观测多条曲线并配合 early stopping 或 checkpoint rollback。
评测与基准
评价指标体系
- Sample efficiency:每次 update 平均消耗多少 transitions;
- Reward saturation:reward 曲线 plateau 是否稳定;
- Entropy decay:entropy 快速下降表示 exploration collapse;
- Policy divergence:KL 及梯度方向是否与 critic signal 保持一致。
审慎设定评测窗口
测试每个 checkpoint 时要使用固定随机种子和 rollout steps,防止 single-run high reward 误导结论。建议把 best-of-\(N\) 分数与均值、标准差一起上报。
Benchmark 例子
- MuJoCo locomotion:PPO 作为 baseline,SAC 提供更高样本效率;
- Atari:A3C/A2C 展示了批量并行能显著缩短收敛;
- Robotics sim2real:严格控制 KL、safety filter 与 entropy;
- 多智能体 StarCraft:centralized critic + decentralized actor。
Benchmark 时常犯的错误
只在 single random seed 下复现 best score,会掩盖 policy collapse 和 training instability。建议至少跑 3-5 条种子,并把 KL 轨迹与 reward curve 一起画。
本章小结
评测不只是看 final reward,还要监控 entropy、KL、critic loss 与 sampling ratio,才能判断 Actor-Critic 是否真正稳定。
奖励塑形与时间信用分配
卷积 LSTM 和 reward shaping
课程强调在 multi-stage/ hierarchical task 中提供 intermediate reward 能显著加速 critic 收敛。做法是把 reward 分解为 completion reward + auxiliary reward,并用 dynamic weighting 控制 gradient magnitudes。
Reward shaping 的 guardrails
辅助 reward 必须保持 potential-based(即不改变 optimal policy),否则会鼓励 agent 偏离真正 objective。通常引入 shaping 函数 \(F(s,a,s')\) 并确保 \(\sum_t \gamma^t F(s_t,a_t,s_{t+1})\) 的总和为零。
可微分规划器与 credit assignment
讲者提到一个实践 trick:在复杂控制中用 differentiable planner 估算未来 trajectory,再把 planner 的 soft value 作为 critic 监督信号。这样能显著减少 long-term credit assignment 的 drift。
Soft planner 需要额外计算
引入 differentiable planning 会增加每步推理开销,必须确保该 planner 能在 low latency 环境里运行,否则会毁掉 real-time control。
本章小结
Reward shaping + planner 信号是处理 multi-stage task 和 long-horizon credit assignment 的现实解决方案,但要确保 shaping 保持 potential-based,同时不抢占 inference budget。
策略安全与系统化部署
Risk-aware fine-tuning
课程提到一个安全层:在 actor update 之前检查 critic 输出,如果当前策略值突破 pre-defined threshold 就回滚上一步。这类似 trust region 的 analog,但更偏向 deployment guard。
Conservative critic 的建议
保存多组 critic checkpoints,部署时选取 conservative 一组。这样即便 newest critic overestimates,actor 也不会被过强信号误导。
在线监控与 rollback
在生产系统中,常见做法是把 KL、critic loss 和 entropy 平均值推到 dashboard。若任一指标连续 3 次超阈,就自动触发 rollback 和 entropy bonus 重启。
生产系统的经验
LLM 或 RL 系统里,policy divergence 的 early warning 信号非常重要。课程建议用 3-day rolling window 统计 KL,如果超过 2x historic std,就暂停 actor 更新,让 critic catch up。
本章小结
安全部署要求 actor-critic 系统在更新与 inference 之间形成防火墙:conservative critic,guard rails,自动 rollback 与持续监控。
超参追踪与日志化
Logbook 结构
课程建议为每次实验维护一份 logbook,记录以下字段:
- Learner IDs:Actor、Critic、Target network 的 LR;
- Replay ratio:每个 update 消耗的 transitions;
- Entropy schedule:初始值 + decay 速率;
- Benchmark metrics:KL、critic loss、reward mean。
为什么要 log mutation
比较不同 seed 时,往往只有超参数略微偏差。记录完整 logbook 能让你快速复制 good run,也能快速排查 catastrophic divergence。
自动化表格
| 字段 | 推荐工具 | 目的 |
|---|---|---|
| KL curve | TensorBoard / WandB | 监控是否突破 trust region |
| Entropy | WandB custom scalar | 追踪 exploration collapse |
| Critic loss | CSV + daily summary | 发现 critic drift 前兆 |
| Replay ratio | elastic log | 确保 sample efficiency 不被忘记 |
本章小结
超参日志化将实验从“跑几个 seed”升级为“可复现的工程流程”,对齐团队协作与 performance regression 检查。
实验复现与发布
从数据到可部署模型的流水线
复现实验包含三道关卡:数据收集、训练循环、部署 guard。其中每一关都要持续监控 metrics(KL、entropy、critic loss),并维护实验日志来比较不同 run。
- 数据:使用 deterministic rollout 保存 state/action/reward/truncation;
- 训练:搭建 actor/critic/stage scheduler、自动保存 best checkpoint;
- 部署:将 conservative critic 作为 inference-time guard,保留 fallback policy。
复现流水线的三步守则
1) 先确保 replay buffer 能被序列化;2) 保持 actor update 与 critic update 在同一 config;3) 在 guard stage 触发 rollback 时记录当时的 KL 和 entropy。
版本管理与回滚策略
为了快速回滚,课程建议用 git tag 记录每个 checkpoint 对应的 config(learning rate、lambda、entropy bonus)。若 new run 出现 high KL,就 revert 到 tag,避免误合并。
回滚策略的误区
不要在 rollback 过程中重置 replay buffer,否则会丢失之前的 critic signal;只需回到 checkpoint,保持 buffer state,重新 warm up entropy。
本章小结
实验复现要把训练、日志、回滚打包成一个可执行 pipeline,这样才能在多个团队 copy/paste 同一个好结果。
公式与调度
Advantage 与 TD 计算公式组合
这组公式展示了 actor/critic 之间的信息流: critic 通过 TD error 更新自身,actor 则把预估 advantage 乘以 log probability 做梯度。\(\lambda\) 的调度会显著影响 bias-variance tradeoff,建议在 architecture log 中记录每次变化。
Policy loss 与 entropy
Clip objective 的稳定策略
The clip objective minimizes whichever term is smaller between the unclipped ratio and the clipped ratio, so when \(r_t(\theta)\) leaves the trust region it safely falls back to the clipped variant. Coupling this with the entropy bonus keeps the early-stage exploration from collapsing too quickly.
调度 heuristics 与学习率
常见的调度方案:
- Learning rate anneal:从 \(3e-4\) 归零到 \(1e-5\),用 cosine decay 保持平滑。
- \(\lambda\) 调度:early stage 用 0.95,收敛时渐近到 0.99。
- Clipping eps:当 KL 超过阈值时减小 \(\epsilon\) 并再 warm up。
调度过快的危险
如果 entropy bonus 迅速衰减到 0,策略很容易陷入 deterministic 的死胡同,特别是在 reward 稀疏的环境。建议保留一个 floor,最低也要留 0.01 的 entropy。
本章小结
公式与调度提供了 Actor-Critic 的数学骨架。从 advantage 到 policy loss,每一项都需要被记录、可热替换,并在调度 log 中对应具体指标。
实战案例:机器人控制与多智能体
Robotics 中的 PPO/SAC 选择
在现实机器人控制任务中,训练通常面临采样限制与高维动作空间。PPO 提供的 trust-region + clipping 架构便于在真实设备上限制步幅,而 SAC 的 entropy-optimal off-policy buffer 让拟合速度更快。
现场调度的建议
在 robot arm / locomotion 任务中常用策略是:用短 horizon 的 PPO trial 快速验证 reward 结构;将最有 promise 的设定迁移到 SAC,配合 soft target 和 automatic entropy tuning。PPO 结果更好解释、SAC 更节省样本。
多智能体训练中的共享 critic
当多个 agent 共享环境时,common critic 或 centralized value 是提高稳定性的关键。通常做法是训练一个 joint critic \(Q(\boldsymbol{s}, \boldsymbol{a})\),再把 actor 分段更新:
Agent 只观察自身 action,但 critic 看到全局状态,能够更准确判别局部决策的价值。
共享 critic 的风险
如果 critic 过度依赖 global information,或没有合适的 value decomposition,单个 agent 的 gradient 会被全局 noise 掩盖。解决方案包括 information bottleneck、agent-specific mask 与 periodic critic reset。
本章小结
PPO 与 SAC 在智能体训练中扮演不同角色:PPO 当作安全策略,SAC 管理高频采样;多智能体场景则需共享 critic 并注意信息泄露。
总结与延伸
- Actor-Critic 方法通过学习价值函数来估计优势,降低了策略梯度的方差。
- 价值函数可以用 Monte Carlo、TD、或 n-step 方法拟合,各有 bias-variance 权衡。
- Off-policy 版本通过 importance weights 复用旧数据,提高数据效率。
- Actor-Critic 是 PPO、SAC 等现代 RL 算法的基础。
未来方向
- Self-supervised critic:利用自监督 representation 提升 value estimation 的 generalization;
- Hierarchical actor-critic:把 policy 分层到五百个动作,从高层决策到低层执行;
- Co-training actor-critic with world models:用 dynamics model 预测 next state,从而让 critic 有 richer context;
- Adaptive compute:让硬件动态分配更多计算给 reward 变化剧烈的样本。
未来方向的潜在风险
新架构往往牺牲稳定性以换取更高的 score,务必在 pilot run 中把 KL 和 critic loss 作为 guard rails,不要盲目放开 entropy。
泛化与域迁移
课程提出的迁移策略是:先在 source environment 用 PPO/SAC 训练出 policy,再把 critic 固定,用 small amount of target data fine-tune actor 的 logits。这样避免 target reward 太稀疏导致 critic drift。
迁移中的分布偏移
迁移时要注意 observation/ action space 的 shift;可以在 replay buffer 里混入 source sample 并用 importance weight correction,逐步让 actor 适应 new dynamics。
总结表
| 主题 | 关键措施 | 风险点 | 实践建议 |
|---|---|---|---|
| Advantage 估计 | Critic 学习 \(V\),使用 GAE | 偏差或 high variance | 小步更新 + annealed |
| Entropy 正则 | 加入 \(H()\) bonus | randomness 过大 | 用早期高 entropy、后期 decay |
| Trust region | PPO clip / KL target | step 攀高 | 监控 KL、设回退机制 |
| Off-policy 利用 | Importance sampling + replay | weights 崩溃 | 用 clipping + target smoothing |
拓展阅读
- Mnih et al., Asynchronous Methods for Deep Reinforcement Learning (A3C).
- Schulman et al., High-Dimensional Continuous Control Using Generalized Advantage Estimation (GAE).
- Schulman et al., Proximal Policy Optimization Algorithms (PPO).
- Haarnoja et al., Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning (SAC).
- Lillicrap et al., Continuous control with deep reinforcement learning (DDPG).