CS336 2026 Lecture 6:Benchmarking、Profiling 与 Triton Kernels
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于 Stanford CS336 Spring 2026 官方可执行讲义整理 |
| 来源 | Stanford CS336 |
| 日期 | 2026 年春季 |
本讲主线:正确性靠编程模型,性能靠硬件模型
Lecture 6 接在 GPU 课之后,目标是把“知道 GPU 很快”推进到“知道怎么测、怎么定位、怎么写 kernel”。核心循环是:benchmark 看到端到端时间,profile 看到时间花在哪里,然后用更贴近硬件的数据组织和 kernel 写法修正瓶颈。
本讲的闭环
编程模型给正确性,硬件模型给性能,benchmark/profiling 给证据,Triton 给可控的 block-level 实现。没有测量就改 kernel,基本是在猜。
术语消化:GPU kernel 基础词汇
- Kernel:在 GPU 上执行的函数。
- HBM:High Bandwidth Memory,GPU 的大容量全局显存,带宽高但仍远慢于片上 register/shared memory。
- Thread block / CTA:一组线程,被调度到同一个 SM,共享 shared memory。
- Warp:通常 32 个 lockstep 执行的 threads;分支不同会产生 control divergence。
- Occupancy:SM 上活跃 warps/blocks 的比例,受 registers、shared memory、block size 限制。
- Bank conflict:多个 threads 同时访问 shared memory 同一个 bank,访问被串行化。
- Memory coalescing:warp 中线程访问连续 HBM cache line,合并成高效 memory transaction。
- Tiling:把大矩阵分块搬到 shared memory 中复用。
- Fusion:把多个操作合并进一个 kernel,减少 HBM 往返。
符号说明:kernel 性能公式
本讲出现的 \(N\) 表示向量或矩阵维度,\(M,N,K\) 在 matmul 中分别表示 \(A\in\mathbb{R}^{M\times K}\)、\(B\in\mathbb{R}^{K\times N}\)、\(C\in\mathbb{R}^{M\times N}\) 的维度;\(\mathrm{FLOPs}\) 是浮点操作数,bytes moved 是 HBM 读写量。Arithmetic intensity \(I=\mathrm{FLOPs}/\mathrm{bytes}\) 越高,越容易让 compute units 忙起来。
GPU recap:从硬件到编程模型
Source coverage: review_of_gpus. 本节覆盖的核心概念包括:SM/warp/block/shared memory/bank conflict/coalescing/occupancy。
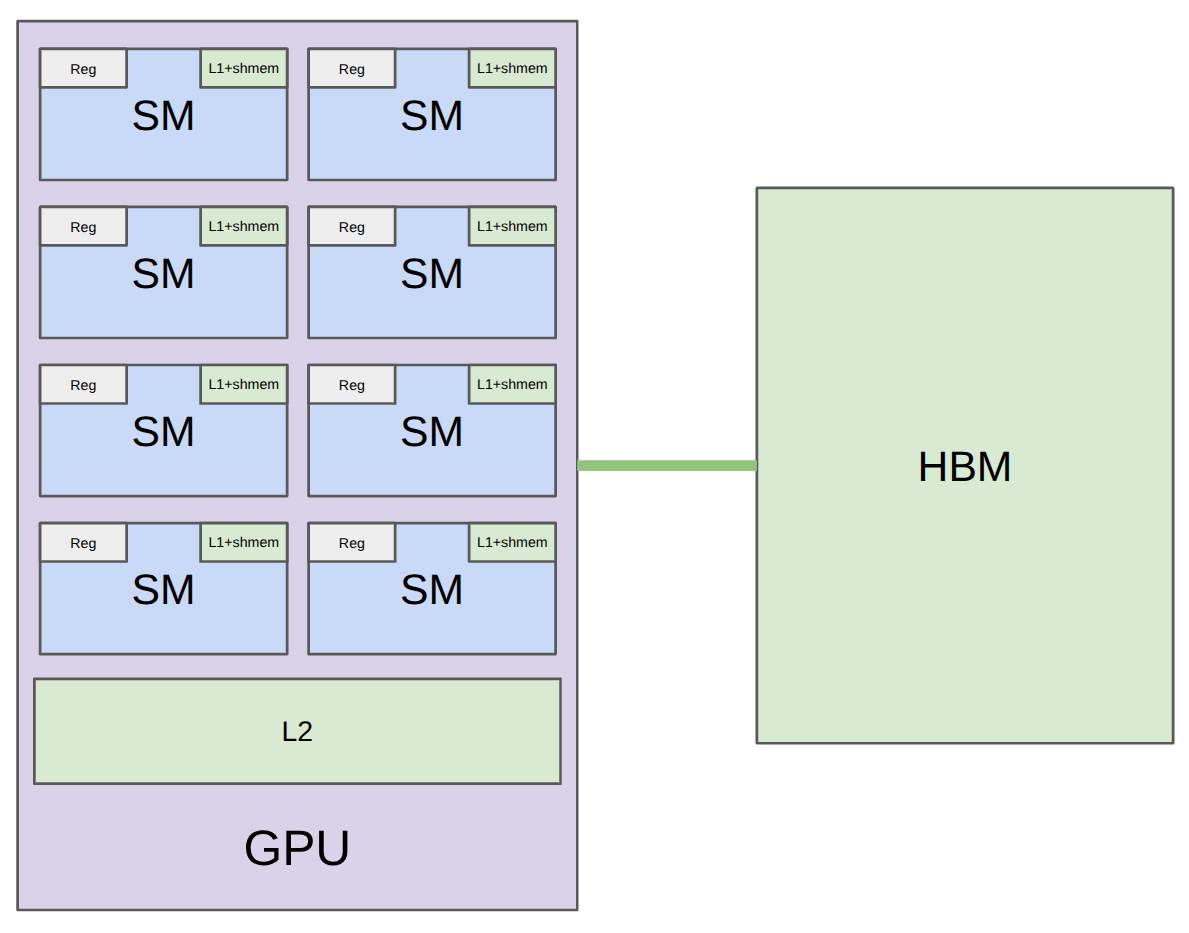
读图:gpu hardware.png
这张图用于把抽象的 kernel 代码连接到硬件执行。读图时先看数据位于 HBM、shared memory 还是 registers,再看线程/blocks 如何映射到 SM。性能优化的关键是让数据在更靠近计算单元的位置被复用,减少慢速 HBM 往返。
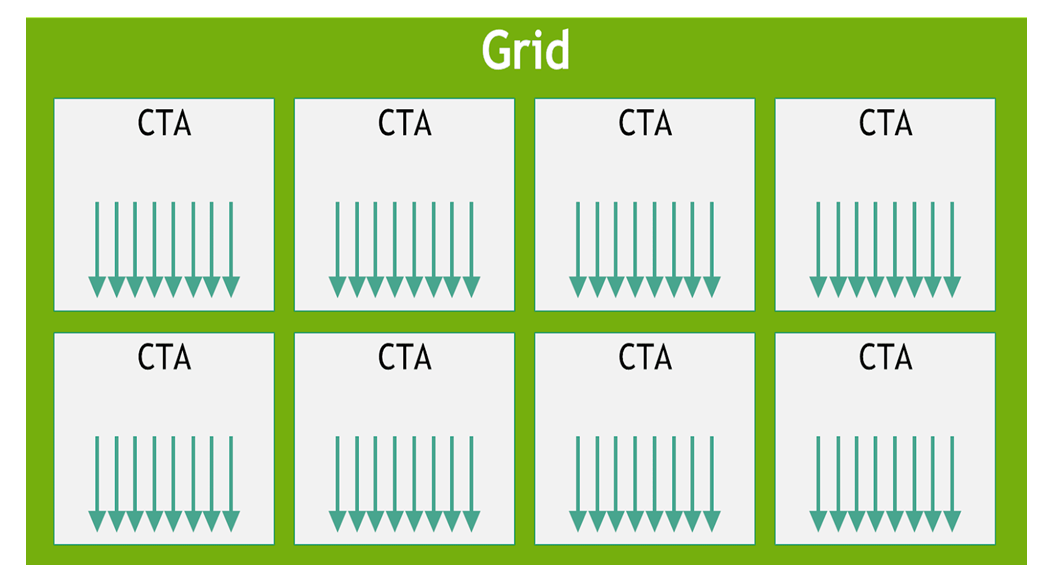
读图:cuda grid.png
这张图用于把抽象的 kernel 代码连接到硬件执行。读图时先看数据位于 HBM、shared memory 还是 registers,再看线程/blocks 如何映射到 SM。性能优化的关键是让数据在更靠近计算单元的位置被复用,减少慢速 HBM 往返。
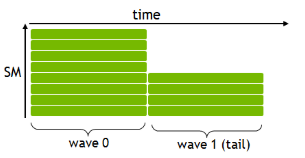
读图:block occupancy.png
这张图用于把抽象的 kernel 代码连接到硬件执行。读图时先看数据位于 HBM、shared memory 还是 registers,再看线程/blocks 如何映射到 SM。性能优化的关键是让数据在更靠近计算单元的位置被复用,减少慢速 HBM 往返。
本章小结
本节说明了一个 kernel optimization 的共同模式:先确认语义正确,再测时间,再看 profiler,最后用 block、shared memory、tiling、fusion 或 layout 调整降低数据移动。
Benchmarking 与 Profiling:先量再改
Source coverage: benchmarking/profiling. 本节覆盖的核心概念包括:benchmarking, profiling, CUDA synchronize, CUDA events, torch profiler。
| 方法 | 回答的问题 | 常见陷阱 |
|---|---|---|
| Benchmark | 这个操作端到端多快?随 shape 如何变化? | 未同步 CUDA、warmup 不足、只测一次。 |
| Profiler | 时间花在哪些 kernels 上?实际调用了什么? | 只看总时间,不看 kernel 名和 shape。 |
| Nsight | 更底层地看 occupancy、memory、warp stalls | 信息量大,需要明确假设再查。 |
for _ in range(num_warmups):
run()
torch.cuda.synchronize()
start_event.record()
run()
end_event.record()
torch.cuda.synchronize()
time_ms = start_event.elapsed_time(end_event)
benchmark 必须同步
CUDA kernel launch 是异步的。如果不调用 torch.cuda.synchronize() 或 CUDA events,测到的可能只是 CPU 发起 kernel 的时间,而不是 GPU 真正执行时间。
本章小结
本节说明了一个 kernel optimization 的共同模式:先确认语义正确,再测时间,再看 profiler,最后用 block、shared memory、tiling、fusion 或 layout 调整降低数据移动。
GeLU case study:naive、builtin、compiled
Source coverage: naive_vs_builtin_vs_compiled_gelu. 本节覆盖的核心概念包括:kernel fusion, torch.compile, HBM reads/writes。
def naive_gelu(x):
return 0.5 * x * (1 + torch.tanh(0.79788456 * (x + 0.044715 * x * x * x)))
为什么 builtin/compiled GeLU 更快
Naive PyTorch 写法会拆成多个 primitive kernels,中间结果反复写回 HBM。Builtin GeLU 或 torch.compile 后的 Triton kernel 能把多个 pointwise 操作融合成一次读、一次写,减少 HBM traffic。
本章小结
本节说明了一个 kernel optimization 的共同模式:先确认语义正确,再测时间,再看 profiler,最后用 block、shared memory、tiling、fusion 或 layout 调整降低数据移动。
Triton mental model
Source coverage: triton_introduction / triton_gelu_example. 本节覆盖的核心概念包括:Triton program, block, mask, pointer offsets, PTX。
读图:cuda grid.png
这张图用于把抽象的 kernel 代码连接到硬件执行。读图时先看数据位于 HBM、shared memory 还是 registers,再看线程/blocks 如何映射到 SM。性能优化的关键是让数据在更靠近计算单元的位置被复用,减少慢速 HBM 往返。
pid = tl.program_id(axis=0)
offsets = pid * BLOCK_SIZE + tl.arange(0, BLOCK_SIZE)
mask = offsets < num_elements
x = tl.load(x_ptr + offsets, mask=mask)
tl.store(y_ptr + offsets, y, mask=mask)
Triton 与 CUDA 的差异
CUDA 通常让你描述每个 thread 做什么;Triton 更像描述一个 program/block 如何处理一块数据。它牺牲部分底层控制,换来更高层、更适合深度学习 kernel 的表达。
本章小结
本节说明了一个 kernel optimization 的共同模式:先确认语义正确,再测时间,再看 profiler,最后用 block、shared memory、tiling、fusion 或 layout 调整降低数据移动。
Triton softmax:row fits in one block
Source coverage: triton_softmax_example. 本节覆盖的核心概念包括:row-wise reduction, max subtraction, exp, normalization。
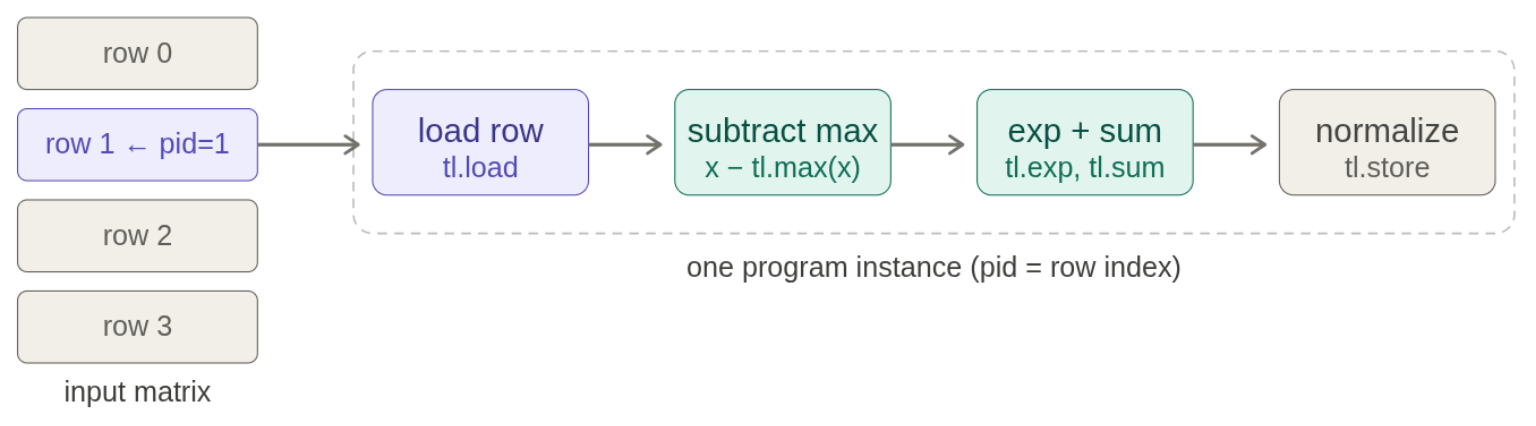
读图:triton softmax.png
这张图用于把抽象的 kernel 代码连接到硬件执行。读图时先看数据位于 HBM、shared memory 还是 registers,再看线程/blocks 如何映射到 SM。性能优化的关键是让数据在更靠近计算单元的位置被复用,减少慢速 HBM 往返。
fused softmax 的资源意义
Naive softmax 需要 max、subtract、exp、sum、divide 多个 pass。若一整行能放进一个 Triton block,就可以在 shared memory/register 中完成 reduction,只读写 HBM 各一次左右。
本章小结
本节说明了一个 kernel optimization 的共同模式:先确认语义正确,再测时间,再看 profiler,最后用 block、shared memory、tiling、fusion 或 layout 调整降低数据移动。
Triton row sum:row larger than block
Source coverage: triton_row_sum_example. 本节覆盖的核心概念包括:tiling over columns, accumulators, final reduction。
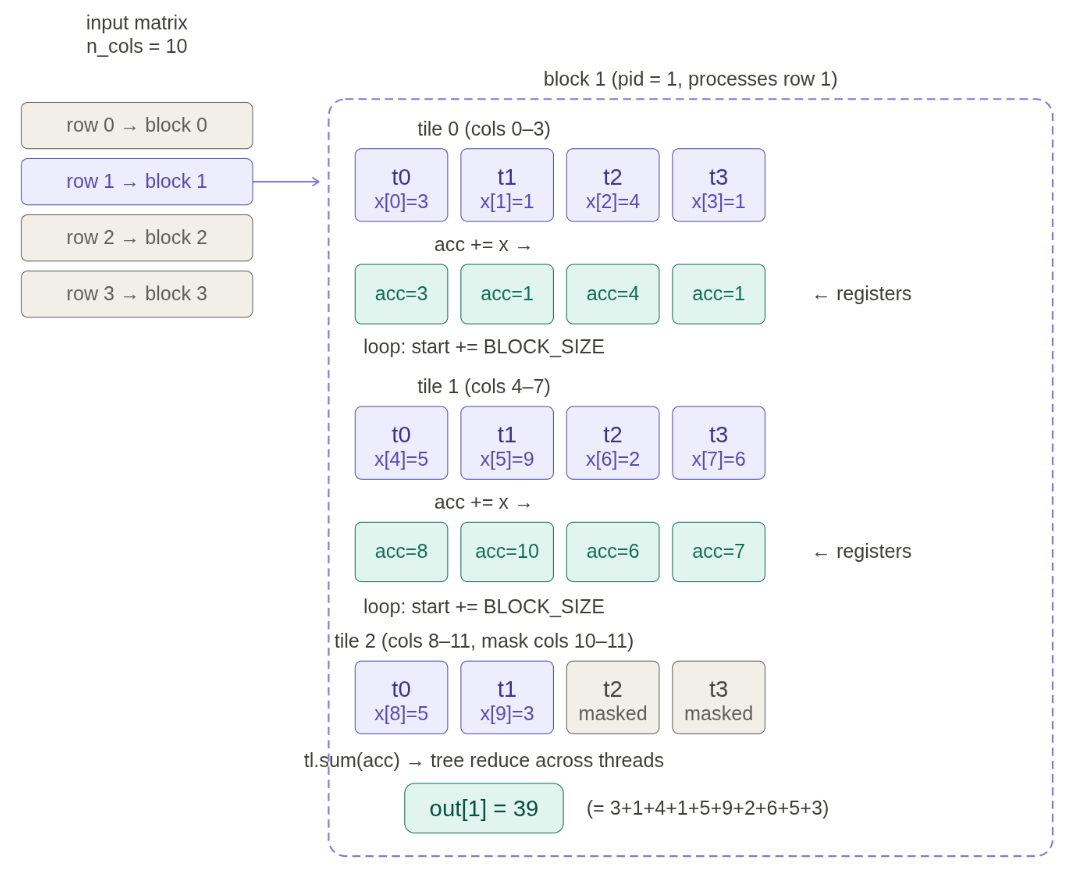
读图:triton row sum.png
这张图用于把抽象的 kernel 代码连接到硬件执行。读图时先看数据位于 HBM、shared memory 还是 registers,再看线程/blocks 如何映射到 SM。性能优化的关键是让数据在更靠近计算单元的位置被复用,减少慢速 HBM 往返。
row 不适合一个 block 时怎么办
如果一行太长,不能一次放进一个 block,就把行切成 tiles。每个 program 遍历多个 tiles,局部累加到 accumulator,最后再做 block 内 reduction。这是 tiling 思想的最小例子。
本章小结
本节说明了一个 kernel optimization 的共同模式:先确认语义正确,再测时间,再看 profiler,最后用 block、shared memory、tiling、fusion 或 layout 调整降低数据移动。
Triton matmul + ReLU:tiling and fusion
本节覆盖源码函数 triton_matmul_relu_example。核心概念包括 tiled matmul、tl.dot、shared memory reuse 和 fused activation。
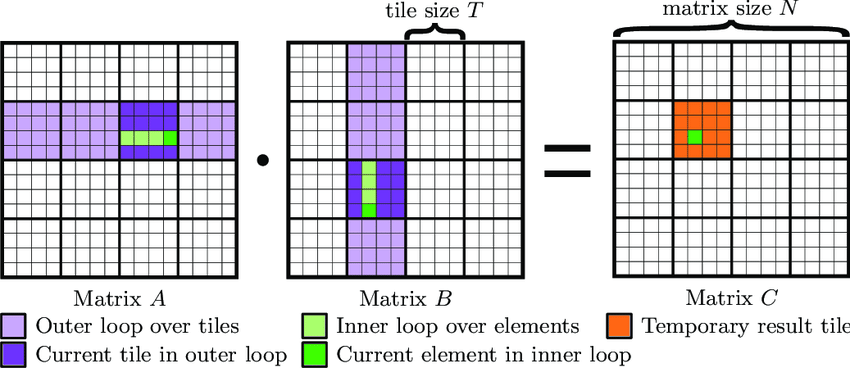
读图:gemm tiled.png
这张图用于把抽象的 kernel 代码连接到硬件执行。读图时先看数据位于 HBM、shared memory 还是 registers,再看线程/blocks 如何映射到 SM。性能优化的关键是让数据在更靠近计算单元的位置被复用,减少慢速 HBM 往返。
for k in range(0, K, BLOCK_K):
a = tl.load(a_ptrs, mask=...)
b = tl.load(b_ptrs, mask=...)
acc += tl.dot(a, b)
a_ptrs += BLOCK_K * stride_ak
b_ptrs += BLOCK_K * stride_bk
acc = tl.maximum(acc, 0.0) # fused ReLU
Matmul + ReLU fusion
如果下一步马上做 ReLU,就没有必要先把 matmul 输出写回 HBM,再读出来做 ReLU。把 ReLU 放在 matmul kernel 尾部,就是典型 fusion。
本章小结
本节说明了一个 kernel optimization 的共同模式:先确认语义正确,再测时间,再看 profiler,最后用 block、shared memory、tiling、fusion 或 layout 调整降低数据移动。
补充推导:从 profiling 到 Triton kernel 的完整工作流
GPU hardware ledger
| 硬件层级 | 典型容量/特征 | 优化含义 |
|---|---|---|
| Registers | 每个 thread 私有,极快 | register 用太多会降低 occupancy。 |
| Shared memory / L1 | 每个 SM 内,快但小 | 适合 tile、row reduction、softmax 等 block 内复用。 |
| L2 cache | 全 GPU 共享缓存 | 对跨 block 的重复访问有帮助,但不可完全依赖。 |
| HBM | GPU global memory,大容量高带宽 | 仍远慢于片上存储;kernel 优化要减少 HBM 往返。 |
| Tensor cores | 专用矩阵硬件 | 需要 shape/dtype/layout 匹配,才能达到高吞吐。 |
occupancy 不是越高越好
高 occupancy 能隐藏 HBM latency,但如果每个 thread 做更多 work、复用更多数据,较低 occupancy 也可能更快。正确问题不是“occupancy 是否最大”,而是瓶颈是不是因为可运行 warps 不够。
Benchmarking 的最小正确性条件
# 1. Warm up first to avoid compilation / cache effects.
for _ in range(num_warmups):
run()
torch.cuda.synchronize()
# 2. Use CUDA events for GPU timing.
start = torch.cuda.Event(enable_timing=True)
end = torch.cuda.Event(enable_timing=True)
start.record()
run()
end.record()
torch.cuda.synchronize()
time_ms = start.elapsed_time(end)
为什么第一次运行不能计入 benchmark
第一次运行可能包含 CUDA context 初始化、kernel compilation、allocator warmup、cache miss 等开销。我们关心 steady-state kernel performance,所以需要 warmup,并且要用多次 trial 看方差。
Profiling 如何读 kernel 名
Profiler 不只是给总时间,还暴露实际调用的 CUDA kernels。例如一个名字里可能出现:
cutlass:NVIDIA 线性代数 kernel library。sm100:对应 Blackwell/B200 架构。f32:输入/输出/accumulator dtype 信息。64x64x16:tile shape,暗示 block 内计算组织。
profile 的核心价值
Benchmark 告诉你慢,profile 告诉你为什么慢。比如同样是 matmul,小 shape 可能调用 SIMT kernel,大 shape 才调用 tensor-core-friendly GEMM;同样是 GeLU,naive 写法可能拆成多个 pointwise kernels,compiled 版本可能融合成 Triton kernel。
GeLU fusion 的 HBM 账本
Naive GeLU 公式是:
若每个子表达式都变成单独 kernel,可能产生多次 HBM read/write。Fused kernel 则把中间值保留在 registers 中:读一次 \(x\),计算多个子表达式,写一次 \(y\)。
| 实现 | kernel 形态 | 资源效果 |
|---|---|---|
| Naive PyTorch | 多个 pointwise kernels | 多次 HBM 往返,launch overhead 多。 |
| Builtin GeLU | 库内 fused kernel | 减少中间读写。 |
| torch.compile | 编译生成 fused Triton kernel | 保留 Python 语义,获得接近手写 kernel 的数据移动模式。 |
Triton GeLU kernel 逐行解释
pid = tl.program_id(axis=0)
start = pid * BLOCK_SIZE
offsets = start + tl.arange(0, BLOCK_SIZE)
mask = offsets < num_elements
x = tl.load(x_ptr + offsets, mask=mask)
# compute gelu in registers
...
tl.store(y_ptr + offsets, y, mask=mask)
Triton program 的心智模型
每个 Triton program 类似一个 thread block,负责一段 offsets。Mask 处理尾部不满 block 的元素。tl.load 从 global memory 读入向量,后续计算在 registers 中完成,tl.store 写回。这个模型比 CUDA thread-level 更粗,但足以表达很多 ML kernels。
Softmax 为什么适合 row-wise block
Softmax 对每一行独立:先求最大值 \(m\),再计算指数和归一化。
若一行能放进一个 block,Triton 可以一次读入整行,在 block 内完成 max、exp、sum、divide,再写回输出。这样避免 naive 版本多次对同一行读写 HBM。
softmax 的数值稳定性
先减去行最大值 \(m\) 不是性能技巧,而是数值稳定技巧。否则 \(e^{x_i}\) 可能 overflow。性能优化不能破坏这种稳定性约束。
Row sum:当一行放不进一个 block
Row sum 是 softmax 的简化版,用来讲解“行太长”的情形。如果 \(N=4096\) 而 block size 是 1024,一行需要 4 个 tiles。每个 program 在 tile loop 中累加 partial sum,最后做 block 内 reduction。
Row sum 是 baby tiling
它没有 matmul 那么复杂,但已经包含 tiling 的核心:把大数据拆成可放进 block 的块,循环加载,局部累加,最后归约。这是理解 FlashAttention 和 tiled matmul 的前置台阶。
Tiled matmul + ReLU 的完整账本
Naive matmul 对每个输出元素 \(C_{mn}\) 遍历 \(k\),不断从 HBM 读 \(A_{mk}\) 和 \(B_{kn}\)。相邻输出元素会重复用到同一行 A 或同一列 B。如果直接从 HBM 重复读,arithmetic intensity 低。
Tiling 做法是:
- 选择一个 \(C\) 的 output tile。
- 依次加载对应的 A tile 和 B tile 到 shared memory。
- 用
tl.dot在 tile 上累积 partial sums。 - 在写回 C 之前顺手做 ReLU,完成 fusion。
为什么 tile size 决定性能
Tile 太小,数据复用不够;tile 太大,shared memory/register 不够、occupancy 下降。高性能 GEMM kernel 的核心就是在 tile shape、register pressure、memory coalescing、tensor core layout 之间找平衡。
本章小结
这一节把源码中的 kernel examples 连接成完整工作流:GeLU 展示 pointwise fusion,softmax 展示 row-wise reduction,row sum 展示跨 tile accumulation,matmul+ReLU 展示 shared-memory tiling 和 activation fusion。四者共同说明:Triton 的价值在于让你以 block 为单位显式组织数据移动。
源码节点全覆盖索引
Lecture 6 是 executable source,真正的“slide-complete”不是逐页 PDF,而是逐个教学函数覆盖。下面这张表说明每个函数在讲义中的位置和处理方式。
| 源码函数 | 教学目标 | 讲义处理 |
|---|---|---|
| review_of_gpus | 复习硬件与编程模型 | GPU 图、grid 图、block occupancy 图、术语表。 |
| benchmarking | 端到端计时 | CUDA events、warmup、synchronize 代码。 |
| profiling | 看 kernel 级时间分布 | profiler 表解释、kernel name 解读。 |
| GeLU variants | fusion 的性能收益 | GeLU 公式、naive/builtin/compiled 对比。 |
| Triton GeLU | elementwise kernel | block offsets、mask、load/store、PTX 观察。 |
| Triton softmax | row-wise reduction | max-subtract-exp-sum-divide 的 fused row kernel。 |
| Triton row sum | row too large for one block | tile loop、accumulator、final reduction。 |
| Triton matmul ReLU | tiled GEMM + fusion | tile pointers、tl.dot、fused ReLU。 |
这张索引表的目的
它是本讲的 coverage matrix 的正文版本。读者可以看到:本讲不是泛泛讲 Triton,而是沿源码中的每个教学函数建立 benchmark → profile → optimize → write kernels 的完整链条。
更细的硬件解释:为什么这些细节会影响性能
Warps、divergence 与 occupancy
Warp 是 GPU 执行的基本调度粒度。一个 warp 内的 32 个 threads 通常执行同一条指令。如果一半 threads 走 if 分支 A,另一半走分支 B,硬件往往需要串行执行 A 和 B,这叫 control divergence。
Occupancy 则描述一个 SM 上有多少 warps 可以同时驻留。高 occupancy 能隐藏 memory latency,因为一个 warp 等 HBM 时,SM 可以切到另一个 ready warp。但 occupancy 太高不一定最好:如果每个 thread 使用更多 registers 来做更多 work,低 occupancy 也可能换来更高 arithmetic intensity。
occupancy 计算直觉
如果每个 thread 用 160 个 registers,一个 block 有 128 threads,那么一个 block 需要 \(160\times128=20480\) registers。若一个 SM 有 65536 registers,最多只能同时放下 3 个这样的 blocks。register pressure、block size 和 max warps 共同决定 occupancy。
Bank conflicts 与 swizzling
Shared memory 被分成多个 banks。若同一 cycle 内多个 threads 访问同一个 bank 的不同地址,访问会被串行化,形成 bank conflict。矩阵乘法中,读取 A 的行和 B 的列很容易造成不同访问模式,因此高性能 kernel 常通过 swizzling 改变 shared memory layout,减少冲突。
bank conflict 很隐蔽
代码语义完全正确,但性能可能因为 bank conflict 急剧下降。Profiler 或更底层的 Nsight 指标才能确认这类问题。只看 Python 层时间很难定位。
Memory coalescing 与 HBM transaction
HBM 访问通常以 cache line / transaction 为单位。若一个 warp 的 threads 访问连续地址,硬件可以合并成少量 transaction;若访问跨越很多不连续位置,就会浪费带宽。Coalescing 是 global memory 访问优化的第一原则。
coalescing 的一句话判断
同一个 warp 的相邻 threads 最好访问相邻地址。若 thread 0、1、2、... 访问的是矩阵同一行的连续元素,通常更 coalesced;若访问同一列且 row stride 很大,往往更差。
Triton kernel 参数表
| 参数/概念 | 出现位置 | 含义 |
|---|---|---|
| BLOCK_SIZE | GeLU、softmax、row sum | 一个 program 处理多少元素或列。太小复用差,太大 register/shared memory 压力高。 |
| tl.program_id | 所有 Triton kernels | 当前 program/block 的 id,用来决定处理哪一块数据。 |
| offsets | GeLU/softmax | 当前 block 对应的全局元素下标。 |
| mask | 尾部处理 | 防止读写越界,是 block size 不整除数据长度时的必要保护。 |
| stride | softmax/matmul | 描述逻辑二维 tensor 在一维内存中的跳步方式。 |
| BLOCK_M/N/K | matmul | C tile 的行/列和 K 维 chunk 大小,决定 tile shape 和复用。 |
| tl.dot | matmul | 调用 Triton 的 block-level dot,通常映射到底层矩阵硬件。 |
为什么这些参数不是随便调
Triton kernel 的参数直接映射到硬件资源:block size 影响并行粒度,mask 影响边界处理,stride 决定内存访问连续性,tile shape 影响 shared memory/register pressure 和 tensor core 使用。调参不是玄学,而是在硬件约束下找平衡。
扩展讲解:从源码到性能判断
为什么 GeLU 是第一个好例子
GeLU 是 elementwise operation,数学上不复杂,却非常适合说明 kernel fusion。因为 naive GeLU 由乘法、加法、立方、tanh、再乘法组成,如果框架把它拆成多个 kernels,每个中间 tensor 都要写回 HBM 再读出。
| 版本 | 执行方式 | 资源结果 |
|---|---|---|
| naive PyTorch | 多个 pointwise kernels | launch 多,HBM 往返多。 |
| builtin GeLU | 手写/库内 fused kernel | 读一次、算完、写一次。 |
| compiled GeLU | torch.compile 生成 Triton kernel | 保持 Python 表达,获得 fusion。 |
elementwise kernel 的核心瓶颈
Elementwise 操作的 FLOPs 很少,bytes moved 却和 tensor 大小成正比。单独执行时通常 memory-bound。Fusion 的目标不是减少数学 FLOPs,而是减少中间结果在 HBM 中来回搬运。
Profiler 表应该怎么看
当 profiler 显示很多小 kernel 时,通常有三种解释:
- Python/PyTorch 代码被拆成多个 primitive operations。
- 每个 primitive operation 都 launch 一个独立 CUDA kernel。
- 中间结果 materialize 到 HBM,形成额外 memory traffic。
若 profiler 显示一个长名字的 CUTLASS/Triton kernel,则要读名字里的线索:架构代号、dtype、tile shape、layout alignment。这些信息帮助判断是不是 tensor core kernel、tile 是否过小、是否有 alignment 问题。
profile 后怎么行动
如果瓶颈是许多小 pointwise kernels,优先考虑 fusion;如果瓶颈是 GEMM 但 MFU 低,检查 shape、dtype、layout、tile;如果瓶颈是 memory copy 或 communication,优化 kernel 本身可能无效。
Triton masks 的必要性
很多 tensor 长度不能被 block size 整除。例如 \(N=10{,}000\),\(\texttt{BLOCK\_SIZE}=1024\),最后一个 block 会越界。Triton 用 mask 防止读写越界:
offsets = start + tl.arange(0, BLOCK_SIZE)
mask = offsets < num_elements
x = tl.load(x_ptr + offsets, mask=mask, other=0.0)
tl.store(y_ptr + offsets, y, mask=mask)
mask 是 correctness 条件,不只是性能细节
没有 mask,最后一个 block 可能读到非法地址或写坏输出。很多 Triton kernel 的第一类 bug 就来自 tail block 没处理好。
Softmax 的读写账本
Naive row softmax 至少经历这些阶段:row max、subtract max、exp、row sum、divide。若每步都是独立 kernel,读写次数近似为多次 \(MN\)。Fused row-wise softmax 则把一整行放进 block 中,局部完成 reduction 和 normalize。
| 阶段 | naive 实现 | fused Triton 实现 |
|---|---|---|
| max | 读整行,写 max | block 内 reduction。 |
| subtract/exp | 再读整行,写中间结果 | registers/shared memory 中完成。 |
| sum | 再读 numerator,写 denominator | block 内 reduction。 |
| divide | 再读 numerator/denominator,写输出 | 只写最终输出。 |
Matmul tiling 的指针结构
Triton matmul kernel 不是直接写三重 for loop,而是构造指针矩阵:
indices_m选择 C tile 的行。indices_n选择 C tile 的列。indices_k选择当前 K tile。a_ptrs和b_ptrs指向当前要加载的 A/B tile。
每轮 K tile 做一次 tl.dot(a,b),累加到 acc。循环结束后可以在 acc 上做 ReLU,再写回 C。
Tiled matmul 的统一解释
Tiling 把 HBM 里的大矩阵切成可放入片上存储的小块,让一个 tile 内的数据服务多个输出元素。Fusion 则把 matmul 后的 ReLU 放在写回前完成。两者都在减少 HBM 访问。
本章小结
源码中的每个 kernel example 都在回答同一个问题:如何把高层 tensor expression 改写成更少 HBM traffic、更高片上复用、更适合 SM/warp/block 执行的程序。Triton 的价值在于让这种改写比 CUDA 更接近数学表达,但仍保留 block-level 控制。
Assignment 2 视角:从 correctness 到 performance
Lecture 6 对应的 systems assignment 不只是“写出能跑的 kernel”,而是要求你 benchmark 和 profile 实现。一个 kernel 的评价至少包含三层:
| 层级 | 问题 | 证据 |
|---|---|---|
| Correctness | 输出是否和 PyTorch reference 接近? | torch.allclose、单元测试、极端 shape。 |
| Performance | 是否比 baseline 快?随 shape 如何 scaling? | CUDA event benchmark,多次 trial,warmup。 |
| Attribution | 时间花在哪些 kernels 和 memory 操作上? | PyTorch profiler、Nsight、kernel 名、occupancy/throughput 指标。 |
不要跳过 correctness
高性能错误 kernel 没有意义。Triton 的 mask、stride、边界条件、dtype accumulation 都可能造成 subtle bug。Assignment 的正确姿势是先让 reference 对齐,再 benchmark,再 profile,再优化。
性能比较要公平
比较 naive、builtin、compiled、Triton 版本时,必须使用相同输入 shape、相同 dtype、相同 device,并包含 warmup。否则测到的可能是编译时间、CPU launch overhead、allocator 行为或缓存状态,而不是 kernel 本身。
从本讲走向下一讲
本讲所有优化仍在单 GPU 内部。下一讲进入多 GPU 后,同样的原则会扩大:HBM 往返变成 GPU 间通信,thread blocks 变成 ranks 和 collectives,kernel fusion 的“少搬数据”变成 all-reduce、reduce-scatter、all-gather 的通信账本。
统一心智模型
单 GPU kernel 优化和多 GPU parallelism 都是在问:数据在哪里、谁需要它、什么时候移动、能不能少移动或多复用。Lecture 6 学的是这个问题在一个 GPU 内部的版本。
总结与延伸
本讲把 GPU kernel 工作流压缩成一条路径:理解硬件层级,写出正确 kernel,benchmark 测端到端时间,profile 找真实 kernel 和瓶颈,再用 Triton 调整 block、mask、tiling 和 fusion。
最终 takeaway
性能优化不是玄学。每一次优化都应该能回答:减少了哪次 HBM 读写?增加了多少复用?提高了 occupancy 还是降低了 bank conflict?benchmark 和 profiler 是否支持这个判断?
拓展阅读
- Triton fused softmax tutorial.
- NVIDIA CUDA programming guide: warps, shared memory, coalescing.
- CUTLASS documentation for GEMM tiling and tensor core kernels.
- PyTorch profiler and Nsight Systems/Compute guides.