[LLM Agents F25] 后训练可验证 Agent:从数据到算法
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于 Jiantao Jiao 授课内容整理 |
| 来源 | Berkeley RDI |
| 日期 | 2026-04-02 |
![[LLM Agents F25] 后训练可验证 Agent:从数据到算法](cover.jpg)
课程背景与核心问题
本讲主题是 Post-Training Verifiable Agents。Jiantao Jiao 的切入角度非常明确:如果我们希望 Agent 在真实环境里长期稳定执行任务,仅靠 “对话质量好” 不够,必须把训练目标从 “讨好人类偏好” 扩展为 “在环境反馈下可验证地完成任务”。也就是说,模型输出不再只是文本,而是带状态影响的行动轨迹(trajectory)。
本讲主命题
Agentic 模型的后训练目标可以写成一句话:在保持人类可用性的前提下,最大化可验证任务回报(verifiable rewards)。它要求系统同时满足 “会沟通” 与 “会做事” 两类能力,而不是只优化其中一侧。
讲者在开场就强调,很多早期聊天模型主要优化的是人类偏好(preference alignment),例如回答礼貌、语气自然、内容看起来合理。但 Agent 任务往往包含代码修改、工具调用、数据库查询、外部 API 交互等动作,这些动作会改变环境状态,错误也会有累计效应。因此,训练目标需要显式纳入环境反馈。
从 Chatbot 到 Agent 的目标函数变化
- Chatbot:偏向 “回答是否让人满意”,奖励常来自偏好比较。
- Agent:偏向 “任务是否完成且可验证”,奖励更多来自程序化 verifier。
- 两者并非对立:生产系统通常需要 “偏好质量 + 任务正确率” 的联合优化。
来源:关键帧来源:原视频,时间约 00:01:34。
课程还反复指出一个实践问题:当模型开始执行复杂任务时,“看起来像对” 与 “真的做对” 差距会迅速扩大。越是多步任务,这个差距越明显。因此,是否有高质量 verifier,以及 verifier 是否覆盖关键失败模式,直接决定后训练上限。
本章小结
本章建立了后续全部讨论的前提:Agent 后训练不是把聊天模型 “再微调一下”,而是把训练目标重构为 “环境中的可验证任务完成”。这会牵引数据、评估和算法三条线同时变化。
Agentic 模型与传统后训练范式的分野
为什么传统 RLHF 不能直接覆盖 Agent 需求
传统 RLHF 的核心是偏好建模:收集人类比较数据,训练 reward model,再用 SFT、PPO/GRPO 等算法提升 “被人偏好” 的概率。这条链路在对话系统上很有效,但在 Agent 场景里会暴露两个缺口:第一,许多任务存在硬约束(例如 JSON 结构、单元测试通过、SQL 正确执行);第二,任务执行过程会跨越多轮工具调用,最终结果取决于过程正确性而非表面表达。
常见误区:把 Agent 训练当成 “更长的对话 RLHF”
如果只把 Agent 当作更长上下文的聊天任务,会出现三类问题:
- 过程错误被最终话术掩盖,导致 “可读不可用”;
- 奖励信号过度依赖主观偏好,难以覆盖硬性正确性;
- 训练后模型在真实工具链中不稳定,出现格式漂移和动作失配。
双目标训练:Preference + Verifiability
讲者的建议不是抛弃偏好目标,而是建立双目标后训练框架:模型既要保留自然交互能力,又要在环境中完成可验证任务。具体做法通常是让数据集和评估集同时包含 “偏好维度” 与 “任务维度”,并在训练阶段分配不同权重。
| 维度 | 传统对话后训练 | 可验证 Agent 后训练 |
|---|---|---|
| 训练对象 | 单轮或短多轮文本输出 | 长轨迹动作序列(含工具调用) |
| 奖励来源 | 人类偏好模型为主 | verifier + 偏好联合 |
| 失败表现 | 不够礼貌或不够有用 | 任务失败、格式失败、状态污染 |
| 验证成本 | 高度人工主观判断 | 可程序化自动验证比例更高 |
从 “回答” 到 “行动轨迹”
课程中的一个关键表述是:Agent 的核心单位不是 token,而是 trajectory。一次任务里模型需要先理解目标,再决定何时调用工具、如何解释工具反馈、是否需要重试、何时终止并汇报。这个过程本质是序列决策问题。
后训练单位变化
当训练单位从 “response” 变为 “trajectory” 后,数据标注、奖励计算、评估指标、甚至日志系统都要改变。很多工程团队的瓶颈并不在模型本身,而在没有把这套基础设施同步升级。
本章小结
本章结论是:Agent 后训练必须从 “偏好对齐” 升级为 “偏好 + 可验证任务完成” 的联合优化,并把训练单位重定义为可执行轨迹,而非单条文本回复。
可验证 Agent 的任务建模:环境、工具、状态
三元组视角:Environment / Tools / Verifier
在讲座中,讲者将可验证 Agent 数据与训练对象拆成三个核心部分:环境(environment)、工具(tools)、验证器(verifier)。这不是概念分类,而是可执行系统中的三类实际约束。
Environment 的含义
Environment 不只是 “题目文本”,而是包含运行上下文的完整状态:代码仓库文件、依赖版本、测试脚本、系统提示词、可访问接口、历史交互痕迹等。Agent 的每个动作都可能改变该状态。
来源:关键帧来源:原视频,时间约 00:12:30。
工具调用不是附属能力,而是主能力
讲者强调,Agentic LLM 的一个核心能力是生成可被工具消费的 token 序列。也就是说,模型不仅要 “会说”,还要 “会调用”:参数正确、调用时机正确、错误恢复路径正确。工具链越复杂,训练数据越需要覆盖动作空间差异。
工具调用的三层正确性
- 语法正确:格式、字段、类型、JSON 结构合法。
- 语义正确:调用意图匹配任务目标,参数有业务意义。
- 时序正确:在正确阶段调用正确工具,避免无效循环。
状态转移与轨迹可验证性
Agent 在环境中执行任务时,关键不只是最终答案,而是状态转移是否可追踪。例如代码修复任务中,“改了什么”、“为何改”、“测试是否覆盖” 都应被记录并可验证。这就要求训练样本包含完整轨迹,而不只是终局结果。
只监督终局答案的风险
如果数据只给 “最终通过” 样本,模型可能学到不可泛化的捷径:
- 对中间步骤缺乏约束,导致不可解释行为;
- 面对分布外任务时,缺乏稳定的中间决策策略;
- 调试困难,错误定位成本飙升。
本章小结
可验证 Agent 的建模核心是把问题写成 “环境状态 + 工具动作 + 验证反馈” 的闭环系统。训练质量取决于这三者是否被同时建模,而非只强化最终文本回答。
训练数据构建:覆盖、组合爆炸与泛化
为什么数据问题在 Agent 里更难
讲者把 “高质量训练数据” 放在第一优先级。原因在于 Agent 任务空间是组合爆炸的:环境类型、工具集合、验证方式、任务目标可自由组合。即便在单一领域(如 coding),也会出现仓库结构、测试风格、错误类型、依赖生态的大幅变化。
Agent 数据难点是组合,而非规模
在 Agent 训练中,单纯增加样本数量并不能保证泛化。真正关键是是否覆盖了 “环境-工具-验证器” 的代表性组合,以及这些组合之间是否有足够多的跨域迁移信号。
数据集构建原则
结合讲座内容,可以将可验证 Agent 的数据构建原则归纳为以下四点:任务类型广度、动作多样性、验证维度完整性、失败模式显式化。尤其是失败样本,往往比成功样本更能提升鲁棒性。
| 原则 | 目标 | 落地做法 |
|---|---|---|
| 环境多样性 | 减少场景过拟合 | 同时引入数学、代码、检索、业务 API 等环境 |
| 动作多样性 | 提升策略广度 | 对同一任务保留多条高质量轨迹而非单解 |
| 验证多样性 | 防止单指标投机 | 单元测试、格式检查、规则引擎、人工抽检联合 |
| 失败样本显式化 | 学习错误边界 | 记录失败原因并在训练中加入负反馈 |
从 “看起来强” 到 “真实泛化”
讲者反复提醒:如果训练集与评估集过于相似,模型会出现 “指标高但真实任务崩”。这在 Agent 场景更严重,因为任务链路更长,任何一步分布偏差都会放大终局误差。
数据-评估同分布幻觉
若训练和评估过于接近,会导致团队误判模型能力:
- 在已见任务上持续提升,但在新任务上性能急剧下降;
- 模型学会针对 benchmark 的策略,而非学到一般能力;
- 部署后出现 “离线好、在线差” 的系统性偏差。
本章小结
Agent 数据工程的重点是 “覆盖正确的组合空间”。与其追求样本总量,不如优先保障环境、工具、验证器和失败模式的结构化多样性。
评估系统设计:从单点评分到 Holistic Evaluation
Verifier 不是一个分数,而是一组机制
课程中一个很重要的观点是:verifier 不应被理解为单个布尔规则,而应是多维度验证体系。代码任务可能用单元测试,数学任务可用 proof checker,结构化输出任务要校验 JSON 合法性与字段一致性,业务任务还要检查副作用边界。
来源:关键帧来源:原视频,时间约 00:15:08。
Verifier 的分层设计
- L1 结果层:最终答案是否正确。
- L2 结构层:输出是否满足协议与格式要求。
- L3 过程层:关键中间步骤是否符合策略约束。
- L4 安全层:是否触发越权调用、数据泄露或危险动作。
Harness 交换与鲁棒性验证
讲者提到应在评估中引入 harness swapping:同一任务在不同执行框架、不同工具包装、不同系统提示下重复评测。如果性能大幅波动,往往说明模型依赖了偶然实现细节而非稳健策略。
Harness 交换的价值
它不是 “再测一次”,而是检测模型是否具备环境迁移鲁棒性。若模型只在某个固定 harness 上表现优秀,部署风险会很高。
评估污染与难度监控
课程中还强调 benchmark contamination 与 hardness drift。随着社区迭代加速,公开数据可能被训练过程吸收,导致指标失真。评估系统必须持续监控题目难度与分布变化。
高分不等于高能力
当 benchmark 被污染或难度下降时,高分可能只意味着 “见过类似题”。因此评估要包含:
- 新样本引入频率控制;
- 题目泄露风险审计;
- 难度分层报告(easy/medium/hard);
- 跨 benchmark 交叉验证。
本章小结
可验证 Agent 的评估必须是 Holistic 的:多 verifier、多 harness、多难度分层、持续污染监控。单一分数无法支撑可靠部署。
后训练主流程:Light SFT 与 RL 的分工
两阶段框架
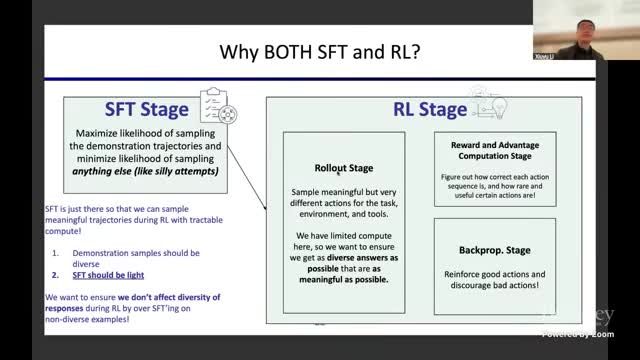
讲者给出的实践框架是两阶段:先做 Light SFT,再做 RL 强化。SFT 的作用是把模型带入 “可用轨道”,减少无意义动作;RL 的作用是让模型在反馈中持续探索并提升真实任务能力。
分工边界
- SFT:建立初始行为先验,压低明显错误率。
- RL:在可验证反馈下优化策略,提升复杂任务成功率。
如果 SFT 过重,模型会过度模仿演示、探索能力下降;如果 SFT 过轻,RL 早期会浪费大量算力在低质量轨迹上。
为什么 SFT 要 “轻且多样”
讲座明确提出 two requirements:SFT 样本要多样,且训练强度要轻。原因是 Agent 需要在 RL 阶段保持探索空间。过重 SFT 会把分布压得过窄,后续即便加大 RL 计算,也难以跳出早期模式。
来源:关键帧来源:原视频,时间约 00:46:25。
轻 SFT 的工程判据
实践中可用如下信号判断 SFT 是否过重:
- 训练后采样熵快速下降;
- 同任务轨迹高度同质化;
- RL 初期奖励提升快但很快停滞;
- OOD 任务表现明显劣化。
RL 阶段的目标不是 “更高分”,而是 “更好学习”
讲者指出,RL 的关键在于让模型从自身错误里学习,而不仅是追求短期 reward 增长。换言之,反馈机制要能区分 “可修复错误” 与 “策略性错误”,并把更新集中在可提升区域。否则会出现训练奖励上涨、测试泛化不升反降。
只看训练 reward 的风险
如果团队只盯训练 reward 曲线,容易忽略:
- 探索空间塌缩(entropy collapse);
- 对易题过拟合、对难题无增益;
- 在验证器缺陷处投机。
本章小结
本章的核心是两句话:SFT 负责起步,不负责封顶;RL 负责突破,但前提是保持可探索性。Light SFT + 强反馈 RL 是当前可验证 Agent 的主流工程路径。
强化学习关键现象:长训练、熵塌缩与探索维持
为什么 “训练更久” 不是自动有效
讲者提出第一个观察:很多系统在 RL 中会很快进入性能平台期。根因之一是输出熵下降过快,模型只会重复高概率轨迹,难以继续发现新解。对长任务 Agent 来说,这意味着 “能做一点,但做不深”。
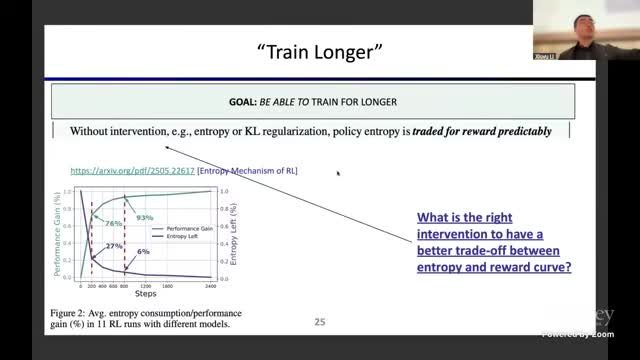
来源:关键帧来源:原视频,时间约 00:58:30。
熵塌缩的实质
熵塌缩不是 “模型变差”,而是 “模型变窄”:它在少数轨迹上越来越确定,但失去探索不同正确路径的能力。对于复杂任务,这会直接限制上限。
第二观察:任务难度需要动态调度
如果训练样本长期停留在简单任务,模型很快 “学完”,后续更新收益极低;但如果一开始就喂过难任务,也会因为正反馈稀疏而学不动。因此,课程隐含了一个 curriculum 观点:难度应随能力上升动态调整。
难度调度的实践框架
- 起步阶段:高可验证、低复杂度任务保证有效学习信号。
- 中期阶段:提高组合复杂度,增加多工具协作场景。
- 后期阶段:引入长轨迹、弱监督、开放式问题,重点保探索。
第三观察:多样高质量响应是核心资源
课程把 “diverse high-quality responses” 作为第三支柱。这里的多样不是随机噪声,而是多条可行策略路径。只有当正负样本都具有结构多样性,RL 才能学到 “什么时候该怎么做”,而不是死记模板。
伪多样性的陷阱
如果多样性只体现在表面措辞,而动作序列和决策逻辑仍然单一,训练效果会被高估。真正有效的多样性应体现在工具选择、步骤顺序、失败恢复策略等决策层。
本章小结
长训练要有效,必须同时处理三件事:防熵塌缩、做难度调度、保证策略级多样性。否则训练越久,收益越小。
算法细节与工程权衡:On-policy、更新强度与熵正则
On-policy 与 Off-policy 的核心差异
讲者用直观方式解释了 on-policy:模型应优先从 “自己当前策略生成的轨迹” 中获得反馈。因为这些错误最贴近当前能力边界,学习效率更高。对 Agent 训练来说,这通常能更好地维持策略一致性和探索质量。
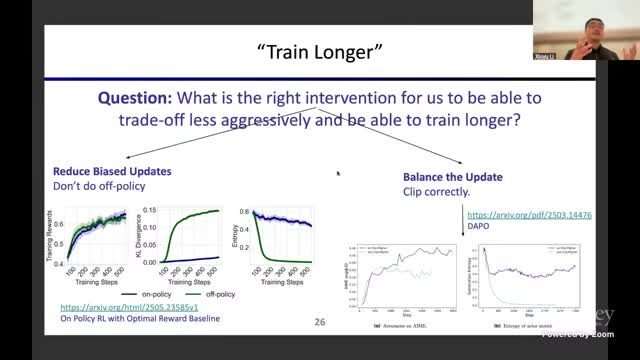
来源:关键帧来源:原视频,时间约 01:00:50。
工程上如何理解 on-policy 优势
on-policy 的价值不是理论口号,而是减少 “反馈错位”:你给模型的奖励,最好对应模型当前真实会走的轨迹,而不是别的策略分布。这样更新方向更一致,避免学到不可复现行为。
更新强度控制:clipping 与解耦阈值
课程讨论了 RL 更新中的 clipping 调整:通过上/下界非对称设置,鼓励低概率 token 的合理探索,缓解过早收敛。讲者也坦诚这类技巧在当下更像 “有效工程 hack”,未必是长期最优理论形式。
工程结论
在可验证 Agent 训练里,稳定更新 与 保持探索 同等重要。只追求稳定会导致保守退化,只追求探索会导致训练发散。clipping、熵正则等机制本质上是在做这两个目标的平衡。
熵正则:显式维持可探索空间
当观测到熵持续下降时,常见做法是加入熵相关损失项,将生成熵维持在合理区间。讲座中提到社区已有多种实现方案,效果依赖任务、模型与 verifier 质量,尚不存在一次性通吃的方法。
不要把技巧当定律
当前许多有效技巧是 “经验可行”,并不代表理论已收敛。团队在迁移方法时应保留审计和消融流程,避免把某个数据集上的增益误判为普适规律。
本章小结
算法层面最关键的不是某个单一公式,而是 “反馈一致性 + 更新稳定性 + 探索维持” 三者协同。on-policy、clipping 调整、熵正则都是围绕这三点展开。
研究前沿与开放问题
理论与实践之间仍有明显断层
讲者明确指出,当前主流后训练算法与理想化机器学习理论并未完全对齐。实践中很多成功经验来自规模化试验和工程迭代,而不是闭式推导。因此,未来几年算法空间仍非常开放。
开放研究方向
- 更贴合 Agent 场景的策略优化目标;
- 更稳健的长轨迹 credit assignment;
- 更低成本的高质量 verifier 构建;
- 训练与部署一体化的在线反馈闭环。
从人类学习类比到可实现算法
课程多次使用 “人类学习” 做类比:先看示例,再做题,再拿反馈迭代。类比本身直观,但真正困难在于把它转成可训练、可扩展、可审计的算法与系统。这一点在 Agent 场景尤为突出。
类比可用,直译不可用
把人类学习过程直接翻译成算法通常会失败。可行路径是提取可操作原则,例如:
- 先建立基本可行策略(Light SFT);
- 再以高质量反馈持续探索(RL);
- 始终监控泛化与评估污染(Holistic eval)。
部署风险与治理议题
当 Agent 被用于代码、业务流程或关键系统,训练问题会直接转化为治理问题。模型是否会越权调用、是否会在弱验证场景投机、是否能被追责审计,都需要在训练和评估阶段前置设计。
能力提升必须伴随可控性提升
如果只提升任务成功率而不提升可解释性、可回滚性和权限治理,系统风险会随能力线性以上增长。可验证训练的真正价值,正在于把能力增长与治理能力绑定在一起。
本章小结
本章结论是:可验证 Agent 仍处于快速演化期,方法论尚未收敛。最值得投入的方向是把 “高质量反馈学习” 与 “可部署治理机制” 联合起来。
附录:工程落地检查清单
训练前准备清单
为了把课程中的方法真正落地,团队通常需要先完成 “训练前系统准备”。这一环节经常被低估,但它决定了后续 RL 是否能稳定推进。尤其是可验证 Agent 训练,任何日志缺失或工具观测缺失都会直接削弱反馈质量。
优先级排序建议
先把 “可观测” 做完整,再追求 “算法更强”。如果缺少高质量轨迹日志、工具调用回放和 verifier 诊断信息,再复杂的算法也会因为反馈噪声而收益有限。
| 阶段 | 检查项 | 通过标准 |
|---|---|---|
| 阶段 | 检查项 | 通过标准 |
| 任务定义 | 任务目标可程序化表达 | 对每类任务可写出明确 success/failure 条件 |
| 任务定义 | 终止条件明确 | 可判定 “何时应停止继续调用工具” |
| 环境建模 | 环境状态可序列化 | 能回放每一步状态变更并定位差异 |
| 环境建模 | 环境重置机制可靠 | 同一任务可重复运行并得到可比较结果 |
| 工具链路 | 工具 I/O 协议固定 | 字段、类型、错误码、超时策略均有文档 |
| 工具链路 | 工具副作用可审计 | 任意调用可追溯到操作者、参数、时间与结果 |
| Verifier | 结果层 verifier 完整 | 关键任务均有自动通过/失败判断 |
| Verifier | 过程层 verifier 可用 | 对关键中间步骤可检测常见违规模式 |
| 数据管线 | 轨迹采集字段齐全 | Prompt、action、observation、reward 全量记录 |
| 数据管线 | 失败样本可分型 | 至少区分工具失败、策略失败、验证器失败 |
| 训练系统 | 采样吞吐可监控 | 可实时观察样本速率、成功率、拒绝率 |
| 训练系统 | 更新稳定性可监控 | 可追踪梯度异常、loss 爆炸、熵突降等事件 |
| 评估系统 | 难度分层报告可产出 | easy/medium/hard 分层结果可自动生成 |
| 评估系统 | Harness 交换机制可运行 | 同任务可在不同 harness 下重复评测 |
| 治理与安全 | 权限边界已实现 | 高风险工具调用需满足显式授权策略 |
| 治理与安全 | 回滚链路可演练 | 关键失败可在分钟级回滚到安全状态 |
训练中监控面板
结合课程中的观察,团队在训练过程中至少应维护三块看板:能力看板(准确率/成功率)、探索看板(熵/轨迹去重率)、可靠性看板(格式正确率/工具错误率)。三者缺一不可。
推荐日常监控指标
- 任务成功率:按任务类别和难度分层统计,不看单一均值。
- 输出熵与去重率:监控探索是否过早塌缩。
- verifier disagreement:不同 verifier 对同轨迹是否冲突。
- 工具失败率:按工具类型和错误码分布聚类。
- 轨迹长度分布:防止出现无意义超长循环。
训练后验收与发布门槛
课程强调 “高分不等于可部署”。因此,训练后验收不能只看 benchmark 分数,还要看跨环境稳定性、异常场景恢复能力、权限边界遵守率。发布门槛必须写成制度化 checklist,而非临时判断。
发布前必须回答的三个问题
- 这个模型在分布外任务失败时,是否会安全失败(safe fail)?
- 当 verifier 冲突或不可用时,系统是否会降级而非盲目执行?
- 线上事故发生后,是否能在审计日志中还原完整责任链?
本章小结
工程落地的关键不是 “再加一种算法”,而是把任务定义、状态观测、验证体系、监控面板和发布门槛连接成闭环。只有闭环完整,课程中的方法才会在真实系统里持续生效。
附录:讲座时间线精读
关键时间点与技术主线
为了便于复习,本节按照时间线提炼讲座主线,并对应到可执行工程动作。此表既可用于复盘,也可直接转为团队内部的学习任务分配。
| 时间 | 讲座要点 | 工程启示 | |
|---|---|---|---|
| 时间 | 讲座要点 | 工程启示 | |
| 00:00–00:03 | 主题定义:Post-Training Verifiable Agents | 明确目标不是 “更会聊”,而是 “更会完成可验证任务” | |
| 00:03–00:06 | 回顾 RLHF/SFT/PPO/GRPO 基本链路 | 将原有聊天后训练管线扩展到轨迹级学习 | |
| 00:06–00:10 | 可验证任务需要清晰 verifier | 建立自动验证优先的数据与评估标准 | |
| 00:10–00:14 | coding agent 环境与工具状态建模 | 数据采集要记录状态转移,不只记录最终答案 | |
| 00:14–00:18 | verifier 多样性与覆盖挑战 | 使用多维 verifier 组合替代单评分器 | |
| 00:18–00:22 | 训练与评估分布差异风险 | 评估集要做去污染和难度漂移监控 | |
| 00:22–00:26 | 泛化不是由单 benchmark 决定 | 建立跨任务、跨工具、跨 harness 的评估矩阵 | |
| 00:26–00:31 | structured output 与真实可用性问题 | 把格式正确率纳入硬门槛,不靠后处理兜底 | |
| 00:31–00:34 | holistic evaluation 与 benchmark contamination | 引入持续更新评估池与社区协作审计机制 | |
| 00:34–00:40 | 进入训练策略讨论前的前提重申 | 先保证数据与评估质量,再谈算法优劣 | |
| 00:40–00:44 | 两阶段框架:SFT + RL | Light SFT 打底,RL 负责探索与提升 | |
| 00:44–00:49 | 轻 SFT + 多样样本的重要性 | 避免过重 SFT 把策略空间压窄 | |
| 00:49–00:54 | 算法仍在演化,理论未收敛 | 保持消融实验与多路线并行探索 | |
| 00:54–00:58 | train longer / harder tasks / diversity 三观察 | 训练策略需同时考虑步数、难度和多样性 | |
| 00:58–01:00 | entropy collapse 现象分析 | 建立熵监控与探索保持机制,防止早停滞 | |
| 01:00–01:03 | on-policy 与 off-policy 对比 | 优先从当前策略轨迹学习,减少反馈错位 | |
| 01:03–01:05 | clipping 解耦与探索鼓励技巧 | 在稳定与探索之间做可解释的参数平衡 | |
| 01:05–01:08 | 熵正则等方法缓解塌缩 | 可显式加入熵控制损失,结合任务表现调参 | |
| 01:08–01:14 | 难题训练集构造与能力分层观察 | 建立按难度分桶的数据调度机制 | |
| 01:14–01:17 | Q\ | A 与系统化建议收束 | 将课程结论转化为团队流程、面板与发布门槛 |
关键术语对照
| 术语 | 本讲语境 | 建议团队内定义 |
|---|---|---|
| Verifiable reward | 可程序化判定的任务反馈 | 可自动复现、可审计、可分解的奖励信号 |
| Environment state | 任务运行上下文全状态 | 含输入、文件、配置、历史动作与观测 |
| Trajectory | 多步行动与反馈序列 | 训练、评估与回放的统一数据主键 |
| Light SFT | 轻量行为先验注入 | 减错而不压缩探索,保持 RL 可提升空间 |
| Entropy collapse | 采样多样性丢失 | 策略退化为单一路径,导致长期停滞 |
| Harness swapping | 执行框架扰动评测 | 测试模型是否依赖偶然实现细节 |
如何使用本附录
建议将时间线和术语表直接映射到团队周计划:每个时间段对应一个工程行动项,每个术语对应一个内部统一定义,避免跨角色沟通歧义。
本章小结
时间线精读的价值在于把 “听懂” 变成 “可执行”。当每个关键观点都对应到具体工程动作,课程内容才能真正进入团队生产体系。
总结与延伸
全讲框架回顾
| 模块 | 核心结论 | 实践动作 |
|---|---|---|
| 问题定义 | Agent 后训练目标是可验证任务完成 | 建立 preference + verifier 联合目标 |
| 任务建模 | 核心三元组:环境、工具、验证器 | 数据与系统日志按轨迹组织 |
| 数据工程 | 难点在组合覆盖而非样本总量 | 扩展环境/工具/验证组合,显式纳入失败样本 |
| 评估体系 | 必须 Holistic,防止指标幻觉 | 多 verifier + harness swapping + 污染监控 |
| 训练流程 | Light SFT 打底,RL 负责突破 | 控制 SFT 强度,保留探索空间 |
| RL 关键点 | 防熵塌缩、难度调度、多样高质轨迹 | 监控熵与难度分层,优化采样与反馈闭环 |
| 算法实现 | on-policy、更新强度平衡、熵正则有用 | 保留消融与审计,避免技巧神化 |
一句话总结
可验证 Agent 训练的本质,不是 “让模型更会说”,而是 “让模型在可观测、可验证、可治理的环境中持续学会做对事”。
延伸阅读与实践建议
| 主题 | 建议阅读/实践方向 |
|---|---|
| 主题 | 建议阅读/实践方向 |
| 课程原视频 | Berkeley RDI 发布的本讲完整视频(Jiantao Jiao, Post-Training Verifiable Agents),建议结合本笔记的关键时间戳回看图示部分。 |
| 评估工程 | 重点补齐 verifier 分层设计:结果层、结构层、过程层、安全层;在内部基准上进行 harness swapping 实验。 |
| 训练策略 | 对比 “重 SFT + 轻 RL” 与 “轻 SFT + 强 RL” 两种配置,追踪熵变化、成功率和 OOD 泛化差异。 |
| 熵与探索 | 针对熵塌缩建立日常监控面板:token entropy、轨迹去重率、有效探索比例、失败类型分布。 |
| 数据体系 | 从 “按任务存样本” 升级到 “按轨迹存状态转移”,将工具调用参数与中间反馈纳入训练可回放数据。 |
| 治理闭环 | 引入权限边界、调用审计、异常回滚机制,把部署可控性作为后训练优化目标的一部分。 |
进一步思考
- 当 verifier 无法覆盖复杂开放任务时,如何避免模型在弱约束区域形成投机策略?
- 在成本受限条件下,如何选择最具信息增益的轨迹进行 on-policy 更新?
- 可验证 Agent 的评估是否应从 “单模型分数” 转向 “系统级可靠性曲线”?
- 如果训练目标同时包含能力与治理,损失函数和评估基准应如何共同设计?