Codex 中的 Plan Mode 与 update_plan
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于五道口纳什 Modern Agent 系列整理 |
| 来源 | 五道口纳什 |
| 日期 | 2026 |
引言:为什么 Planning 是 Coding Agent 的核心能力
本讲继续讨论 Codex / Claude Code 这一类 coding agent 的工具设计。讲者指出,前面介绍 Codex 的最小工具集时,容易漏掉一个看似简单但非常关键的工具:update_plan。在实际开发任务里,一个 agent 面对的不是单步问答,而是一个不断展开的代码库任务:先理解 codebase,再形成计划,然后执行、检查、调整,直到任务完成。
来源:视频画面时间区间:00:00:45–00:00:55。
Codex 的典型任务流
在讲者的抽象里,Codex 处理一个开发需求通常经历三步:codebase exploration、plan、execution。其中 exploration 负责密集读取代码与上下文,plan 把目标拆成可执行步骤,execution 再根据执行反馈持续推进。
这也是为什么 planning 不只是一个 UI 功能。它实际上是 agent loop 中的状态表示:模型需要把“当前要做什么”、“已经做到哪一步”、“是否需要重新规划”保留在上下文里,并在必要时展示给用户。
本章小结
本讲讨论的是 Codex 里两套互补的规划机制:一种是显式的 Plan Mode,另一种是执行期的 update_plan 工具。前者偏协作和需求澄清,后者偏运行时进度管理。
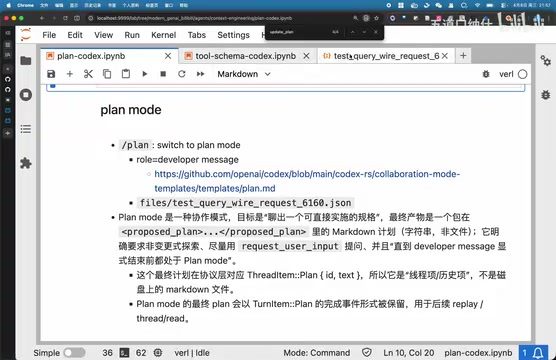
Plan Mode:通过协作生成规格
Codex 的第一种规划方式是 Plan Mode。用户可以通过 /plan 进入这个模式。进入之后,系统会在 developer message 中植入一组完整的行为约束,让模型先探索、再澄清、再形成一份可执行的 Markdown 计划。
来源:视频画面时间区间:00:03:25–00:03:45。
Plan Mode 与一个特殊工具配合:request_user_input。这个工具只在 Plan Mode 中可用,用来向用户提出一到三个短问题,等待用户回答,从而减少需求不清导致的错误实现。
Plan Mode 的产物在哪里?
讲者特别强调:Plan Mode 结束后形成的是一段 Markdown 文本,但它并不会自动落盘成本地文件。它存在于 context window 中,作为后续执行阶段的上下文。换句话说,这是一份上下文内的规格,而不是仓库里的持久化文档。
Plan Mode 的约束也很强:在这个阶段应该做非变更式探索,不直接修改代码。它更像是一次需求澄清和规格设计会话,最后再询问用户是否执行这份计划。用户确认后,系统回到默认执行模式。
Plan Mode 的适用场景
Plan Mode 适合需求边界还不清楚、实现路径有多个分叉、或者需要用户选择取舍的任务。例如一个大型重构可能涉及 API 兼容性、数据迁移和测试策略,此时先让模型用问题收敛规格,比直接动手更稳。
Plan Mode 不是持久化项目管理工具
Plan Mode 的计划只是上下文对象。它可以指导当前会话,但如果希望跨会话保存、恢复或审计,仍然应该像本仓库一样使用文件化计划,例如 task_plan.md、NOTE_GENERATION_TODO.md 等。
本章小结
Plan Mode 是一种协作模式。它通过 developer instruction 和 request_user_input 约束模型行为,把“先问清楚再写代码”产品化成一个明确流程。
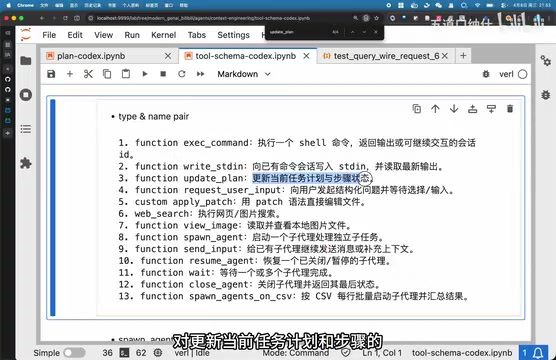
update_plan:执行期的 Live Progress Model
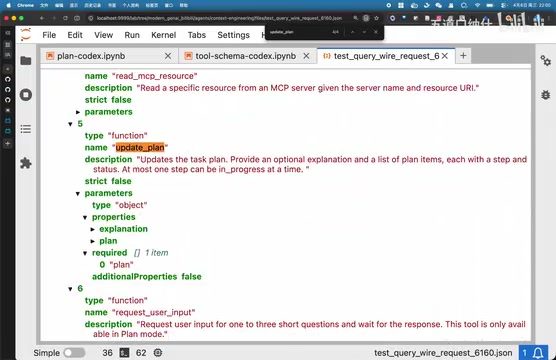
第二种规划方式是 update_plan。它不是进入或退出 Plan Mode 的开关,而是一个执行期工具,用于维护当前任务的 checklist / todo list。讲者把它称为一种 live progress model,即 agent 对当前进度状态的内部表示,同时也可以显示给用户。
来源:视频画面时间区间:00:06:20–00:06:40。
update_plan 的 schema 非常简洁:
其中每个 step 有三种状态:pending、in_progress、completed。系统约束最多只能有一个 step 处于 in_progress,这保证计划始终有清晰的当前焦点。
同一个工具承载三种动态
update_plan 同时承载 plan 的创建、状态更新和 replan。它没有单独的 createPlan、modifyStep 或 replan API,而是每次提交一个新的完整计划快照。
这就是讲者反复强调的 “plan dynamics”:第一次调用相当于创建计划;后续调用可以把某一步从 pending 推进到 in_progress 或 completed;如果执行中发现原计划不可行,也可以重新提交一份新的计划快照,并在 explanation 中说明原因。
本章小结
update_plan 的关键不是复杂 API,而是极简状态模型。模型通过反复提交计划快照,在同一个 agent loop 中完成创建、更新和重规划。
为什么这种设计很优雅
讲者把 Codex 的这套设计称为一种 general、unified、minimal 的 tool system。原因在于,一个很小的函数接口就能表达复杂规划行为,而复杂度被交给模型的语义能力处理。
来源:视频画面时间区间:00:09:25–00:09:45。
这种设计的好处有三点:
- 接口小:工具层只暴露一个
update_plan,不需要为每种计划操作新增 API。 - 语义强:创建、更新、重规划都由模型通过参数语义区分。
- 用户可见:计划不是隐藏在模型内部,而是能作为进度反馈展示出来。
快照而不是补丁
update_plan 更像是提交“当前计划状态快照”,而不是对某个 step 发送 patch。这让模型在 replan 时可以整体重排步骤,也让 UI 或日志系统更容易渲染当前状态。
与文件化计划的关系
需要注意的是,update_plan 仍然是上下文级进度工具。对于长任务、跨会话任务、批量生成任务,文件化计划仍然很有必要。上下文内 plan 适合即时执行,文件化 todo 适合恢复、审计和团队协作。
本章小结
Codex 的设计把规划能力压缩到一个极小但表达力足够的工具里。随着 GPT-5.4 这类模型的能力增强,模型可以非常顺滑地用这个工具维护计划状态。
实践建议:什么时候用哪一种计划
结合本讲内容,可以把两种机制分工如下:
| 机制 | 主要用途 | 典型场景 |
|---|---|---|
| Plan Mode | 澄清需求、形成规格 | 用户目标模糊、任务路径多、需要选择取舍 |
| update_plan | 执行中进度管理 | 已经开始做任务,需要展示状态和动态调整 |
| 文件化 todo | 跨会话持久化 | 长任务、批量任务、需要恢复和审计 |
对于 coding agent 来说,最稳的工作流通常是:先探索代码库,必要时进入 Plan Mode 澄清规格;执行阶段用 update_plan 管理当前进度;如果任务跨度很大,则额外维护文件化计划。
计划不是越细越好
计划的价值在于减少不确定性,而不是制造仪式感。过细的计划会让 agent 在低价值步骤上浪费上下文;过粗的计划又无法指导执行。好的计划应该只捕捉真正影响执行顺序和风险控制的步骤。
本章小结
Plan Mode、update_plan 和文件化 todo 是三个层次。它们分别解决协作澄清、执行状态和长期持久化问题。
总结与延伸
本讲的核心结论可以压缩成一句话:Codex 的 planning 能力不是单一按钮,而是一组分层机制。Plan Mode 负责在动手前把规格聊清楚;update_plan 负责在执行中维护 live progress;文件化 todo 则负责把长期状态从 context window 中解耦出来。
讲者最后指出,随着模型能力增强,像 update_plan 这样极简的工具已经足以让模型完成复杂的创建、状态推进和 replan。真正重要的不是工具数量,而是工具 schema 是否和模型的语义能力对齐。
最终 takeaway
优秀的 agent harness 不一定要堆很多专用工具。一个足够通用、语义清晰、状态可视的工具,配合强模型,往往能覆盖更大的行为空间。Codex 的 update_plan 就是这种设计的代表。
对于我们维护课程笔记仓库,也可以借鉴这套思路:短任务用上下文计划推进,长任务用文件化 todo 固化状态;每次遇到下载、字幕、转录、编译等阻塞,都不要只停在口头记忆里,而要写回队列,形成可恢复的工作流。