[LLM Agents F24] Towards a Unified Framework of Neural and Symbolic Decision Making — Yuandong Tian
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于公开课程资料整理 |
| 来源 | Berkeley RDI |
| 日期 | 2024年10月28日 |
![[LLM Agents F24] Towards a Unified Framework of Neural and Symbolic Decision Making — Yuandong Tian](cover.jpg)
课程背景与挑战
UC Berkeley CS294-196 Fall 2024 的这讲由 Meta AI FAIR 的 Yuandong Tian 主讲,题为 “Towards a Unified Framework of Neural and Symbolic Decision Making”,重点讨论如何把神经网络、搜索、规划与 agent 数据闭环统一到同一套决策框架里。 他以一条渐进趋势开场:随着任务难度升高,最好的模型性能曲线仍然单调下降,并没有出现弹性。 “This is actually in some sense a very worrisome kind of curve that even the best model has not solved this planning problem.” 通过对多个 benchmark(智能规划、Soang 游戏、Maze 路径搜索)重复观察,同样的趋势一再出现:模型的分数被计算图里隐含的符号属性钳制住了,简单堆参数段时间内无法打开局面。 这为本讲的三条应对路径奠定了基调:单靠更大更贵的模型是不够的。
规划能力中的曲线
讲者在前 10 分钟内展示了一条针对复杂规划任务的评估曲线:虽然模型精度能改善,但收敛后的得分仍然偏低,而且所需的训练 token / 参数数量呈指数级上升。 这种现象反复在对话、自动规划、机器人导航里出现,问题的本质在于概率生成模型无法保证符号性质(约束、可行性)。
规划失败的症状
LLM 在规划中最常见的症状包括:1)约束违规(如忽略边界或能耗限制);2)长 horizon 时错误累积;3)没有对状态空间做精确的分叉管理。任何依赖精确性的问题如物流调度、合规审批都会被放大。
三条策略
讲者提出三条修复路径:Scaling(加大 token/参数),Hybrid(LLM + Solver 混合),和更系统性的 Compound AI. 这不是互斥的选择,而是按照成本-思维跨度分层的架构,并且可以逐层叠加。
- Scaling 端通过更大的语言建模、更多训练数据和更多 compute 指望概率泛化,但对约束变量的结构性知识敏感度较低。
- Hybrid 端用 LLM 提供 candidate/action+heuristic,求解器负责 enforce constraints,减少了纯生成模型的不可控性。
- Compound AI 端把多个模块串联(search trace、multi-turn dialogue、constrained solver),形成可审计的反馈回路,方便分工与调试。
来源:视频画面时间区间:00:09:10–00:09:18。
三策略拆解
Scaling 重仓资源,Hybrid 通过 LLM 提供启发式而让求解器负责搜索,Compound AI 则把多种模块串联起来形成内建反馈回路,既可调控质量也便于诊断。
不要盲目相信 Scaling
垂直依赖更大的模型意味着更长的训练周期、更难调试的过拟合、以及过高的推理功耗;如果看不到结构性改进,额外参数最终只会放大 “看起来合理” 的错误。
本章小结
LLM 生成机制在规划问题上天然存在不确定性,需要借助符号结构来恢复可控性,三条策略提供了从工程到方法论上的不同切入点。
搜索轨迹与搜索增强建模
Yuandong Tian 继续展开这条主线,第一步是把搜索过程本身视为监督信号,既保留神经模型的生成能力,又让结果具有可解释的结构。
搜索轨迹作为 weak supervision
讲者展示了搜索增强模型的训练曲线:同样数量级内,搜索轨迹模型能获得 80% 以上的性能,而纯生成模型在 20% 附近徘徊。这是因为前者输出的 token 中不仅包含最终计划,还包含 elaborated trace, cost 评估等信息,让 Transformer 有更多上下文。
来源:视频画面时间区间:00:25:05–00:25:18。
搜索轨迹的价值
搜索轨迹让模型在生成每一步之前先 “思考”:它可以回放执行路径、量化 heuristics、甚至补充静态约束,从而使得 inference 过程中错误率下降、可视化审查变得可行。
讲者还强调,在实际实验(Soang、Maze 等)中,训练数据不是空洞的单步指令,而是 solver 生成的 trace、成本值和 plan。通过在 trace 上采样 64 条 plan,再用 heuristics 重排序,模型在少量样本下就能学会长度更长的推理链。
Search Former 与 DU Forer
在此基础上,团队提出 Search Former,并在 DU Forer 中引入 trace drop。通过随机删掉部分搜索 token(如某些 cost 估计或 intermediate node),模型学会在有缺失的情况下依然复原解的核心,类似 self-supervised 的抗干扰训练。
DU Forer 的训练逻辑
1)先用 solver 采样完整 trace;2)按级别 drop 特定 token(例如 cost、create、exploration);3)让 Transformer 根据残余 trace 重建 plan;4)用 loss 反向传播更新 Transformer 和 drop layer。
- Level 0: 保留完整 trace,作为基线输出。
- Level 1: 删除 create cost,仅保留 path structure。
- Level 2: 删除部分探索动作,强化对关键转折点的建模。
- Level 3: 仅保留最终 plan token,模型必须憋出完整 trace。
来源:视频画面时间区间:00:32:25–00:32:45。
Trace 长度与成本权衡
长 trace 提供更多上下文,但也需要更高的 Token 长度、GPU 内存以及解析开销;实践中必须控制 drop 策略,避免用数学上完备但推理时不可用的序列。
本章小结
将搜索 trace 作为学习目标,并通过 DU Forer 的 drop 策略调控信息密度,使得小模型也能高效捕捉规划质量。
Trace 多样性与采样策略
为了让 trace 既能增强表现又能保持可解释,团队设计了多阶段采样 pipline:先用 solver 输出 64 条 candidate trace,再以 heuristic 评分(cost、length、constraint violation)决定哪些 trace 更值得保留。每条 trace 中都记录了 cost、exploration depth、plan segment,这些 metadata 也被用来训练 diversity 监督。
- Trace 生成: 用 solver/Beam search 构造全局 trace,并记录 intermediate cost。
- Trace 过滤: 根据 violation、length、user goal 过滤掉低质量 trace。
- Trace 采样: 以多样性为目标采样多个 plan,保证训练/推理时能覆盖不同策略。
- Trace 重排: Transformer 输出的 sequence 经过 judge 校验,再与 original solver trace 对齐,形成新的训练数据。
多样性带来的好处
这套采样策略让训练不再依赖单条 optimal plan,而是让模型学到 “多个可行解并选最优” 的思维,尤其在 Soang、Maze、Nano optics 中,diversity 直接提升 test-time performance。
本章小结
多样化 trace 抽样可以把 deterministic solver 的优势和 probabilistic planner 的弹性结合起来,既保持 plan 的正确性也带来新的 candidate,使得 search trace 模型在 unseen 环境中仍能输出鲁棒方案。
多轮交互与宪法设计
Compound AI 的第二步是多轮对话式数据收集。当用户只给出粗略意图时,系统需要询问细节、保持可信,并在有限轮次内给出结构化指令。
APAC Constitution
他们把这一需求抽象成 APAC Constitution:Accuracy、Proactivity、Adaptivity、Credibility 四个维度,每个维度都用明确的行为去量化,比如提问是否聚焦真正的关键信息、是否避免多次无关追问。
来源:视频画面时间区间:00:16:08–00:16:22。
APAC 宪法的教训
1)Accuracy:细节必须落在用户所需的关键字段;2)Proactivity:主动发起有价值的问题;3)Adaptivity:针对不同 traveler persona 调整风格;4)Credibility:控制 hallucination,避免显眼自相矛盾。APAC 让这些目标同时优化成为可能。
“Agent Constitution makes it possible to improve the agent performance along different axes simultaneously with very simple techniques.”
真实对话示例是:travelers 说 “I want to go to Hawaii” 时,agent 先确认预算、偏好(money vs experience)、是否希望多城市,接着询问时间窗口与可接受的交通方式,并在每一轮将收集到的信息更新进 Json schema。这种逐步提问与即时验证的 pipeline 由 APAC 的四维目标驱动,保证问句既有价值又不偏离用户初始意图。
主动问答与评估
他们模拟了 50 个 traveler persona,每个拥有不同偏好和 hidden spreadsheet,agent 通过多轮对话补全 Json 输入,然后用 DPO fine-tune 以优化与 ground truth 的对齐。实验还将 agent 自身当作 judge,不再依赖人工全程打分,从而提高数据效率。
多轮问答指标
关键评估包括:1)overall recall(是否收集所有信息);2)critical recall(对最重要字段的正确性);3)agentic score(回应的主动性与多轮连贯性);4)DPO reward(与 judge 的 alignment)。
避免低级人设陷阱
主动提问必须服从目标:过度提问会浪费轮数,过度固定模板容易忽略 persona 的特殊性。模型应在 accuracy 与 efficiency 之间找到平衡。
主动提问的启发式
1)追踪缺失信息:每轮按字段重要度排序候选问题;2)衡量 cost-benefit:若一问带来高价值但代价高,可拆成两个小问;3)用 persona 聚焦差异:预算敏感型快速询问成本,体验导向型强调活动;4)限制轮数:超出 4 轮就考虑总结已知信息。
本章小结
APAC Constitution 让多轮问答具备可控性和可度量性,agent judge + DPO 形成闭环,使得自监督 fine-tuning 成为可行的训练方案。
人机对齐与评价
讲者进一步提出 “agent judge” 的思想:不再依赖人工标注整条 trace,而是用经过偏好优化的 agent 作为 judge,对每一次互动的 plan 进行打分,再把这些偏好信号回流到 generation 过程中。
| 指标 | 说明 |
|---|---|
| Accuracy | 关键字段(目的地、预算、时间)是否正确且一致 |
| Proactivity | 是否在有限轮数内提问足够的问题来补全上下文 |
| Credibility | 自我一致性与 hallucination 频率;judge 会 penalize 自相矛盾 answer |
| Diversity | 多轮对话中的方案数量与覆盖不同策略 |
Agent Judge+Human Alignment
agent judge 的输出会与 human preference 的 proxy(如 plan optimality、constraint compliance)做 soft alignment,并通过 DPO 反向传导,让 generator 更快收敛到用户认可的行为。
本章小结
Agent judge 提供了一个高频反馈环:每次对话后的 reward 既用于 judge 本身的 DPO 更新,也用于 calibrate planner,形成 metrics + training 的闭环。
Slide 与视觉证据策略
Slide-first 结构化归档
讲者在讲述 trace、agent、DSPy 优化过程时始终依赖结构化的 slide 画面来突显整体 pipeline。我们在整理过程中遵循 slide-first 原则:先捕捉静态 slide(如三类策略、APAC 宪法、DSPy 架构与 latent optimization),再在需要的地方补上动态 frame,用视觉证据锚定每一段教学逻辑。下表列出目前使用的主要视觉素材及其教学意义。
| Slide/Frame | 主要呈现内容与用途 |
|---|---|
| frame-solution-categories.jpg | 三个策略(Scaling/Hybrid/Compound AI)所在的“分层” slide,帮助读者理解不同方法的成本/控制 trade-off(00:09:10–00:09:18)。 |
| frame-apac-constitution.jpg | APAC Constitution 的四个维度表格,说明判别性指标如何与 agent 提问策略绑定(00:16:08–00:16:22)。 |
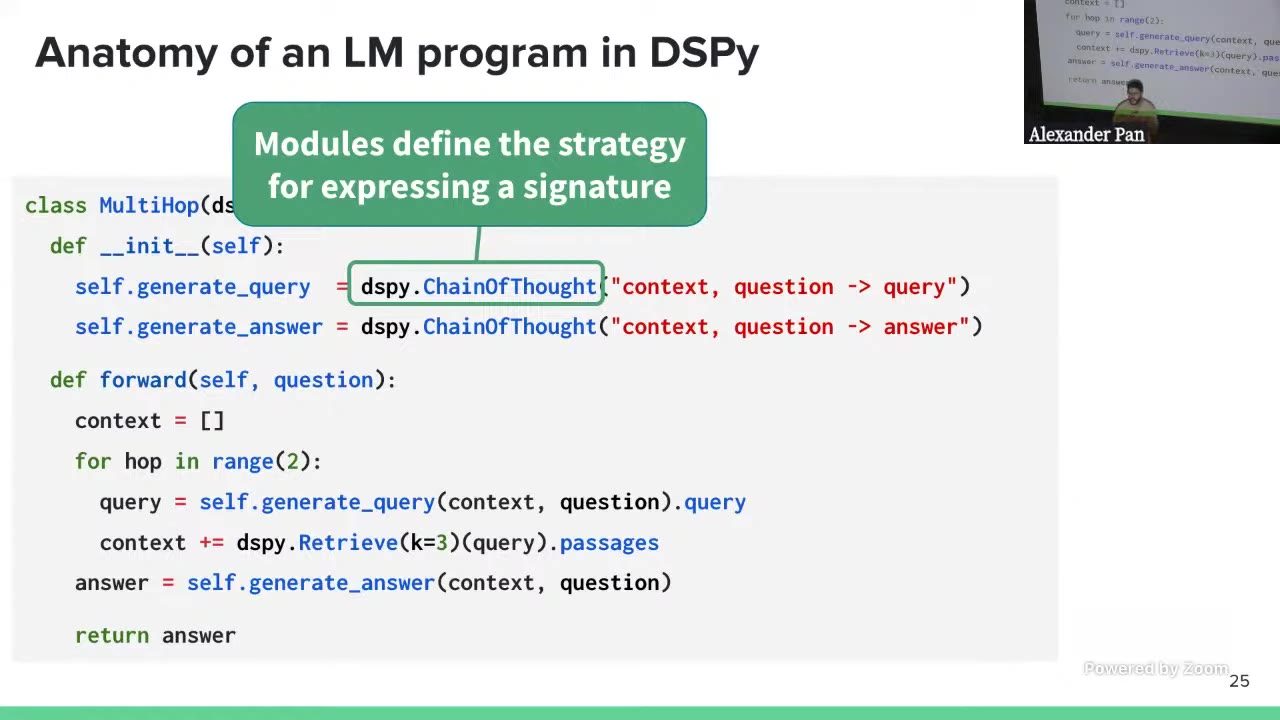
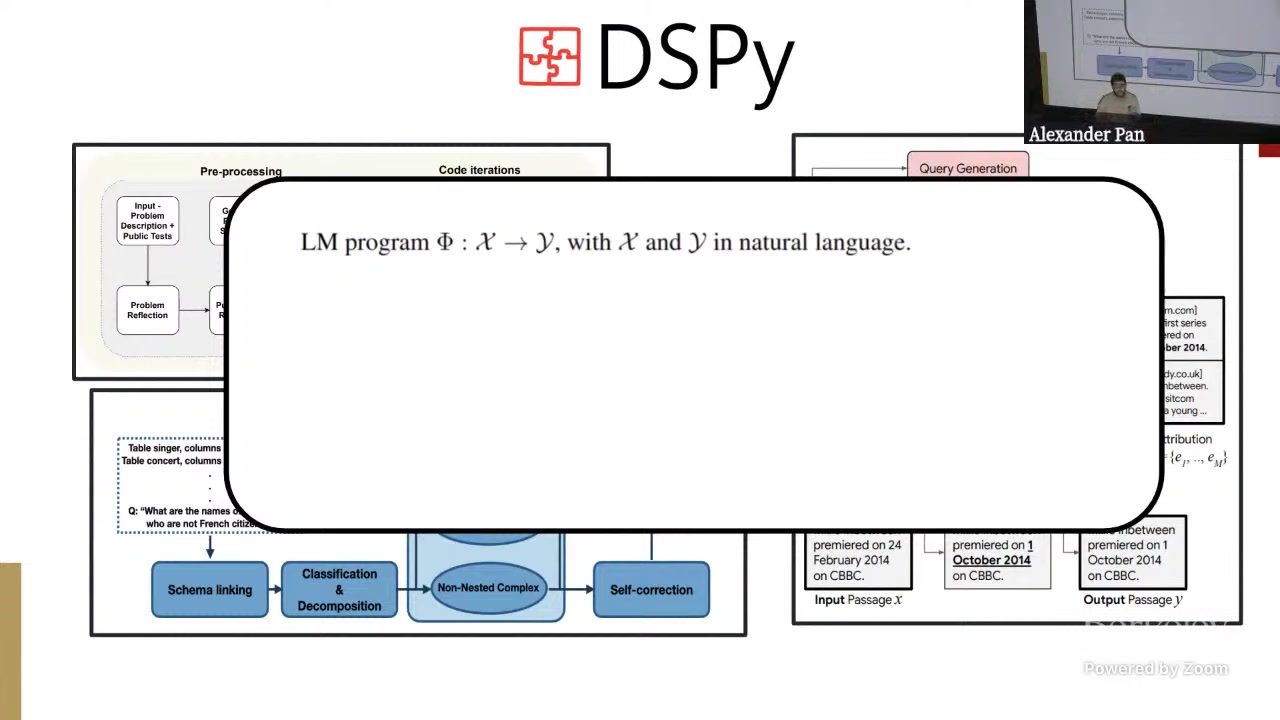
| frame-dspy-architecture.jpg | DSPy 架构图,展示 latent cost、solver、plan 之间的闭环(00:32:25–00:32:45)。 |
| frame-latent-opt.jpg | 描述 latent optimization pipeline 的可微图,用来说明 Green Descent 的双层迭代(00:45:05–00:45:25)。 |
Slide 与 Frame 的协同
Slides 用于呈现结构化公式、路线图、指标表;frames 用于捕捉讲者讲解时的状态、示意图的运动或者醒目的 numerical 例子。只要 slide 可用,就优先用 slide,frame 作为补充动态或补齐解释盲点,两者一起支撑起连续的教学叙事。
关键帧时间脚注
每张插图都严格记录其对应的时间区间,放在图注或 footer,以便读者用 subtitle 回溯细节。例如 trace curve、APAC 结构、latent optimizer 都在它们各自的小节以 00:xx:xx--00:yy:yy 的格式标注。若未来追加新的 slides,务必先对照 subtitles 找出最完整的显示帧,并把时间区间写清。
图像脚注不能省略
缺少时间脚注会让读者无法确认 visual evidence 的来源,特别是当多个图像紧邻讲述不同主题时。每个 figure 都应该在同一页给出字幕区间,必要时在 caption 中重复一次。
本章小结
Slide-first 的整理方式让抽象 pipeline 有了视觉锚点,配合 frame 的动态例证与精确时间脚注,能让读者在阅读文字时快速回到原视频的讲解现场。
DSPy 复杂优化与约束编码
最后一部分讲述 DSPy 框架如何处理组合优化里难以表达的非线性约束,如 nanophotonics 的 birefringent 设计。
潜在线性化 & Green Descent
对于复杂约束,团队先预测一个 cost vector \(C\),再把原问题变成线性子问题,最后用 solver 生成 \(X^\star\)。整个过程构成一张计算图,从 description \(Y\) 到 \(C(Y)\)、再到 solver 输出,loss 是与原时域目标之间的差距,通过 gradient descent 反传训练 C 的表示。
来源:视频画面时间区间:00:45:05–00:45:25。
Latent Optimization Pipeline
1)从描述预测 latent cost \(C\);2)固定 \(C\) 后用可微 solver 近似求解;3)将输出回插至物理 loss;4)用梯度下降训练 \(C\)。这种闪电般的反解比直接求解原始非线性问题更稳定。
Green Descent 的分层步骤
先用轻量级 solver 解析线性化子问题,生成 \(X^\star\),然后把输出过 backprop 回 latent cost,再用梯度下降调整 \(C\)。这种两层迭代(solver + gradient update)在数值上避免了直接在原始非线性空间里爬山的震荡。
光学/制造约束
在 80\u00d780 网格的光学设计里,每个格点只能写 0/1,而且制造工艺要求不能出现孤立的点、必须满足笔刷大小。还要考虑频率响应、干涉路径等多维度约束,因此把问题分解到多个 benchmark(beam splitter、wavelength multiplexer)上验证。
制造约束隐藏陷阱
约束不仅有代数形式,还包括工程可制造性:刷具大小导致的线性约束、不可行的孤立像素、以及发光路径的拓扑限制。任何忽略这些的优化都会在制造阶段报废。
本章小结
通过 latent linearization + solver 回写 DSPy 让复杂约束的学习从 “无穷搜索空间” 降维到 “可微参数”,同时把制造约束纳入评价体系。
工程与验证
为了在真实工程中验证 Compound AI,讲者列出了多个 benchmark:Soang 游戏、Maze 路径搜索、以及纳米光学的 80\u00d780 网格设计。每一类都用 search trace 和 DPO 训练出的 agent(或 latent solver)与纯解法、纯生成模型做对比。
Soang & Maze 基准
Soang 是一个只能推前的 box-pushing game,必须规划好顺序,否则一旦把 box 推入角落就回不去了。实验中,Solution-only baseline 需要约 1.75 亿参数、百万级训练样本才能偶尔成功;而 Search Former+DU Forer 在 15M 参数、10 万样本下即达到 80% 正确率。 Maze benchmark 使用不同规模的 labyrinth:(1)sub 20 steps 的小型 maze;(2)延长到 40+ steps 的大图;(3)引入动态障碍物。Search trace 模型展示出比纯 LLM 更强的 generalization,尤其在分支繁多的 Maze 中,search trace 还提供有效的 candidate pruning。
工程结果摘要
Soang 任务中的 trace dropout 提高了 robustness,Maze 任务则通过 consistency check(agent 自校的 judge)显著减少 hallucination。两个 benchmark 都表明:trace 模型用 5-10 倍更少的数据就能匹配甚至超越卷积的 solution-only baseline。
纳米光学 benchmark
在光学设计任务中,目标是用 80\u00d780 网格的 binary pattern 控制每个像素的折射。训练 pipeline 需要:1)模拟频率响应;2)计算 beam splitter、wavelength multiplexing 的 loss;3)考虑制造时的 brush 限制。 讲者强调:只有把这些指标编入 loss,latent cost \(C\) 才能学习到既合法又高性能的设计。此外,将 solver 反馈回 \(C\) 的过程让模型可以自动从 failure trace 中学习,从而在不同 benchmark 之间迁移。
本章小结
这些 benchmark 既涵盖象棋式的 search,又涉及光学的连续设计,证明了 Compound AI 可以在多领域中一套模型串联多个功能模块,并通过简易的监督信号完成训练。
案例分析
Soang:从搜索到 DPO
Soang 是一个只能向前推的 box-pushing 游戏,非常考验系统对未来状态的规划能力。Compound AI 的做法拆成两个阶段:先用搜索 trace 学习严格的行动顺序,再用 DPO 让 agent judge 给予反馈并缩小 action spirit。训练流程如下:
- 用 solver 生成完整 trace,记录 cost、plan、intermediate state;
- 给 trace 打标签(是否满足 constraints、是否在 4 轮内完成);
- Search Former 学习 trace;agent judge 采样多个 plan、评审 fidelity;
- DPO fine-tune 让 agent judge 更偏向最优 plan。
最终结果是:Search Former + DU Forer 用 15M 参数、100K trace 即取得 80% 成功率,而 solution-only baseline 需要 175M 参数和 1M trace 才能达到 20%。
| 模型 | 参数量 | 样本量 | 成功率 |
|---|---|---|---|
| Solution-only | 175M | 1M | 20% |
| Search Former + DU Forer | 15M | 100K | 80% |
Nano optics:从 latent cost 到制造
在 80\u00d780 网格的光学设计里,搜索 trace 变成了仿真 trace —— agent 观察光线路径、频响和 interference pattern,再把这些信息压入 latent cost \(C\)。整个 pipeline 包括:1)生成 beam splitter、wavelength multiplexer 的仿真;2)挑选满足 brush 约束的 binary pattern;3)用 solver 输出\(X^\star\);4)将 loss 反向传至 \(C\)。
从 trace 到制造的闭环
1)Trace 保留了光线干涉与制造笔刷的信息;2)latent \(C\) 既提取环境描述又控制 solver;3)solver 反馈被用来校准 \(C\),避免生成不可制造的点;4)multi-task loss 让设计在不同 benchmark 之间迁移。
案例启发
这两个案例共同说明:Compound AI 可以把规划 trace、交互问答、Latent solver 串联起来,每个输出既是下一阶段的输入,又是可审计的中间结果。这样的 modular pipeline 更容易定位失败与进行小步迭代。
本章小结
案例分析强调了工程实践中的数据流:search trace、agent judge、latent cost 彼此连接,并在不同任务上反复验证,确保抽象理论可以落地。
资源与成本透明
Yuandong Tian 多次提醒:统一框架的核心不是继续单点堆大模型,而是把有限资源分配到搜索、对话采样、评估与优化这些互相耦合的环节中。
训练 / 推理成本对比
| 组件 | 主要消耗 | 典型参数量 | 观测指标 |
|---|---|---|---|
| Search Former | GPU hours × trace length | 10-20M | Trace fidelity、diversity coverage |
| APAC agent | Token cost × 4-6 rounds | 500M-1B | Dialogue throughput、judge reward |
| DSPy solver | Solver iterations × latents | 5-10M | Constraint slip rate、latents convergence |
分配策略
1)在 search trace 上节省 token,但保留关键 cost info;2)在 APAC 上用 lightweight fine-tuning 快速迭代 judgment;3)在 DSPy 上追踪 solver steps,避免 gradient explosion。这样的资源组合比纯 scaling 更省钱。
Inference latency 管控
Inference 时,trace generation → APAC dialogue → DSPy solver 三个阶段串联,整体 latency 受到最慢环节限制。实际部署采用如下策略:
- Search trace precompute + cache heatmap;
- APAC 设定最小轮数 3,超过 5 轮则触发 fallback;
- DSPy solver use warm start,即 reuse 上一次 \(C\) 初始化。
Latency guardrails
在推理 pipeline 中设置 max_trace_steps、max_dialog_rounds、max_solver_iters,避免某个环节因为异常而拖垮全链路。监控必须包括 queue length 和 rollout duration。
本章小结
分解资源(trace / agent / solver)可以更准地衡量 Compound AI 的成本收益,同时在 inference 中设置 guardrail 保障 latency。
系统部署与调试建议
将这套 Compound AI 整体部署到真实产品中,需要在 search、APAC、DSPy 之间建立清晰的接口,并且对每个中间结果添加监控:
- Search trace output 需记录 cost/constraint flags,便于 debug;
- APAC 的 multi-step question log 需保存用户 intent + agent ask list;
- DSPy 的 latent cost \(C\) 和 solver output 应同时上报,以便对齐不同 benchmark。
调试与部署要点
1)加 monitor:在 inference 中对每次 trace、question、plan 设置 sanity check;2)加缓存:search trace 常常重复,可缓存并复用;3)加 fallback:当 agent judge 指出约束违规时,回退到 hybrid solver 层重新规划;4)加版本控制:每次 DPO 训练都要附带 judge 模型版本。
如何保持链路透明
在 pipeline 的每个阶段写入 structured log(trace id、agent response、solver plan),并为每个 log 提供 trace id -> user request 的映射;这样即便后台出现崩溃,也能快速回放导致错误的原因。
本章小结
部署 Compound AI 时,必须让每个模块的输出可观测、可回放,并在 judge/solver/trace 之间建立版本联动,才能快速定位推理失效并执行回滚。
可观测性与评估指标
要让 Compound AI 在工程中稳定运行,需要把 trace、agent、solver 的运行状态映射到清晰的指标集合。
关键指标面板
- Trace fidelity:trace 与 solver 输出 plan 的相似度(例如 Jaccard overlap)。
- Judge reward curve:agent judge 的 accuracy/proactivity/credibility 逐轮变化。
- Constraint slip rate:每份 plan 中 constraint violation 的出现频率。
- Dialogue throughput:APAC 问答完成一个 Json 需要的轮数。
指标背后的数据路径
每个指标都应绑定到一个可追踪的数据源:trace fidelity 取自 search trace cache,judge reward curve 直接从 DPO judge 的 log stream 里采样,并且在 inference 侧还要记录 plan 的 trace_id。Constraint slip rate 需要 solver 返回的 violations feed 到 observability db;Dialogue throughput 则要加上 latency instrumentation(下游 judge 会附带轮数、token count)。只有这样,dashboard 才能在秒级别内准确反映系统状态。
指标的警戒线
设置 guardrails:若 judge reward 连续三轮下降,就触发 new DPO fine-tune;若 trace fidelity < 0.7,就回退到 deterministic solver;若 constraint slip rate 上升,就加 penalty_update。这些警戒线让运营可以快速捕捉模型 drift。
Trace-level 可靠性
Trace 的可靠性可以通过覆盖率评估:每次 inference 都记录 trace ID,后端根据 trace metadata(e.g., depth, constraint violations)统计 coverage heatmap,确保训练集/测试集在每个 region 都有足够样本。
不要忽略 trace skew
Long tail trace(极少数极长或有 large cost 的路径)很容易在训练中被忽略,但它们往往也是 failure 的来源。应建立 trace-skew dashboard,及时重采样这些样本。
本章小结
具有 dashboard 级别的指标可以把抽象的 Compound AI pipeline 可观测化,一旦某个模块输出异常,就能沿着 trace → judge → solver 的路径迅速定位,并在 guardrail 触发时自动纠偏。
工程可视化与监控
Dashboard 设计
Compound AI 的每个模块都要在运营面板上有可见的仪表盘:trace fidelity curve 做横向对比,judge reward curve 与 user satisfaction signal 汇总成二合一视图,solver output 则在另一个 panel 中突出 constraint violation rate。下表列出关键仪表盘与推荐的刷新频率。
| 仪表盘 | 包含指标 | 建议刷新频率 |
|---|---|---|
| Trace health | fidelity、cost variance、skew coverage | 1 分钟 |
| Judge stability | accuracy/proactivity/credibility 分布、NPS proxy scores | 30 秒 |
| Constraint guard | solver violation rate、brush 工艺 compliance | 10 秒 |
可视化的反馈节奏
把不同模块的监控刷新频率按 criticality 分层,避免同一时刻刷新所有指标导致监控卡顿;同时用 trace_id 作为通用维度,在 dashboard 上串联 trace、judge、solver 三段信息,帮助工程师跨模块排查。
Trace 与 Plan 回放
真正的透明度来自 trace/plan 的回放能力:每个 plan 执行后都写入 trace_id.json,包含 heuristic 得分、约束违例和 judge reward,从而可以在运维网页里逐步播放 search trace、judge dialogue、solver output。为了让每次回放都有视觉印象,我们把关键 frame 的时间戳写入同一条 log,便于回放时加载对应的 slide 截图或 frame 图像。
回放提升审计速度
一条 trace 回放不仅能还原 decision path,还能让 engineer 直接看见与 slide 对齐的 visual evidence。比如 00:16:08--00:16:22 段的 APAC slide,会在回放里作为 judge trigger 的注释;00:32:25--00:32:45 段的 DSPy 架构图则用来解释 solver 的 step-by-step 计算。
回放数据不可缺
缺失 trace/frame 之间的时间对齐会拖慢调查进度。务必在日志里同时写入 trace_id、frame_path、timestamp,否则回放时只能靠模糊对照,运营判断会失真。
本章小结
工程监控的重点是把 metrics、visual evidence、回放逻辑合并为一个可检索的三链路,让事件发生时可以迅速定位到对应的 trace frame、judge dialog 和 solver plan,从而对故障做出精准响应。
章节回顾与反思
\paragraph{} Lecture 05 的前 15 分钟通过计算成本与性能曲线设定了 planning domain 的边界:LLM 的 “smooth curve” 已经显示出 scaling 的边际收益递减,必须寻找更有结构性的解决路径。
\paragraph{} Search Former / DU Forer 把 search trace 变成有 supervision 的序列,并用 dropout 模拟现实中不完备的搜索信息。Soang 和 Maze 的 benchmark 展示了 trace 模型在 generalization 上能以小模型击败 solution-only baseline,并为 multi-turn agent 提供更一致的建议。
\paragraph{} 多轮交互部分通过 APAC Constitution 与 agent judge 的 DPO loop 形成自监督闭环,强调四个维度的测量与 persona 差异化问句策略,让 agent 能在有限轮数内输出结构化 plan,显著降低人工对齐频率。
\paragraph{} DSPy 框架把 latent cost \(C\) 作桥梁,串联 search trace、APAC 输出与 solver,从 combinatorial constraint 的难题中降维出可微的优化轨迹。Nano optics benchmark 证明了这套 pipeline 可以同时兼顾性能与工艺合法性。
\paragraph{} 这堂课的亮点在于把 search/agent/solver 串联为一条信息流,而非独立模块:每个输出都包含 time-stamped trace、judge reward、solver plan,构成完整的 audit log。
本章小结
回顾本节可以发现:从 search trace 到 multi-turn agent,再到 DSPy latent solver,整套架构围绕可解释性、结构化监督与工程可观测性展开,构成一个可回放、可调试的闭环。
总结与延伸
本讲通过 Compound AI 的三步路径:1)捕获并压缩搜索轨迹,2)用 APAC 宪法治理多轮问答,3)通过 DSPy 学习复杂约束,在 1 小时内完整展示了从建模到工程落地的闭环。
这三部分之间不是孤立的:trace 模型用来指导 multi-turn agent 的问答流程,APAC 生成的结构化 Json 又是 DSPy 里 latent solver 的约束输入,最终的行动计划被送回 search trace 进行一致性检查,形成一个可审计的控制环。
| 主题 | 关键机制 | 教学价值 |
|---|---|---|
| 搜索轨迹 | Trace-aware Transformer + DU Forer drop | 提高 data/parameter efficiency、增强可解释性 |
| 多轮交互 | APAC Constitution + agent judge/DPO | 多轮提问具备 accuracy/proactivity/credibility |
| 复杂约束 | Latent cost \(C(Y)\) + solver + green descent | 在非线性场景中嵌入可微反馈、兼顾制造约束 |
研究问题与扩展
\paragraph{AI 教练层的版本管理} 当 search trace、APAC agent、DSPy solver 同时迭代时,容易出现 “trace 参数与 agent 判断不同步”。建议把 trace ID、agent judge 模型版本、solver configuration 一起打包成 release 记录,在每次部署前跑自动化 test,确保新版 judge 仍能识别旧 trace,避免 unstable inference。
\paragraph{跨域泛化与 judge 校准} 当前的 agent judge 在 travel intent 任务上表现突出,但在医疗、金融等高风险领域可能对 goal 的理解截然不同。可行的扩展策略是训练 judge 的 mixture-of-experts 或引入 domain embedding 让 judge 自适应 new intent,同时把 judge reward 与 human satisfaction signal(NPS、回访率)对齐,而不是仅依赖 plan optimality。
\paragraph{多模态融合与辅助材料} 讲者提到 “slides、notebooks、photos” 是加强解释的利器。理想情况下,search trace 应该能够引用 slides 中的表格/公式(如 Soang 的 sequencing graph),当视频里出现关键 diagram 时自动截帧并插入 note,保持视觉与文本双重证据。
- 如何进一步压缩 trace 的 token 数量以降低推理成本,同时保持多轮可解释性?
- agent judge 的泛化能力如何迁移到医疗、金融等高风险领域,而不仅仅是在 travel intent 里?
- 微分化的制造约束能否自动抽象成 latent representation,从而在新行业(例如芯片设计)间无缝迁移?
除了理论问题,这套 Compound AI 也要在 production 时持续沉淀:保持 trace/plan 的 audit log、把 DPO reward 与用户满意度对齐,并在不同 region 迭代 judge 模型,才能确保系统的长期健壮。
拓展阅读
- “Beyond A*: Better Planning with Transformers via Search Dynamics Bootstrapping”,用于理解搜索轨迹如何提升规划性能。
- “Dualformer: Controllable Fast and Slow Thinking by Learning with Randomized Reasoning Traces”,对应 trace drop 与可控推理速度。
- “Composing Global Optimizers to Reasoning Tasks via Algebraic Objects in Neural Nets”,讨论神经网络中的组合式全局优化。
- “SurCo: Learning Linear Surrogates For Combinatorial Nonlinear Optimization Problems”,展示组合优化问题中的 surrogate 学习路径。
- APAC Constitution(2024),内部白皮书,详细定义了 Accuracy/Proactivity/Adaptivity/Credibility 的评价方法。
本章小结
Compound AI 的三步法不是孤立的实验,而是面向 production 的组合:把 visual slides、time-stamped frames、trace logs 融合进同一条 pipeline 里,让观众不仅理解方法原理,还能追踪到具体的工程实现。