CS336 2026 Lecture 2:Resource Accounting、Tensor、FLOPs 与 Memory
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于 Stanford CS336 Spring 2026 官方可执行讲义整理 |
| 来源 | Stanford CS336 |
| 日期 | 2026 年春季 |
本讲主线:resource accounting 是训练前的账本
Lecture 2 的目标是把“训练一个模型”拆成可估算的资源账本。语言模型训练不是只写 forward,而是在 compute、memory、bandwidth、dtype、optimizer state、activation 和 wall-clock time 之间做取舍。第一讲说核心目标是 efficiency;第二讲给出 efficiency 的基本单位。
课程开场提到 Marin 的 \(10^{23}\) FLOPs run 已完成并匹配 forecasts。这不是新闻八卦,而是一个工程信号:scaling forecast 只有在 compute 和 memory 账本可靠时才可信。
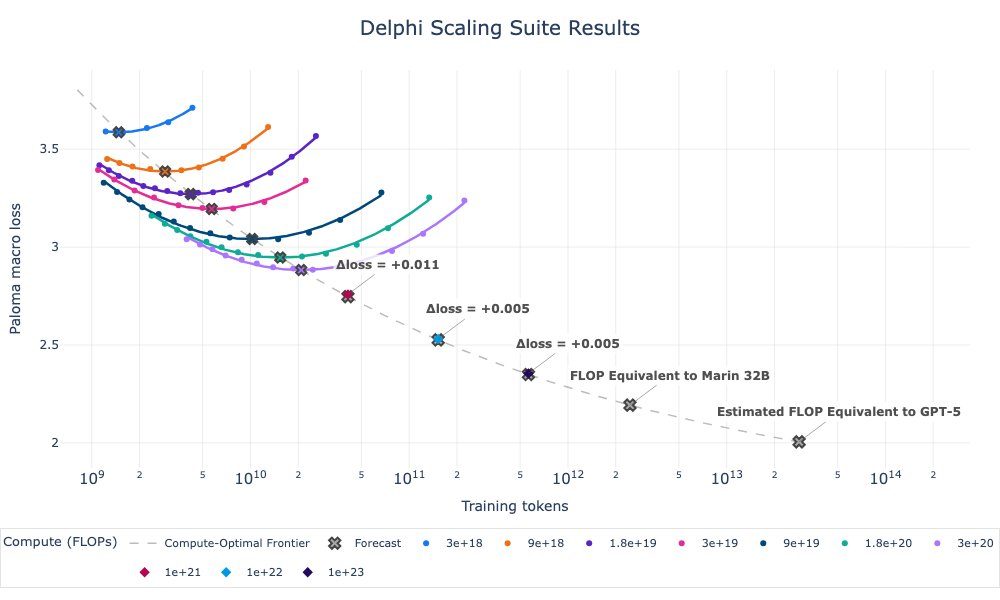
读图:Marin 结果图为什么放在 Lecture 2 开头
这张图展示的是“训练前预测”和“训练后观测”的闭环。要让这件事有意义,必须知道训练到底用了多少 FLOPs、硬件给了多少有效 FLOP/s、模型和 optimizer state 是否能放进显存、训练中是否有通信和 checkpoint 开销。Lecture 2 就是为这种预测能力补上底层账本。
两个 motivating questions
本讲先用两个问题训练数量级直觉。
这里 \(N\) 是参数量,\(D\) 是训练 token 数,系数 6 来自 forward 约 \(2ND\) FLOPs、backward 约 \(4ND\) FLOPs 的粗略估计。70B 参数、15T token 的训练计算量约为:
若用 1024 张 H100,dense bf16 峰值约 \(989.5\) TFLOP/s,假设 MFU 为 0.5,则训练约需 140 多天量级。这不是精确排期,而是训练前判断可行性的 napkin math。
first-use glossary:FLOPs、FLOP/s、MFU
FLOPs 是 floating-point operations,表示总计算量;FLOP/s 是每秒浮点运算数,表示速度。MFU 是 model FLOPs utilization,即实际模型 FLOP/s 除以硬件承诺峰值 FLOP/s。训练时间约等于总 FLOPs 除以有效 FLOP/s。
第二个问题是 8 张 H100 用 AdamW 能训练多大模型。H100 每张约 80GB,8 张总 640GB。若每个参数需要 bf16 参数 2 bytes、bf16 gradient 2 bytes、AdamW 一阶动量 4 bytes、二阶动量 4 bytes,那么仅参数相关状态就要:
640GB / 12 约为 53B 参数。这还没算 activation memory、temporary buffers、CUDA workspace 和 fragmentation,所以是乐观上界。
参数上界不是可训练模型大小
如果不考虑 activations,你会系统性高估能训练的模型规模。大 batch、长 sequence、深层网络都会让 activation memory 迅速变成主要瓶颈。
first-use glossary:optimizer state
Optimizer state 是优化器为每个参数额外维护的状态。Adam/AdamW 通常维护 \(m\) 和 \(v\):\(m\) 是梯度的一阶动量,\(v\) 是梯度平方的二阶动量。它们从零初始化,每步由新 gradient 更新。因为 \(m\) 和 \(v\) 通常用 fp32 存储,Adam 的 optimizer state 显存常常是参数本身的 4 倍(两个 fp32 state vs 一个 bf16 参数)。
first-use glossary:sharding 与 ZeRO
Sharding 是分片:原本每张 GPU 都保存完整对象,分片后每张 GPU 只保存一部分。ZeRO 是 Zero Redundancy Optimizer,在 data parallel 框架内把 optimizer state、gradients、parameters 分阶段切分。ZeRO-1 切 optimizer state,ZeRO-2 再切 gradients,ZeRO-3 连 parameters 也切。越省显存,通信越多。
本章小结
Resource accounting 的第一步是把模糊问题改写为数量级问题:需要多少 FLOPs?硬件有效速度是多少?哪些状态占显存?activation 是否被漏算?这些问题答不出来,就不应该启动大训练。
Tensor 与 Memory:所有训练状态都在张量里
Tensor 是训练系统的基本载体。Data、parameters、gradients、optimizer state、activations 都是 tensor,只是生命周期不同。
| 状态 | 什么时候存在 | 资源含义 |
|---|---|---|
| Data | 每步 batch 输入 | 影响 batch size、sequence length、host-to-device 传输。 |
| Parameters | 全程存在 | 模型权重,forward/backward/optimizer 都要访问。 |
| Gradients | backward 后到 step 前 | 默认累积,需要及时清理或分片。 |
| Optimizer state | 多个 step 间长期存在 | AdamW 的 \(m,v\) 等统计量,常是显存大头。 |
| Activations | forward 后到 backward 用完 | 随 batch、sequence、layers 增长,可用 checkpointing 处理。 |
Transformer 中常见 rank-4 tensor:
其中 \(B\) 是 batch size,\(S\) 是 sequence length,\(H\) 是 number of heads,\(D\) 是 head dimension。
shape ledger
Shape 不是注释,而是资源账本。\(B\) 增大会提升吞吐但增加 activation memory;\(S\) 增大会提高 attention 和 KV cache 成本;\(H,D\) 改变 attention/MLP 矩阵形状;\(L\) 影响参数、activation 和 checkpointing tradeoff。
数值格式:fp32、fp16、bf16、fp8、fp4
Tensor memory 由元素个数和 dtype 决定:

读图:fp32 为什么稳
fp32 有较大的 exponent 和 mantissa,动态范围和精度都充足,所以传统科学计算和 optimizer state 常用它。缺点是每个值 4 bytes,显存和带宽成本高。
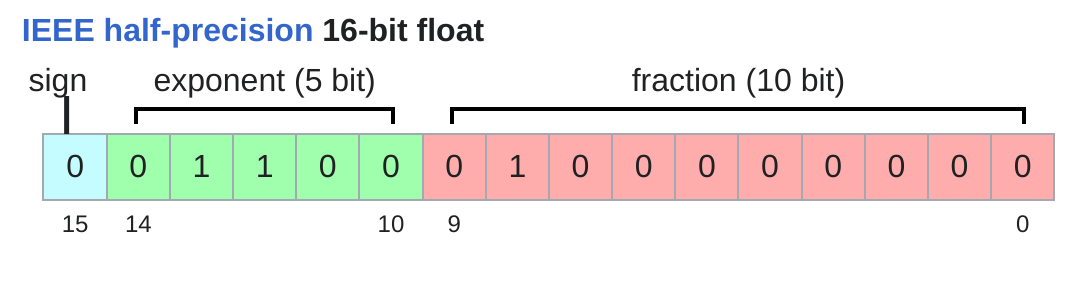
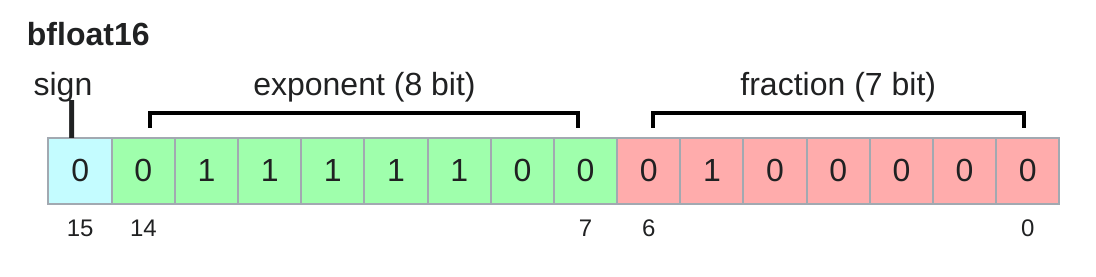
读图:fp16 与 bf16 的差别
fp16 给 mantissa 更多位,数值更细,但动态范围窄;bf16 给 exponent 更多位,动态范围接近 fp32。深度学习训练更怕数值下溢/溢出,因此 bf16 常比 fp16 更稳。
mixed precision 不是简单全改低精度
训练常用 bf16 存 parameters、activations、gradients,但 optimizer state 保留 fp32。这样省显存和带宽,同时让长期统计量保持稳定。
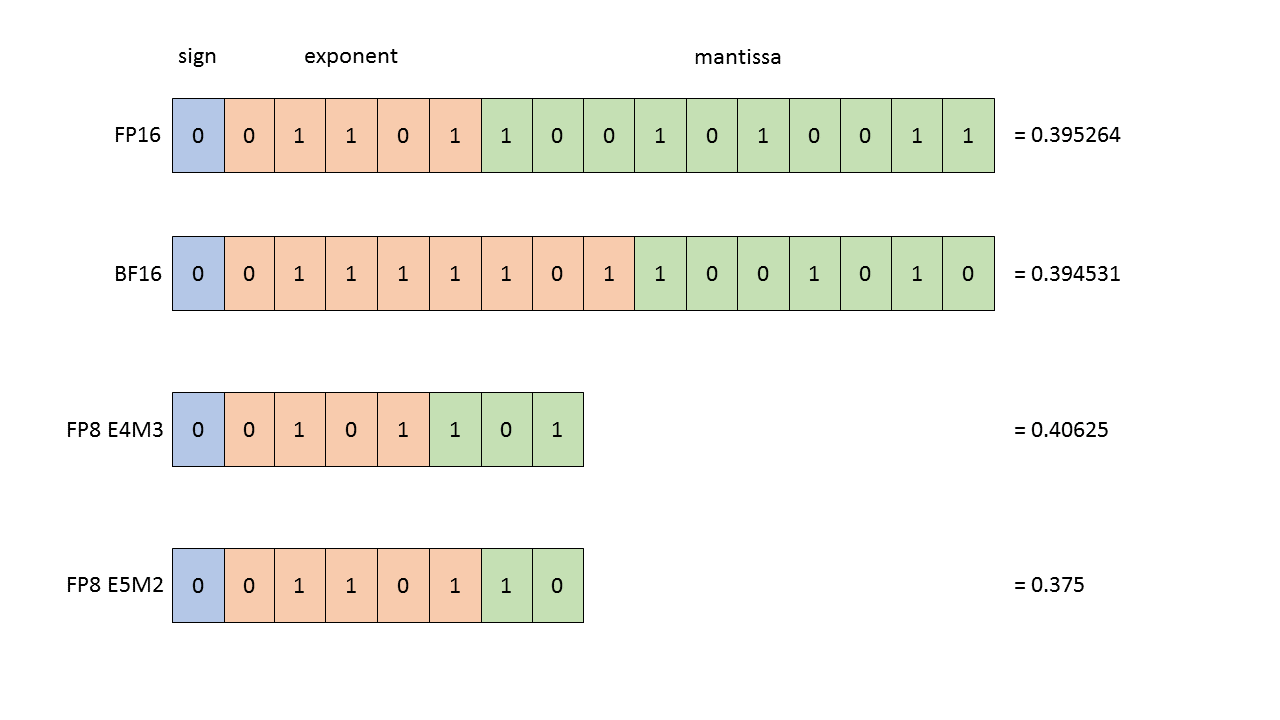
读图:为什么 FP8 有两个格式
E4M3 用 4 位 exponent 和 3 位 mantissa,精度相对好但范围小;E5M2 范围更大但精度更粗。FP8 能否有效使用,取决于硬件、scale 管理和库支持,不只是 dtype 名字。
FP4/NVFP4 进一步把每个值压到 4 bits,通常需要 block-wise scale 扩展动态范围。它更像高度优化库中的系统能力,而不是普通 PyTorch 默认路线。
CPU 与 GPU memory
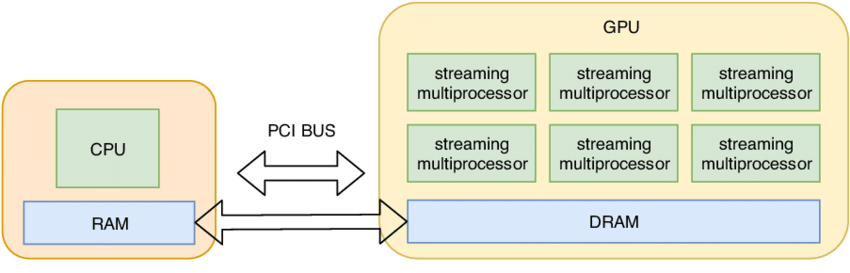
读图:CPU-GPU 图的系统含义
.to(device) 不是语法细节,而是数据移动。大模型训练中,CPU/GPU、GPU/GPU、HBM/SM 之间的每次移动都可能成为瓶颈。Lecture 2 从这里开始把 tensor 运算变成硬件数据流问题。
本章小结
Memory accounting 从 tensor、shape、dtype、device、生命周期开始。低精度能节省显存,但必须理解动态范围;GPU 能提供并行性,但前提是数据在正确位置,并且移动成本可控。
Einops 与 Shape:让维度变成可读账本
PyTorch 的 transpose(-2, -1)、sum(dim=-1) 很强,但隐藏了维度语义。Einops 用命名维度写 tensor operation,让表达式更接近数学。
x = torch.ones(2, 2, 3) # batch seq hidden
y = torch.ones(2, 2, 3) # batch seq hidden
z = x @ y.transpose(-2, -1) # batch seq seq
z = einsum(
x, y,
"batch seq1 hidden, batch seq2 hidden -> batch seq1 seq2"
)
术语消化:einsum、reduce、rearrange
- einsum:按名字指定哪些维度相乘、哪些维度求和、哪些维度保留。
- reduce:沿某些维度做 sum/mean/max/min。
- rearrange:拆分、合并、重排维度,例如把
total_hidden拆成heads hidden。
Shape 错误是隐性 bug
维度顺序错了,代码可能仍能运行,只是语义错。命名维度能减少这类错误,也为 tensor parallelism、sequence parallelism 和 attention head 切分打基础。
本章小结
Einops 代表一种资源核算习惯:每个维度都要有名字。后续计算 FLOPs、activation memory 和 parallelism 时,维度语义比张量本身更重要。
Compute Accounting:FLOPs、FLOP/s 与 MFU
FLOPs 与 FLOP/s
| 术语 | 含义 | 例子 |
|---|---|---|
| FLOPs | floating-point operations,计算总量 | GPT-3 训练约 \(3.14× 10^23\) FLOPs。 |
| FLOP/s | 每秒浮点运算数,硬件或程序速度 | H100 dense bf16 峰值约 \(989.5\) TFLOP/s。 |
| MFU | actual FLOP/s / promised FLOP/s | 模型实际吃满硬件的程度,0.5 已经很好。 |
FLOPs 和 FLOP/s 混淆会毁掉估算
FLOPs 是路程,FLOP/s 是速度。训练时间约等于总 FLOPs 除以有效 FLOP/s。有效速度又取决于 dtype、kernel、通信、shape 和 MFU。
矩阵乘法 FLOPs
若 \(X\in\mathbb{R}^{B\times D}\),\(W\in\mathbb{R}^{D\times K}\),则
每个输出元素需要 \(D\) 次乘法和约 \(D\) 次加法。实际程序还要 benchmark 得到运行时间,再算实际 FLOP/s。
MFU 的正确使用
MFU 不是道德评分,而是诊断工具。MFU 低可能是 memory-bound、通信同步、kernel 太小、shape 不友好、数据加载慢,也可能是测量口径不一致。下一节 arithmetic intensity 会解释其中最常见的一类原因。
本章小结
Compute accounting 的步骤是:从 shape 算 FLOPs,用 benchmark 得实际时间,再与硬件峰值比较。不要只数 FLOPs,还要问这些 FLOPs 是否能高效喂给硬件。
Arithmetic Intensity 与 Roofline
compute-memory 最小模型
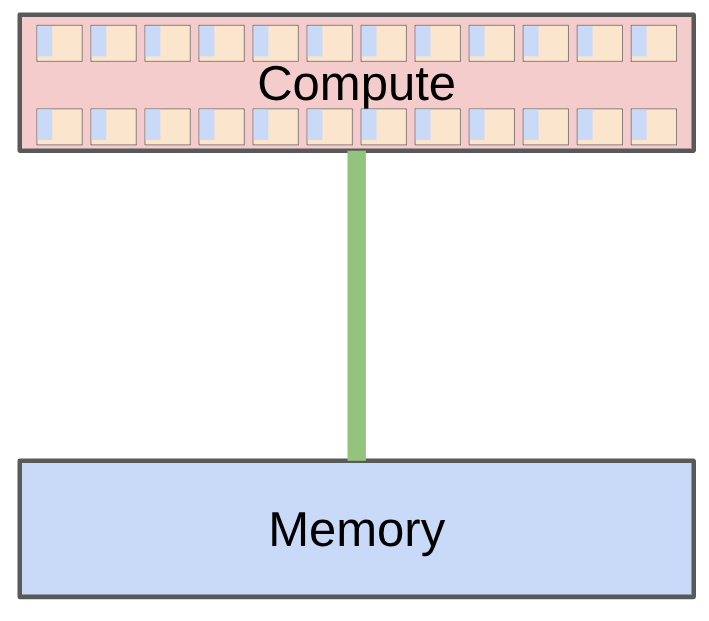
读图:compute-memory 图怎么连接到 roofline
如果每搬 1 byte 数据只做很少计算,硬件主要等 memory;如果每 byte 能复用很多次,硬件才可能接近 compute 峰值。Arithmetic intensity 就是把计算和数据移动放到同一张账本上。
对 H100 dense bf16,峰值约 \(989.5\times 10^{12}\) FLOP/s,HBM bandwidth 约 \(3.35\times 10^{12}\) bytes/s,所以平衡点约 \(295\) FLOPs/byte。
判断瓶颈的规则
Workload intensity 小于 accelerator intensity,则 memory-bound;大于 accelerator intensity,则 compute-bound。
| 操作 | intensity 直觉 | LLM 对应场景 |
|---|---|---|
| ReLU / elementwise | 每个元素少量计算但完整读写 tensor | activation、mask、small kernels,常 memory-bound。 |
| GeLU | 比 ReLU 多算一些,但读写相同 | 单独 kernel 仍常 memory-bound。 |
| Dot product | 有 reduction,但复用有限 | attention/normalization 的局部构件。 |
| Matrix-vector | 读大矩阵服务少量 token | autoregressive decode 常见。 |
| Matrix-matrix | 数据复用高,intensity 随规模增长 | training/prefill 中的大 matmul。 |
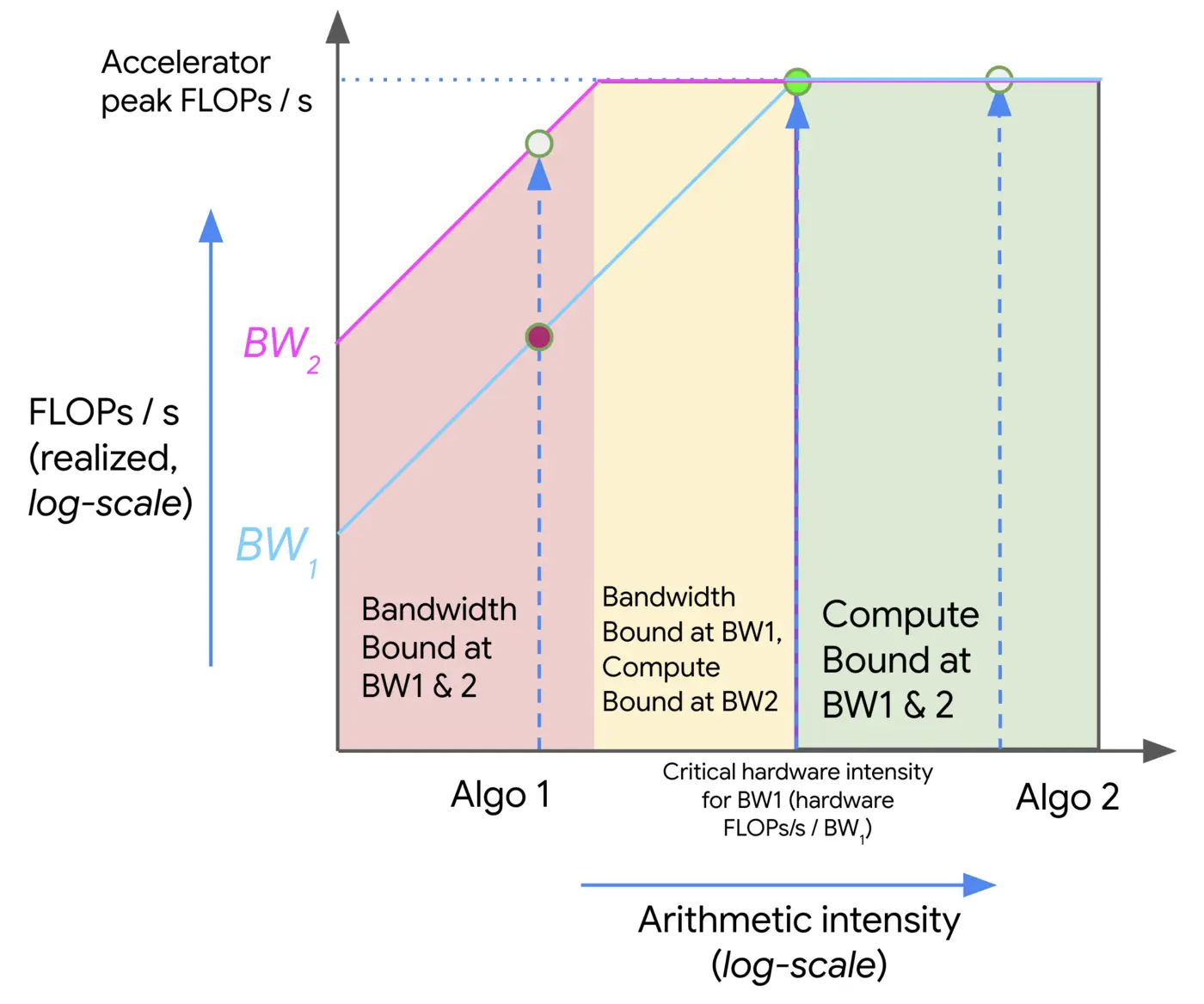
读图:roofline plot 怎么看
横轴是 arithmetic intensity,纵轴是可达 performance。左侧斜线由 memory bandwidth 限制,右侧平台由 peak FLOP/s 限制;拐点是 accelerator intensity。操作落在拐点左边,主要 memory-bound;落在右边,才可能 compute-bound。
roofline 的边界
Roofline 不直接建模 kernel launch latency、cache hierarchy、通信、pipeline bubble、shape padding 和框架 overhead。它是第一层诊断工具,不是完整 profiler。
本章小结
Arithmetic intensity 解释了为什么大 matmul 快、elementwise 小算子慢,也解释了训练和推理的基本差异:训练有大量 matrix-matrix,decode 常退化为 matrix-vector 和 cache 读取。
训练一步的 compute 与 memory
Deep network 账本

读图:deep network 图里的状态
每一层都有参数,forward 产生 activation,backward 需要 activation 和参数来计算 gradients。训练 memory 不是只有 parameters,还包括 gradients、optimizer state 和 activations。
对一层 \(h_2=h_1W_2\),forward 约 \(2BD^2\) FLOPs。Backward 需要:
这两个矩阵乘法各约 \(2BD^2\),所以 backward 是 forward 的约 2 倍。对总参数 \(P\),训练一步粗估:
6BP 公式的地位
这是大模型训练中最常用的粗账本之一。它忽略长上下文 attention 的额外项,但足以做训练时间数量级估计。
Optimizer state 与 training loop
| 状态 | bytes/parameter | 说明 |
|---|---|---|
| Parameter | 2 | bf16 权重。 |
| Gradient | 2 | bf16 梯度。 |
| AdaGrad state | 4 | fp32 累积 squared gradients。 |
| Adam state | 8 | fp32 first moment \(m\) + second moment \(v\)。 |
g2 = state.get("g2", torch.zeros_like(grad))
g2 += torch.square(grad)
state["g2"] = g2
p.data -= lr * grad / torch.sqrt(g2 + 1e-5)
术语消化:SGD、Momentum、AdaGrad、RMSProp、Adam
SGD 只用当前梯度;Momentum 对梯度做指数平均;AdaGrad 用历史梯度平方缩放学习率;RMSProp 对梯度平方做指数平均;Adam 同时维护一阶动量 \(m\) 和二阶动量 \(v\),因此状态显存较大但训练稳定。
for step in range(num_train_steps):
x, y = get_batch()
pred_y = model(x).mean()
loss = F.mse_loss(pred_y, y)
loss.backward()
optimizer.step()
optimizer.zero_grad(set_to_none=True)
zero grad 不是细节
PyTorch 默认会累积 gradients。不清零会把上一步的梯度混入下一步。set_to_none=True 还能减少不必要的显存写入。
本章小结
训练一步可以拆成 forward、backward、optimizer step。Backward 通常约为 forward 的 2 倍;Adam 的 optimizer state 可能比参数本身更占显存;activations 则随 batch、sequence、layers 增长。
Memory Optimization:用资源交换资源
Gradient accumulation
大 batch 提高训练稳定性,但 activation memory 随 batch 增长。Gradient accumulation 把 global batch 切成多个 micro-batches,每个 micro-batch 计算梯度并累积,累积够再 step。
Gradient accumulation 的 tradeoff
它降低每次 forward/backward 的 activation 峰值,但不会减少总 FLOPs;代价是一次参数更新前要跑多个 micro-batches。
Activation checkpointing
Activation checkpointing 也叫 gradient checkpointing 或 rematerialization。它不是“把模型权重保存到磁盘”的 model checkpointing,而是 forward 时只保存部分 activations;backward 需要未保存的 activation 时,从最近 checkpoint 重新计算一段 forward。
读图:同一张 deep network 图的第二种读法
前面这张图用于计算 forward/backward FLOPs;这里它用于追踪 activation 生命周期。若保存每层输出,显存是 \(O(L)\);若只保存检查点,中间 activation 可以重算,从而用更多 compute 换更少 memory。
| 策略 | activation memory | compute overhead |
|---|---|---|
| 存所有层 | \(O(L)\) | 无额外重算。 |
| 不存中间层 | \(O(1)\) | 可能 \(O(L^2)\),每层 backward 前从头重算。 |
| 每 \( L\) 层存 checkpoint | \(O( L)\) | \(O(L)\) 级别重算,常见折中。 |
内存优化不是免费午餐
Gradient accumulation 用更多 micro-step 换更低 activation 峰值;activation checkpointing 用重算换显存;ZeRO/FSDP 用通信换显存。所有技巧都是资源交换,必须放回整体训练时间和稳定性中判断。
端到端训练前 checklist
| 检查项 | 手算方法 | 失败信号 |
|---|---|---|
| 参数量 | 逐层数矩阵大小,或粗估 \(P\) | 参数相关显存已超设备容量。 |
| 训练 FLOPs | \(C≈ 6P D_tokens\) | 训练时间远超预算。 |
| 参数/梯度/优化器显存 | bf16 参数 2B、梯度 2B、Adam state 8B/param | 不算 activation 都放不下。 |
| Activation memory | 粗估 \(O(BSLD)\) 或 profiler 外推 | batch/context 一大就 OOM。 |
| Arithmetic intensity | FLOPs / bytes moved | 太低说明 kernel 可能 memory-bound。 |
| MFU | actual FLOP/s / promised FLOP/s | 远低于 0.5 需要检查 kernel、通信和数据加载。 |
本章小结
Memory optimization 的核心是 tradeoff。没有一种技巧单独解决所有问题;实际大模型训练往往组合 gradient accumulation、checkpointing、ZeRO/FSDP、tensor/pipeline parallelism 和 kernel fusion。
补充推导:把本讲公式真正用起来
从 dtype 到显存:三个数量级例子
下面三个例子把 dtype 账本落到真实 LLM 场景。
| 对象 | 估算 | 含义 |
|---|---|---|
| 单个 GPT-3 FFN 矩阵 | \(12288× 4· 12288\) 个参数,bf16 约 1.2GB,fp32 约 2.4GB | 单层矩阵已经是 GB 级,不能把权重读写当成免费。 |
| 70B bf16 参数 | \(70B× 2≈ 140\)GB | 只存参数就超过单张 80GB H100。 |
| 70B AdamW 状态 | 参数 140GB + 梯度 140GB + Adam state 560GB | 不 sharding 时,训练状态远大于参数本身。 |
为什么 optimizer state 经常比模型更吓人
很多人第一次估算显存只算参数,这是错误的。AdamW 的两个 fp32 state 各自和参数数量一样大:\(m\) 记录梯度方向的一阶指数平均,\(v\) 记录梯度平方的二阶指数平均。若参数是 bf16,两个 fp32 state 合计是参数显存的 4 倍。
Einops worked examples:维度如何决定算子语义
# x: [batch, seq1, hidden]
# y: [batch, seq2, hidden]
# hidden appears on the left but not the right, so it is summed over.
z = einsum(x, y, "batch seq1 hidden, batch seq2 hidden -> batch seq1 seq2")
# x: [seq, total_hidden], total_hidden = heads * hidden1
x = rearrange(x, "seq (heads hidden1) -> seq heads hidden1", heads=2)
x = einsum(x, w, "seq heads hidden1, hidden1 hidden2 -> seq heads hidden2")
x = rearrange(x, "seq heads hidden2 -> seq (heads hidden2)")
Einops 不是语法糖这么简单
命名维度让你在写代码时显式声明哪些维度被求和、哪些维度被保留、哪些维度被拆分。这正是后续 attention、tensor parallelism、sequence parallelism 的语言。
Arithmetic intensity worked examples
对 bf16 ReLU,读 \(x\) 和写 \(y\) 各 2 bytes,计算约 1 FLOP/element:
对 bf16 matrix-vector product,\(x\in\mathbb{R}^n\)、\(W\in\mathbb{R}^{n\times n}\):
对 bf16 matrix-matrix multiplication,\(X,W\in\mathbb{R}^{n\times n}\):
为什么 matmul 是训练的朋友,matvec 是推理的麻烦
Matrix-matrix 让同一块权重被许多 batch/sequence 位置复用,\(I\) 随 \(n\) 增长;matrix-vector 每次只服务少量 token,读完整权重却复用很少。这就是训练 prefill 容易 compute-bound,而 autoregressive decode 容易 memory-bound 的根源。
训练状态生命周期图
| 阶段 | 状态变化 |
|---|---|
| Get batch | data 从 CPU/dataloader 进入 GPU。 |
| Forward | 读取 parameters,写 activations,产生 logits/loss。 |
| Backward | 读取 activations 和 parameters,写 gradients;部分 activations 可逐层释放。 |
| Optimizer step | 读取 gradients 和 optimizer state,更新 parameters、\(m\)、\(v\)。 |
| Zero grad | 清理 gradients,准备下一步;若不清理会累积。 |
生命周期比总量更重要
峰值显存取决于哪些 tensor 同时存在。Parameters 和 optimizer state 常驻;activations 在 backward 中逐渐释放;temporary buffers 只在 kernel 调用期间存在。Profiler 看到的是生命周期重叠后的峰值,而不是简单加总。
ZeRO、checkpointing、accumulation 如何组合
| 技术 | 主要省什么 | 主要代价 |
|---|---|---|
| Gradient accumulation | 降低每个 micro-batch 的 activation 峰值 | 多次 forward/backward 才更新一次参数。 |
| Activation checkpointing | 少存中间 activations | backward 时重算 forward 片段。 |
| ZeRO-1 | optimizer state | optimizer step 需要跨卡协调。 |
| ZeRO-2 | optimizer state + gradients | 梯度 reduce-scatter 等通信增加。 |
| ZeRO-3 | optimizer state + gradients + parameters | forward/backward 前后需要 all-gather 参数,通信更多。 |
不要把 ZeRO 当成 tensor parallelism
ZeRO 是 data parallel 框架里的状态分片技术,核心是减少重复存储;tensor parallelism 是把单层矩阵计算切到多卡上,核心是拆计算。两者经常组合,但解决的问题不同。
逐节点补充:源码中的资源核算细节
motivating questions 的完整推导
第一个问题“70B on 15T tokens on 1024 H100s”可以拆成三层:模型计算量、硬件有效速度、训练天数。
H100 dense bf16 峰值按 \(1979/2\) TFLOP/s 估算,乘以 MFU 0.5 和 1024 张卡:
训练天数为:
这个 144 天不是承诺排期
它没有算 dataloader、checkpoint、通信、故障恢复、验证、warmup、重启、调参和集群排队。它只是告诉你:这个训练不是“几天跑完”的量级,必须靠 scaling law 和小实验减少盲试。
第二个问题“8 H100 using AdamW 最大模型”同样要拆开:
| 状态 | 每参数字节 | 说明 |
|---|---|---|
| 参数 | 2 | bf16 参数。 |
| 梯度 | 2 | 训练时 backward 产生,常用 bf16。 |
| Adam 一阶动量 | 4 | fp32 \(m\)。 |
| Adam 二阶动量 | 4 | fp32 \(v\)。 |
总计 12 bytes/parameter。8 张 80GB H100 总共 640GB,除以 12 得到约 53B 参数。但这只是参数相关状态,不含 activations,所以真实可训练规模更小。
dtype 数值范围为什么影响训练稳定性
fp16 的问题不是“精度少一点”这么简单,而是 exponent 位数少导致动态范围窄。比如 \(10^{-8}\) 这类小数可能在 fp16 下直接 underflow 成 0;如果梯度或 optimizer 统计出现类似情况,训练会不稳定。bf16 牺牲 mantissa 精度,保留 fp32 的 exponent 宽度,所以更适合大模型训练。
AMP 的实用直觉
Automatic Mixed Precision 并不是把所有操作都换成低精度。矩阵乘法、卷积等通常能安全使用 bf16/fp16;softmax、exp、optimizer state、某些 reduction 更需要高精度。AMP 的价值是把这些选择自动化,但理解背后的 dtype 账本仍然重要。
FLOPs 计数里的“乘加各一次”
矩阵乘法 \(Y=XW\),输出元素为:
对每个 \((i,k)\),需要 \(D\) 次乘法和约 \(D\) 次加法,所以近似 \(2D\) FLOPs。输出共有 \(B\times K\) 个元素,因此:
为什么 FLOPs 计数要保留近似意识
严格说加法是 \(D-1\) 次,不是 \(D\) 次;但大模型资源估算关注数量级,\(2BDK\) 的近似足够好。真正危险的是漏掉 backward 或 optimizer state,而不是纠结 \(-1\) 项。
从 arithmetic intensity 到 kernel 优化策略
如果一个操作 memory-bound,提高 peak FLOP/s 不一定有帮助,因为计算单元在等数据。常见优化方向是:
- fusion:把多个小 kernel 合并,减少中间结果写回 HBM。
- tiling:让数据块进入 SRAM/cache 后被多次复用。
- layout change:改变 tensor 排布,让访问连续、coalesced。
- batching:增大矩阵维度,提高权重复用。
first-use glossary:HBM、SRAM 和 fusion
HBM 是 High Bandwidth Memory,GPU 上的大容量高带宽显存;SRAM 是 Static Random-Access Memory,通常指芯片内部更小但更快的片上存储/cache。Fused kernel 的目标是让数据从 HBM 读入后,在片上连续完成多个操作,最后只写回一次,从而减少 HBM 往返。
Activation checkpointing 与 model checkpointing 的区别
这两个词都叫 checkpoint,但意思完全不同:
| 术语 | 保存什么 | 目的 |
|---|---|---|
| Model checkpointing | 参数、optimizer state、训练步数等写到磁盘 | 故障恢复、保存模型版本。 |
| Activation checkpointing | forward 中只保存部分中间 activations | 用重算换显存,支持更深模型/更大 batch。 |
不要把两种 checkpoint 混为一谈
Model checkpointing 面向训练任务生命周期;activation checkpointing 面向单次 forward/backward 内部的显存峰值。前者通常增加 I/O,后者通常增加 compute。
总结与延伸
Lecture 2 建立了大模型训练的最小资源语言:
- Tensor 是 data、parameters、gradients、optimizer state、activations 的统一载体。
- Memory 由 numel、dtype、device 和生命周期决定。
- FLOPs 是计算量,FLOP/s 是速度,MFU 衡量有效硬件利用率。
- Arithmetic intensity 判断 memory-bound 和 compute-bound。
- 训练一步常用 \(6BP\) 粗估,但 memory 还要算 optimizer state 和 activations。
- Gradient accumulation、activation checkpointing、ZeRO/FSDP 都是资源交换。
最终 takeaway
Resource accounting 是 CS336 的工程底座。不会算 FLOPs、memory 和 bandwidth,就无法判断一个训练 recipe 是否可行,也无法理解后续 kernels、parallelism、inference 和 scaling laws 为什么这样设计。
拓展阅读
- JAX Scaling Book: roofline and systems chapters.
- NVIDIA H100/B200 datasheets and Transformer Engine FP8 documentation.
- PyTorch AMP, activation checkpointing, and optimizer documentation.
- Transformer memory and FLOPs accounting blog posts.