CS336 2026 Lecture 7:Parallelism 与分布式训练基础
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于 Stanford CS336 Spring 2026 官方可执行讲义重新整理 |
| 来源 | Stanford CS336 |
| 日期 | 2026 年春季 |
本讲主线:从单卡局部性到集群局部性
Lecture 5 和 Lecture 6 讲的是单张 GPU 内部的并行:如何让 tensor core 吃饱,如何用 fusion 和 tiling 减少 HBM 往返,如何用 Triton 把一个算子写成更接近硬件的数据搬运程序。Lecture 7 把同一个问题放大到多 GPU 和多节点。官方源文件把这一部分命名为 Part 1: building blocks of distributed communication/computation,然后再进入 Part 2: distributed training。这两个名字很重要:先学通信语言,再学训练策略。
术语消化:本讲第一批系统词
| 术语 | 字面含义 | 本讲中的作用 |
|---|---|---|
| HBM | High Bandwidth Memory,高带宽显存,是 GPU 上的 DRAM 形态。 | 单卡上参数、激活和中间张量主要存放在这里;上一讲优化 HBM traffic,本讲则把瓶颈扩展到 GPU 间通信。 |
| sharding | 分片;把原本完整复制的数据切开,让每张 GPU 只存其中一部分。 | ZeRO/FSDP、tensor parallel、pipeline parallel 都是在不同对象上做 sharding。 |
| ZeRO | Zero Redundancy Optimizer;在 data parallel rank 之间分片 optimizer state、gradients、parameters,常按 stage 1/2/3 区分。 | 本讲先用 all-gather 和 reduce-scatter 建立直觉,下一讲会系统解释 ZeRO/FSDP 如何降低显存。 |
| collective | 集合通信;所有 rank 共同进入同一个通信原语。 | 分布式训练的基本词汇,后面所有并行策略都能拆成若干 collectives。 |
读图:这张节点拓扑图应该怎么看
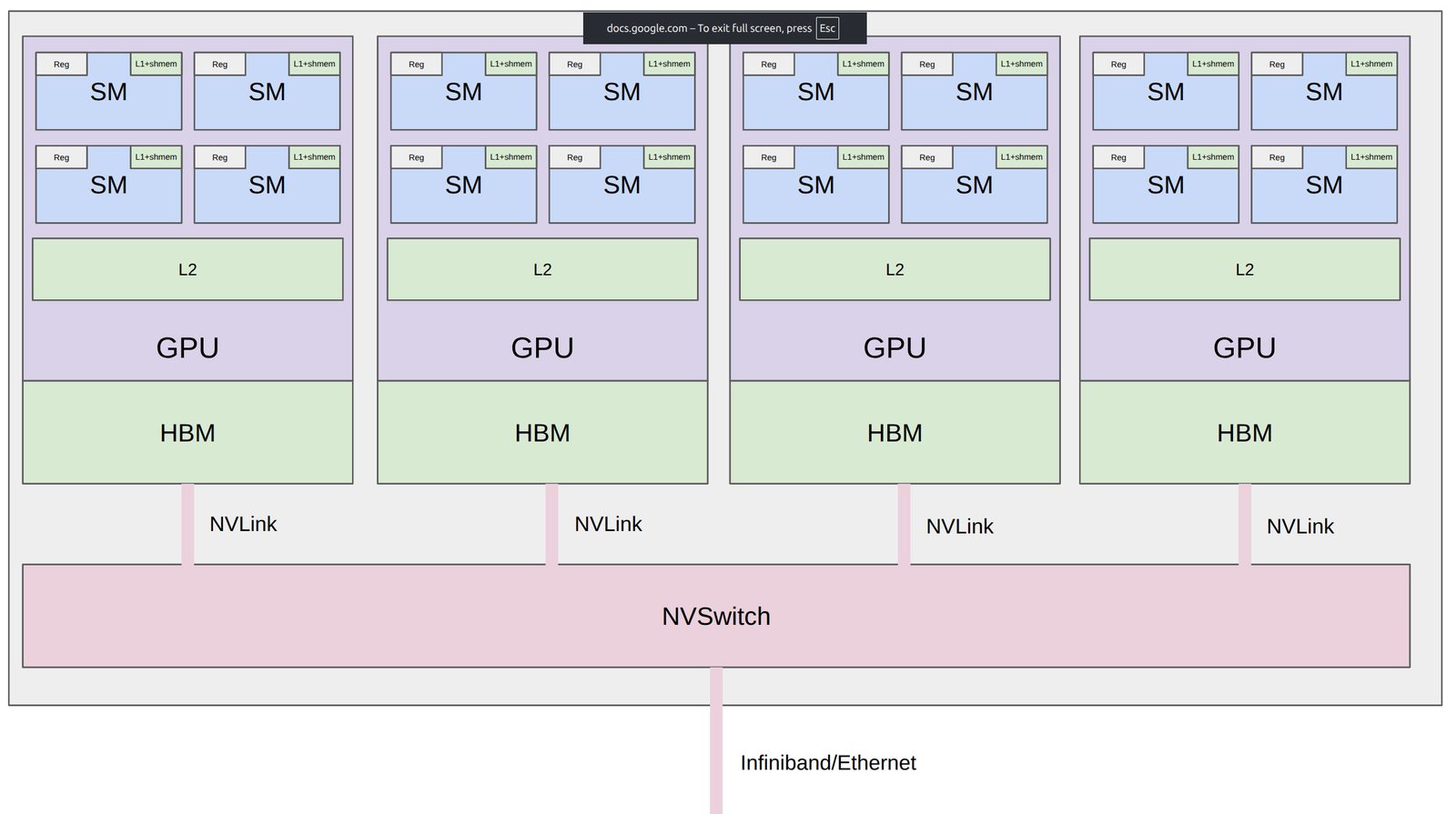
先看最内层:每张 GPU 旁边都有自己的 HBM,计算单元访问本卡 HBM 比访问其他 GPU 的数据快得多。再看节点内互连:NVLink/NVSwitch 把多张 GPU 连成一个高带宽域,适合频繁交换激活或分片参数。最后看节点外:HCA/NIC、交换机、跨机链路把节点连成集群,带宽和延迟都明显更差。因此同样是“通信”,在一台机器里和跨机器的含义不同;tensor parallel 这种每层通信的策略必须尽量放在快互连上,data/pipeline parallel 这种通信频率较低的策略更能承受慢链路。
统一主题:compute 离 data 总是有距离
单卡性能工程是在 HBM、cache、register 之间安排数据;多卡性能工程是在 GPU、node、pod 之间安排数据。上一讲用 fusion/tiling 减少内存访问,本讲用 replication/sharding 减少或重排通信。真正的问题不是“用了多少张卡”,而是每一步训练中数据必须移动多远、移动多少、何时移动。
为什么要多 GPU
多 GPU 的动机可以分成两类。第一类是容量:模型参数、梯度、optimizer state 和激活放不进一张卡。第二类是速度:单卡算力太小,训练 wall-clock time 不可接受,需要更多 FLOPs。实际大模型训练通常先被容量推着走,然后再被速度逼着优化并行效率。
其中 \(M_{\text{params}}\) 是权重显存,\(M_{\text{grads}}\) 是反向传播后的梯度,\(M_{\text{optimizer}}\) 是 Adam/AdamW 的一阶动量 \(m\) 和二阶动量 \(v\) 等状态,\(M_{\text{activations}}\) 是前向保存给反向使用的激活。这个公式不是精确预算,而是告诉我们:训练显存不是只由参数量决定。
多 GPU 不是自动加速按钮
更多 GPU 只提供潜在算力。若每个 step 的通信量太大、通信无法与计算重叠、或并行策略与硬件拓扑不匹配,实际吞吐可能几乎不涨,甚至因为同步和调度开销变慢。
泛化的层次结构
| 层次 | 典型介质 | 优化含义 |
|---|---|---|
| 单 GPU 片上 | registers、L1、shared memory | fusion、tiling、kernel design,尽量不把中间结果写回 HBM。 |
| 单 GPU 片外 | HBM | 提高 arithmetic intensity,减少 HBM traffic。 |
| 单节点多 GPU | NVLink、NVSwitch、PCIe | 可承载较频繁 collective,但仍比本卡内存慢。 |
| 多节点多 GPU | InfiniBand、RoCE、Ethernet | 适合较粗粒度并行,必须减少同步次数并隐藏延迟。 |
本章小结
Lecture 7 的主线是:把一个训练 step 拆成本地计算、状态放置、通信原语、硬件路径四层来看。后面所有 data parallelism、tensor parallelism、pipeline parallelism 都是这四层的不同组合。
Collective Operations:分布式训练的通信积木
rank、world size 与 process group
分布式程序通常让每张 GPU 对应一个进程。每个进程有一个 rank,表示它在通信组里的编号;world size 是通信组里的 rank 总数;process group 是一组共同参与通信的 rank。一个模型可能同时有 data-parallel group、tensor-parallel group、pipeline group,因此 rank 的“全局编号”和“某个 group 内编号”要区分清楚。

读图:rank 图在说明什么
图中每个方块代表一个参与通信的进程或 GPU。rank 不是“机器号”,也不是“模型层号”,而是 collective API 里用来指定参与者身份的编号。world size 是这个通信世界有多少参与者。读这张图时要注意:同一个物理 GPU 在不同 process group 里可能有不同的局部 rank,因此真实训练框架里常常要同时维护 global rank、local rank、data parallel rank、tensor parallel rank。
collective 的执行约束
collective operation 是所有参与 rank 共同执行的通信模式。所有 rank 必须以相同顺序进入同一个 collective,并且张量 shape、dtype、op 语义要匹配。某个 rank 少调用一次 \code{all_reduce},其他 rank 就可能永久等待。
术语消化:从基础原语到工作马
| Collective | 做什么 | 典型用途 | 记忆方式 |
|---|---|---|---|
| broadcast | 一个 rank 的完整张量复制给所有 rank。 | rank 0 读取 checkpoint 后同步初始权重。 | 一人发,全员收。 |
| scatter | 一个 rank 的张量切成多份,分别发给各 rank。 | 理解 reduce-scatter 的基础。 | 切开再分发。 |
| gather | 各 rank 的分片收集到一个 rank。 | 诊断、评估、单点聚合。 | scatter 的反向。 |
| reduce | 各 rank 张量按 sum/min/max 等归约到一个 rank。 | 指标聚合、小规模统计。 | 先算再收。 |
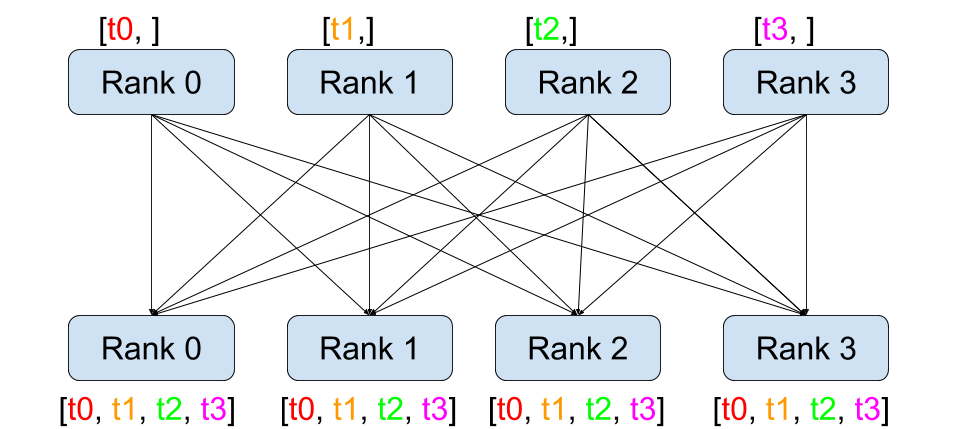
| all-gather | gather 的结果给到所有 rank。 | 参数分片前向前拼回完整参数。 | gather 到所有人。 |
| reduce-scatter | 先 reduce,再把结果分片给各 rank。 | ZeRO/FSDP 梯度同步后只保留本 rank 分片。 | all-reduce 的前半段。 |
| all-reduce | reduce 后所有 rank 都拿到完整结果。 | DDP 梯度同步。 | reduce-scatter + all-gather。 |
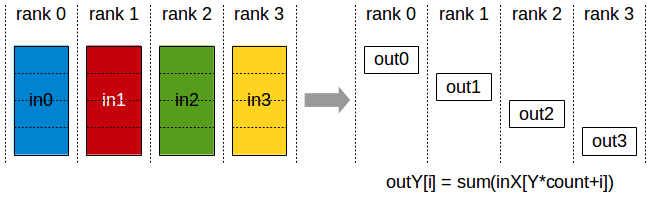
| all-to-all | 每个 rank 都给每个 rank 发送一部分。 | MoE token routing、expert parallelism。 | 分布式矩阵转置。 |
broadcast、scatter、gather、reduce
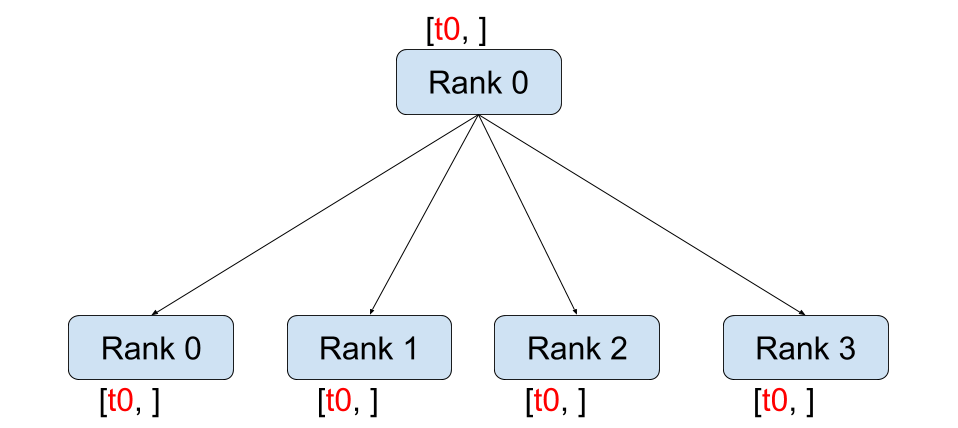
读图:broadcast 的含义
图中只有一个 rank 拥有完整输入,通信后所有 rank 都得到相同副本。这种模式适合“小而关键”的同步,例如初始化权重、广播配置、广播随机种子。它不是训练主路径里最高频的原语,因为频繁广播大张量意味着每一步都在复制状态。
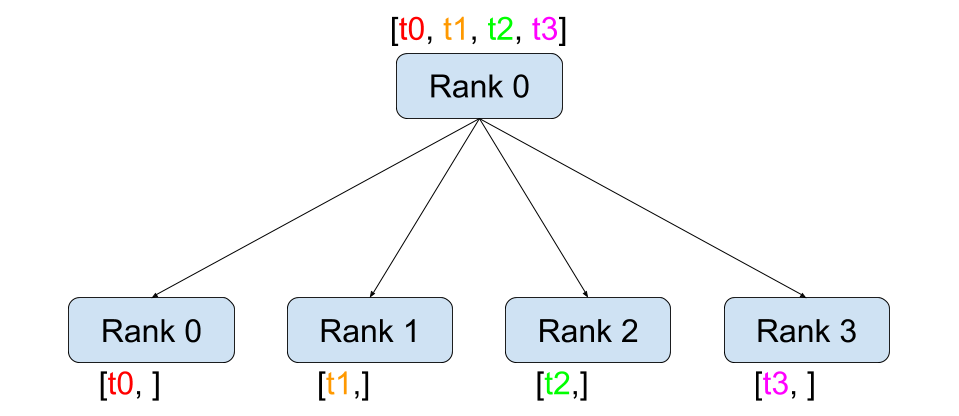
读图:scatter 的含义
scatter 的输出不是每个 rank 拿到完整数据,而是每个 rank 拿到自己的切片。它最重要的教学价值是帮我们理解“分片后的所有权”:切片一旦分发出去,后续计算就应该尽量在拥有该切片的 rank 上发生,否则会重新引入通信。
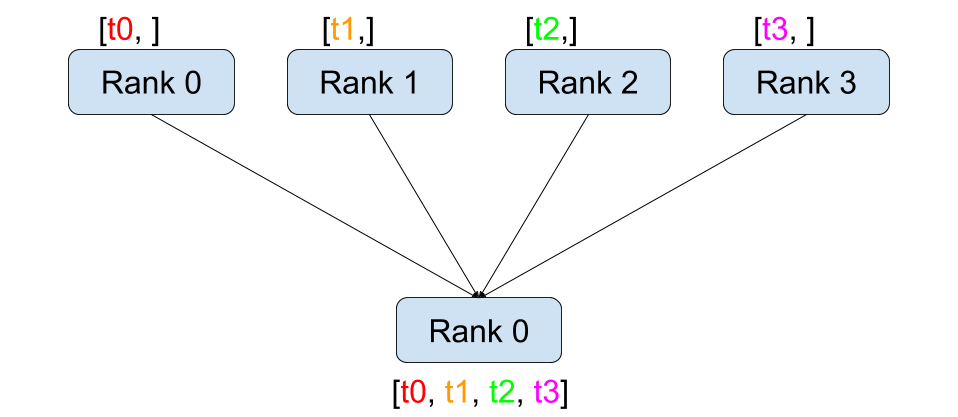
读图:gather 的含义
gather 是 scatter 的反向。图中多个 rank 各自持有一片数据,通信后某个目标 rank 拿到完整拼接结果。它在训练主循环中要谨慎使用,因为单个目标 rank 会成为内存和带宽热点;all-gather 则把这个完整结果复制给所有 rank。
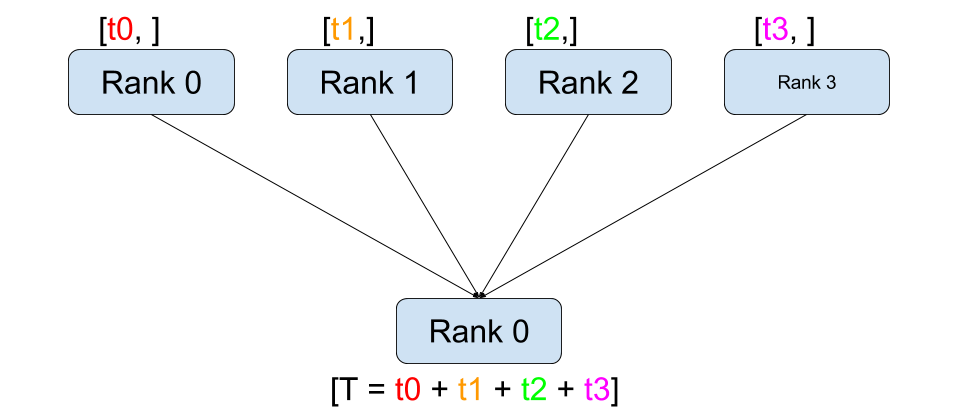
读图:reduce 的含义
reduce 不是简单拼接,而是对对应位置做 sum、min、max 等结合律/交换律操作。训练里最常见的是对梯度求和或平均。若只把结果放到 rank 0,rank 0 后续会成为单点;因此大规模训练更常用 all-reduce 或 reduce-scatter。
基础 collective 的常见误解
broadcast 和 gather 都会产生完整副本,但语义不同:broadcast 是一份输入复制到多人,gather 是多人输入汇总到一人。scatter 和 reduce-scatter 都让每个 rank 得到分片,但 reduce-scatter 在分片前还做了跨 rank 归约。
all-gather、reduce-scatter、all-reduce
读图:all-gather 为什么是参数分片的关键
如果每个 rank 只保存参数的一部分,那么某一层 forward 可能需要临时看到完整权重。all-gather 的作用就是把各 rank 的参数 shard 拼回来,并让每个 rank 都得到完整参数。它节省的是长期存储,不是通信:每次需要完整参数时,通信仍然会发生。
读图:reduce-scatter 在 ZeRO/FSDP 中做什么
图中每个 rank 起初都有一组向量,通信后每个 rank 只拿到归约结果的一片。把这个逻辑放到训练里:每个 data shard 产生梯度,梯度需要跨 rank 求和;但如果参数或 optimizer state 已经分片,就没有必要让每张卡都保存完整梯度。reduce-scatter 正好把“同步”和“分片保存”合成一步。
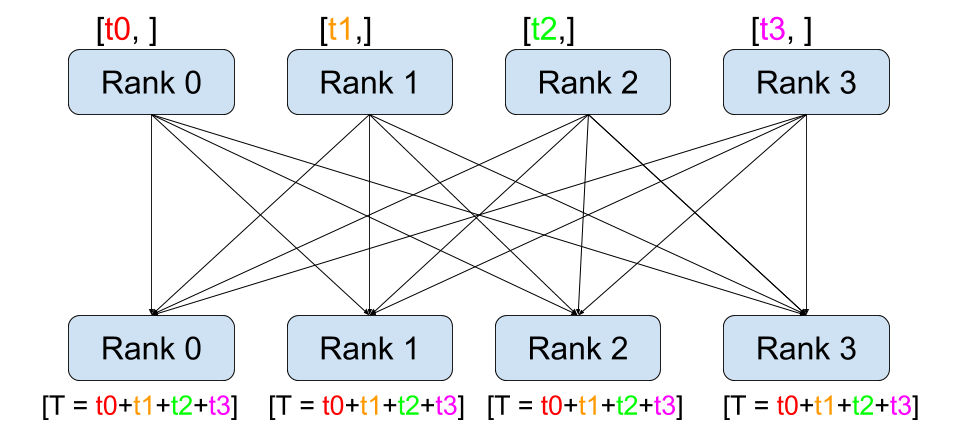
读图:all-reduce 是 DDP 的心脏
在 data parallelism 中,每个 rank 使用不同 batch slice 做 forward/backward,因此梯度一开始不同。all-reduce 把所有 rank 的梯度求和或平均后,再把同一份结果交给所有 rank。于是每个 rank 虽然看过不同数据,但参数更新保持一致。
核心恒等式
左边的语义是“所有人得到完整归约结果”。右边先让每个人得到归约结果的一片,再把这些片重新拼给所有人。这个拆分是从 DDP 走向 ZeRO/FSDP 的关键:如果后续并不需要每个人长期保存完整结果,就可以停在 reduce-scatter,省掉复制状态。
all-to-all:MoE 的通信核心
all-to-all 是最一般的 collective:每个 rank 都向每个 rank 发送一段张量。官方讲义强调它对 MoE 很重要,因为 expert parallelism 中,每个 rank 可能持有一部分 experts;token 先在本地 batch 中产生,然后必须被路由到拥有对应 expert 的 rank 上。
术语消化:all-to-all 与 MoE
| 术语 | 机制 | 为什么影响训练系统 |
|---|---|---|
| expert parallelism | 不同 rank 保存不同 experts,token 根据 router 分发。 | 参数容量增加,但 token routing 触发 all-to-all。 |
| balanced split | 每个 rank 发出/接收的数据量接近。 | all-to-all 更像规则矩阵转置,通信更可预测。 |
| unbalanced split | 某些 expert 热门,部分 rank 接收过多 token。 | 慢 rank 决定 step time,load balancing 变成系统问题。 |
all-to-all 不只是“通信量大”
all-to-all 的难点还包括负载不均、变长 token dispatch、buffer 管理、跨节点拥塞和反向传播中的路由一致性。MoE 的 router 如果只优化模型 loss,不控制负载,系统吞吐会被少数热门 experts 拖垮。
本章小结
Collectives 是分布式训练的基础语言。读懂本讲后,看到 DDP、FSDP、tensor parallel、pipeline parallel、MoE 时,不应只记名字,而应追问:这个策略使用了哪些 collective,通信对象是什么,结果是复制还是分片。
硬件互连:拓扑决定可承受的通信频率
从家用拓扑到数据中心拓扑
官方讲义先给出一个“classic in the home”的对比:同一台机器里的 GPU 通过 PCIe 连接,不同机器通过普通 Ethernet 连接。这个图不是为了讲家庭装机,而是为了强调:如果跨机器通信还要经过 CPU 网络栈,训练系统很快会被数据搬运拖死。
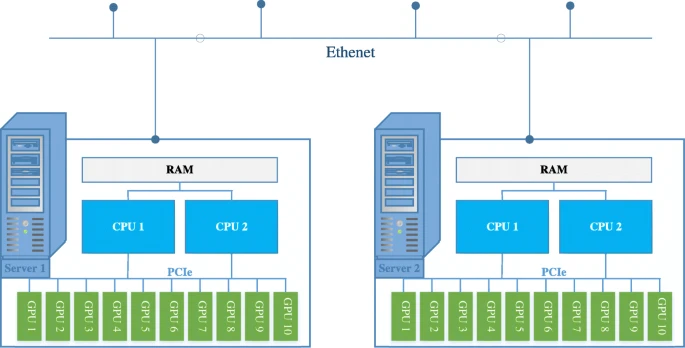
读图:为什么普通拓扑不够训练大模型
这张图的重点是“路径”。GPU 到 GPU 的数据若必须先过 PCIe、CPU 内存、内核网络栈、NIC,再穿过以太网到另一台机器,路径中的每一层都会增加延迟并消耗带宽。大模型训练的同步张量动辄 GB 级,普通网络设计主要服务通用 I/O,不是为每个训练 step 高频搬运梯度和激活而生。
读图:现代拓扑如何支持不同并行策略
图中蓝色 GPU 域适合高频通信,因为 NVLink/NVSwitch 的带宽远高于跨节点链路。节点间通过 HCA/NIC 接入 InfiniBand 或 RoCE,适合 data parallel 的梯度同步、pipeline stage 边界传激活等相对粗粒度通信。读这张图时应把每种并行策略放到拓扑上:tensor parallel 的每层 all-gather/all-reduce 尽量留在节点内,pipeline parallel 的 stage 边界才更可能跨节点。
带宽数量级和路径差异
官方源给出的数量级是:PCIe 7.0 x16 约 \(242\) GB/s,B200 的 NVLink 5.0 节点内可达 TB/s 量级,HBM 约 \(8\) TB/s,而跨节点 InfiniBand 链路可能只有 \(0.05\) TB/s 量级。具体硬件会变化,但排序稳定:片上/本卡最快,节点内互连其次,跨节点最慢。
其中 \(T_{\text{comm}}\) 是一次通信时间,\(\alpha\) 是启动延迟和同步开销,\(S\) 是需要移动的数据量,\(B_{\text{effective}}\) 是实际有效带宽。小张量通信常被 \(\alpha\) 主导,大张量通信常被带宽主导。
不要把规格表带宽当成训练吞吐
规格表数字通常是单链路或理想条件下的峰值。训练中还有拓扑竞争、协议开销、NCCL algorithm 选择、张量大小、同步点、反向传播依赖等因素。并行策略选择必须用实际 benchmark 校准。
RDMA、InfiniBand 与 RoCE
RDMA 是 Remote Direct Memory Access,意思是一台机器可以在较少 CPU 介入的情况下直接读写另一台机器的内存或 GPU 相关 buffer。InfiniBand 原生支持 RDMA;RoCE 是 RDMA over Converged Ethernet,在以太网上提供类似能力,但部署和拥塞控制复杂度不同。对训练来说,绕过 CPU 的价值在于减少数据拷贝和内核网络栈开销,让 GPU 间同步更接近“设备到设备”的路径。
硬件抽象的边界
NCCL 和 PyTorch 可以隐藏 API 细节,但不能消除物理层级。一个每层都通信的 tensor-parallel 模型放到慢跨节点链路上,仍然会慢;一个 pipeline stage 切得不均匀,即使网络很快,也会被最慢 stage 决定吞吐。
NVIDIA Collective Communication Library (NCCL)
NCCL,即 NVIDIA Collective Communication Library (NCCL),把 all-reduce、all-gather、reduce-scatter 等 collective 映射到底层 GPU 通信路径。它会检测拓扑,选择 ring/tree 等算法,启动 GPU kernel 来收发数据。PyTorch 的 \code{torch.distributed} 在 GPU 场景下常用 NCCL backend。
术语消化:NCCL 负责什么,不负责什么
| 层次 | NCCL 能做 | NCCL 不能替你做 |
|---|---|---|
| 拓扑感知 | 识别 GPU、NVLink、PCIe、NIC 的连接关系。 | 改变硬件带宽或跨节点物理距离。 |
| 算法选择 | 为 collective 选择 ring、tree 等通信算法。 | 减少模型本身要求的同步语义。 |
| 执行路径 | 用 GPU kernel 发送/接收数据,减少 CPU 干预。 | 自动决定模型应该怎么 sharding。 |
本章小结
并行策略不是抽象数学题,而是拓扑选择题。通信频率越高,越要靠近高速互连;通信越粗粒度,越能跨慢链路。硬件决定“哪些策略值得尝试”,benchmark 决定“具体怎么切”。
\section{\texorpdfstring{\code{torch.distributed}}{torch.distributed}:把 collective 写成代码}
初始化和 process group
官方讲义用 \code{torch.multiprocessing.spawn} 启动多个进程,每个进程运行同一个函数,但传入不同 \code{rank}。然后用 \code{dist.init_process_group} 建立通信环境。若有 GPU,就用 NCCL;否则用 Gloo。
def setup(rank: int, world_size: int):
os.environ["MASTER_ADDR"] = "localhost"
os.environ["MASTER_PORT"] = "15623"
if torch.cuda.is_available():
dist.init_process_group("nccl", rank=rank, world_size=world_size)
else:
dist.init_process_group("gloo", rank=rank, world_size=world_size)
一个 rank 通常对应一个进程
在 PyTorch DDP 风格中,常见做法是 one process per GPU。这样每个进程只管理一张卡,CUDA context、随机种子、通信 rank 都更清晰。多机训练时还要区分 local rank 和 global rank:local rank 决定本机第几张 GPU,global rank 决定全局通信身份。
all-reduce 示例
官方代码中,每个 rank 先构造一个不同的向量:
data = tensor([0., 1, 2, 3], device=cuda_if_available(rank)) + rank
dist.all_reduce(tensor=data, op=dist.ReduceOp.SUM, async_op=False)
若 world size 为 4,四个输入分别是 \([0,1,2,3]\)、\([1,2,3,4]\)、\([2,3,4,5]\)、\([3,4,5,6]\),sum all-reduce 后每个 rank 都得到 \([6,10,14,18]\)。这正是 DDP 梯度同步的形状:每张卡最初有自己的梯度,通信后每张卡有相同平均梯度。
reduce-scatter + all-gather 示例
input = torch.arange(world_size, dtype=torch.float32,
device=cuda_if_available(rank)) + rank
output = torch.empty(1, device=cuda_if_available(rank))
dist.reduce_scatter_tensor(output=output, input=input,
op=dist.ReduceOp.SUM, async_op=False)
input = output
output = torch.empty(world_size, device=cuda_if_available(rank))
dist.all_gather_into_tensor(output_tensor=output,
input_tensor=input, async_op=False)
这段代码为什么是后续课程的桥
如果做完 reduce-scatter 后就停止,每个 rank 只保留归约结果的一片;如果再做 all-gather,每个 rank 又得到完整归约结果。ZeRO/FSDP 的很多设计就在这两个点之间选择:什么时候需要完整参数,什么时候只保存分片状态。
barrier、同步和 deadlock
\code{dist.barrier()} 让所有 rank 等到同一个同步点。它常用于 benchmark、调试打印、确保 warmup 完成。它也会暴露控制流不一致:如果某个 rank 进入了 barrier,另一个 rank 因条件分支跳过,程序就会卡住。
分布式 deadlock 常来自不一致
常见错误包括:某个 rank 少调用一次 collective、不同 rank 的 tensor shape 不一致、某些 rank 提前异常退出、print 或 dataloader 导致顺序错位。调试时先确认所有 rank 的 collective 顺序完全一致,再看性能。
本章小结
\code{torch.distributed} 的 API 看起来只是函数调用,但每个调用背后都是多进程同步协议。写分布式训练代码时,正确性约束包括数学结果、shape/dtype、调用顺序和进程生命周期。
通信 Benchmark:测的是带宽,也是算法
为什么要单独测 collective
官方讲义的 benchmark 不是为了得到一个漂亮数字,而是训练读者形成判断:某个集群上 all-reduce、reduce-scatter 的实际速度是多少,是否足以支持当前并行策略。若 benchmark 已经显示通信占比过高,继续调学习率或 batch size 都解决不了根因。
data = torch.randn(num_elements, device=cuda_if_available(rank))
dist.all_reduce(tensor=data, op=dist.ReduceOp.SUM, async_op=False)
torch.cuda.synchronize()
dist.barrier()
start_time = time.time()
dist.all_reduce(tensor=data, op=dist.ReduceOp.SUM, async_op=False)
torch.cuda.synchronize()
dist.barrier()
duration = time.time() - start_time
带宽估算公式
官方代码用一个环形通信直觉估算 all-reduce 的有效带宽:
其中 \(S\) 是单 rank 张量大小,\(N\) 是 world size,\(T\) 是一次 all-reduce 的 wall-clock duration。分子里的 \(2\) 来自 ring all-reduce 中 reduce-scatter 与 all-gather 两段都要传输数据;\((N-1)\) 表示每个 rank 需要参与多个传输步;分母的 \(N T\) 是把全局传输工作量归一到整体通信时间上的一种有效带宽口径。
reduce-scatter 的估算少一个 \(2\):
这里 \(S_{\text{input}}\) 是每个 rank 输入矩阵的总字节数。两者带宽可能相近,因为 all-reduce 可以看成 reduce-scatter 加 all-gather:通信量和时间都约翻倍,带宽口径未必翻倍。
不要只看 duration
同一个 collective 的 duration 会随 tensor size、world size、拓扑、NCCL 算法、warmup、同步方式变化。报告性能时至少要同时给出 bytes、world size、dtype、硬件拓扑和有效带宽。
常见测量陷阱
benchmark 的四个坑
- 没有 warmup:第一次通信可能包含初始化、连接建立、kernel 编译或缓存效应。
- 没有 \code{torch.cuda.synchronize()}:CUDA 异步执行会让计时只测到 launch time。
- 没有 barrier:不同 rank 开始/结束时间不一致,测出来的不是集体通信。
- 只测一个 tensor size:小消息看 latency,大消息看 bandwidth,两个区间结论不同。
本章小结
通信 benchmark 是并行策略选择的输入。它回答的问题不是“这台机器快不快”,而是“这个 collective 在这个张量大小和拓扑上是否足够快,能否放进训练 step 的关键路径”。
Data Parallelism:沿 batch 维切分
基本策略
Data parallelism 沿 batch dimension 切分数据。每个 rank 保留完整模型参数,读取自己的 batch slice,独立 forward/backward,然后用 all-reduce 同步梯度。同步后每个 rank 执行相同 optimizer step,因此参数保持一致。
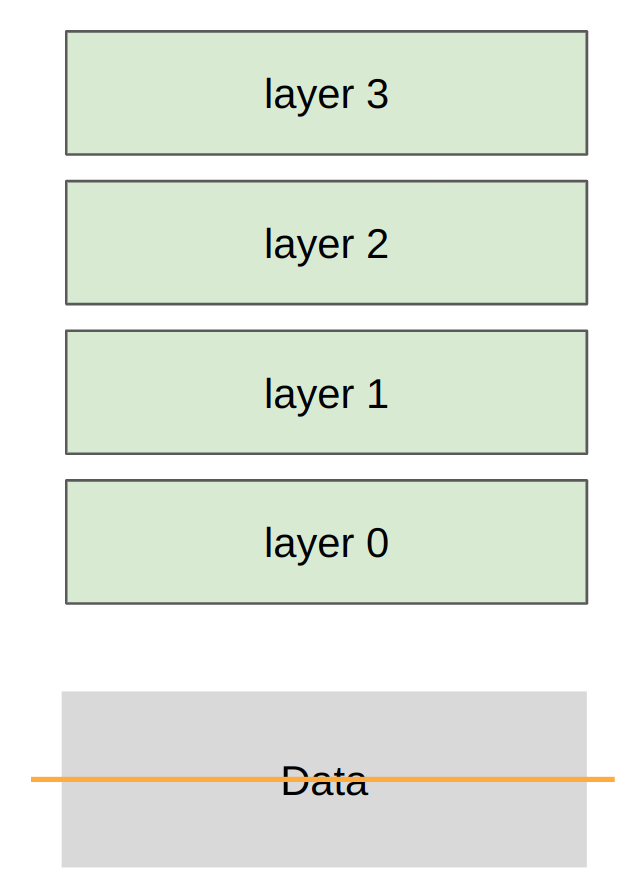
读图:data parallel 图里的“复制”和“切分”
图中每个 rank 都有完整网络层,所以参数、梯度和 optimizer state 默认是复制的;被切分的是 batch。这个策略的好处是每张卡可以独立做完整 forward/backward,通信只集中在梯度同步阶段。坏处是显存不随 GPU 数量线性扩展,因为模型状态仍然每卡一份。
local_batch_size = batch_size // world_size
start_index = rank * local_batch_size
data = data[start_index:start_index + local_batch_size].to(device)
for param in params:
x = x @ param
x = F.gelu(x)
loss = x.square().mean()
loss.backward()
for param in params:
dist.all_reduce(tensor=param.grad, op=dist.ReduceOp.AVG,
async_op=False)
通信账本
若模型参数总量为 \(P\) bytes,每一步 DDP 梯度同步的主通信对象也是 \(P\) bytes 级别的梯度。由于每个 rank 都要得到完整平均梯度,典型实现使用 all-reduce。计算量随本地 batch 增长,通信量主要随参数量增长,因此 data parallel 对“大 batch、较厚计算”的场景友好。
Data parallel 的优点和代价
优点是实现简单、数学语义接近单机大 batch、通信集中。代价是每卡保存完整参数、梯度和 optimizer state;若单卡装不下模型,普通 DDP 无法解决容量问题,只能引入 ZeRO/FSDP 这类状态分片方法。
为什么引出 FSDP/ZeRO
官方源写道:下一次会讲 FSDP/ZeRO,用 all-gather 和 reduce-scatter 避免每张卡都持有全部参数。直觉是:
- forward 某层前,用 all-gather 临时拼出该层完整参数;
- backward 后,用 reduce-scatter 同步梯度并只保留本 rank 负责的分片;
- optimizer state 也按 rank 分片,减少重复存储。
术语消化:DDP、FSDP、ZeRO 的差别
| 方法 | 保存方式 | 通信方式与课程关系 |
|---|---|---|
| DDP | 每卡完整参数、梯度、optimizer state。 | backward 后 all-reduce 梯度,简单但显存重复。 |
| ZeRO-1/2/3 | 按 stage 分片 optimizer state、梯度、参数。 | 用 reduce-scatter/all-gather 把复制状态改为分片状态。 |
| FSDP | PyTorch 中的 fully sharded data parallel。 | 以模块为单位 all-gather 参数、释放参数、reduce-scatter 梯度。 |
本章小结
Data parallelism 是最容易理解的并行策略:数据切开,模型复制,梯度同步。它扩展吞吐,但不天然扩展模型容量;状态分片才是解决大模型显存的关键。
Tensor Parallelism:沿 width 维切分
基本策略
Tensor parallelism 沿层内部张量维度切分,例如把矩阵乘法的输出宽度切给多个 rank。每个 rank 保存该层参数的一部分,计算一部分激活,然后通过 all-gather 或 all-reduce 恢复下一层需要的完整张量。
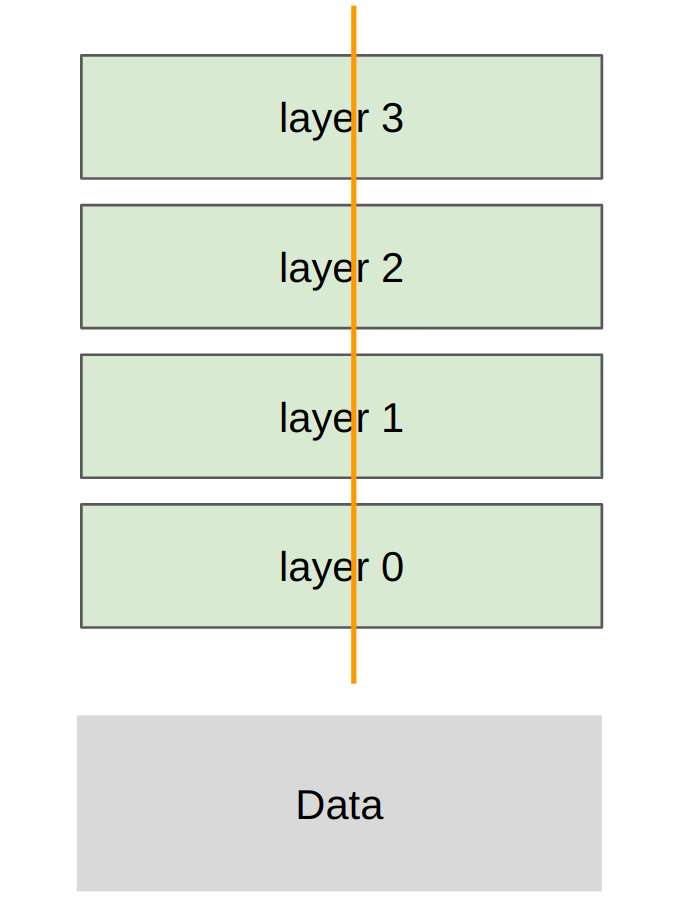
读图:tensor parallel 图说明的不是“多放几层”
图中每一层都被横向拆开,不同 rank 负责同一层的不同列或通道。这样可以让单层参数和计算分摊到多张卡上,但下一层往往需要完整激活,因此每层都可能发生通信。读图时要把它和 pipeline parallel 区分:tensor parallel 是同一层多卡一起算,pipeline parallel 是不同层放在不同卡上。
local_num_dim = num_dim // world_size
params = [get_init_params(num_dim, local_num_dim, rank)
for layer in range(num_layers)]
x = data
for layer in range(num_layers):
x = x @ params[layer]
x = F.gelu(x)
activations = [
torch.empty(batch_size, local_num_dim, device=device)
for _ in range(world_size)
]
dist.all_gather(tensor_list=activations, tensor=x,
async_op=False)
x = torch.cat(activations, dim=1)
列切、行切和通信位置
设输入 \(X\in\mathbb{R}^{B\times d}\),权重 \(W\in\mathbb{R}^{d\times h}\)。若按输出宽度切分 \(W=[W_1,W_2,\dots,W_N]\),rank \(i\) 计算:
其中 \(B\) 是 batch tokens 数,\(d\) 是输入 hidden size,\(h\) 是输出 hidden size,\(N\) 是 tensor-parallel world size。每个 rank 只算 \(Y_i\),但若下一层需要完整 \(Y\),就要 all-gather。Megatron-LM 风格会交替使用 column-parallel 和 row-parallel linear,把某些通信推迟或合并,但基本账本不变:切 layer width 就要在层边界恢复一致语义。
Tensor parallel 的通信频率很高
Tensor parallel 的通信常发生在每个 Transformer block 的多个线性层或 attention 子层边界。它适合放在 NVLink/NVSwitch 这类高速节点内互连上;跨节点使用时,通信延迟和带宽很容易压过局部 matmul 的收益。
反向传播为什么更复杂
官方源把 backward 留作 homework,是有意的:前向只要拼激活,反向还要处理梯度如何在切分维度上归约。列切时,输出梯度对应各自分片;行切时,输入梯度通常需要 reduce。真实框架会把这些规则封装到 parallel linear layers 里,但工程师仍要理解通信发生在哪个方向。
Tensor parallel 的正确性边界
不能随意把任意 tensor 切开就叫 tensor parallel。切分维度必须与算子数学结构兼容;否则虽然张量 shape 能拼回去,结果也可能不等价,或反向梯度不正确。
本章小结
Tensor parallelism 解决单层太宽、单卡装不下或算不快的问题。它牺牲的是高频通信,因此硬件要求最高。判断是否适合 tensor parallel,要先问每层通信能否被节点内高速互连承受。
Pipeline Parallelism:沿 depth 维切分
基本策略
Pipeline parallelism 沿层深度切分模型:前几层放在 rank 0,中间层放在 rank 1,后几层放在后续 rank。每个 rank 只保存自己的 layers,forward 时把激活从前一 stage 发送到后一 stage。
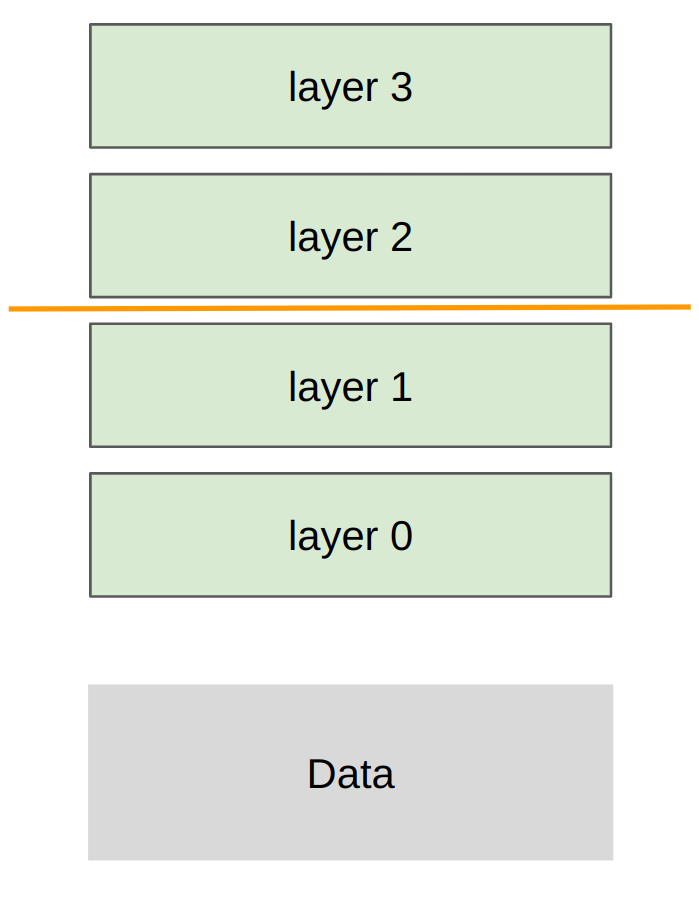
读图:pipeline parallel 图里的 stage 和 bubble
图中每张卡负责连续层段,数据像流水线一样从前向后流动。优点是通信只发生在 stage 边界,频率低于 tensor parallel;缺点是流水线刚开始和结束时部分 stage 空闲,这就是 bubble。microbatch 的作用是把一个大 batch 切小,让不同 microbatch 同时处在不同 stage,从而填满流水线。
micro_batch_size = batch_size // num_micro_batches
if rank == 0:
micro_batches = data.chunk(chunks=num_micro_batches, dim=0)
else:
micro_batches = [
torch.empty(micro_batch_size, num_dim, device=device)
for _ in range(num_micro_batches)
]
for x in micro_batches:
if rank - 1 >= 0:
dist.recv(tensor=x, src=rank - 1)
for param in local_params:
x = F.gelu(x @ param)
if rank + 1 < world_size:
dist.send(tensor=x, dst=rank + 1)
bubble 的直觉公式
若有 \(P\) 个 pipeline stages 和 \(M\) 个 microbatches,最简单 GPipe 式调度的前向 bubble 比例近似为:
其中 \(P-1\) 是填满流水线需要等待的 stage 数,\(M\) 是实际输入的 microbatch 数。增加 \(M\) 可以降低 bubble,但 microbatch 太小会降低 kernel efficiency,也会增加调度和通信次数。
Pipeline 的核心瓶颈是调度,而不只是带宽
Pipeline parallel 的通信对象通常是 stage 边界激活,频率低于 tensor parallel。但它引入调度问题:stage 时间不均、forward/backward 依赖、microbatch 数、activation 保存或重算策略,都会影响吞吐。
为什么 pipeline 能跨较慢链路
Pipeline stage 之间的通信发生在层段边界,粒度较粗。如果每个 stage 内部有足够多层和足够大计算,通信可以被较长的 compute window 吸收。因此 pipeline parallel 更可能跨节点使用。但这要求模型切分均衡:每个 stage 的参数量、计算量、激活大小和 backward 时间都要接近。
Pipeline parallel 不自动负载均衡
如果某个 stage 包含更重的 attention 或更宽的 MLP,它会成为全局吞吐瓶颈。真实系统常需要按 profiling 结果手工或自动调整层分配,而不是简单平均层数。
本章小结
Pipeline parallelism 解决深层模型容量和跨节点放置问题。它通信频率较低,但要付出 bubble、调度复杂度和 stage imbalance 的代价。
三种并行策略的比较与组合
切分对象决定通信形态
| 并行方式 | 切分对象 | 优点 | 主要代价 |
|---|---|---|---|
| Data parallelism | batch | 简单、吞吐扩展好、每卡完整 forward/backward。 | 模型状态复制,梯度 all-reduce 随参数量增长。 |
| Tensor parallelism | layer width / tensor dimension | 单层参数和计算可跨卡分摊。 | 每层高频通信,强依赖 NVLink/NVSwitch。 |
| Pipeline parallelism | layer depth | 模型深度可跨卡放置,通信较粗粒度。 | pipeline bubble、调度复杂、stage 负载均衡困难。 |
| Sequence/expert parallelism | sequence 或 experts | 支持长上下文或 MoE 参数扩展。 | attention/expert routing 通信和负载均衡复杂。 |
选择并行策略的第一原则
先看瓶颈是什么:如果单卡放不下状态,考虑 ZeRO/FSDP 或 pipeline;如果单层太宽,考虑 tensor parallel;如果吞吐不够但单卡放得下,先做 data parallel;如果 MoE expert 太多,考虑 expert parallel 和 all-to-all 负载均衡。
recompute、memory、communication 三角
官方总结里有一句非常好的工程判断:可以 recompute,可以存在本地 memory,也可以存在其他 GPU 的 memory 然后 communicate。三者是同一个问题的三个出口。
术语消化:三角权衡
| 选择 | 省了什么 | 付出什么 |
|---|---|---|
| memory | 不重算,不通信,最快读取。 | 占 HBM,单卡容量压力大。 |
| recompute | 少存激活或中间结果。 | 增加 FLOPs,可能拉长 backward。 |
| communication | 把状态放到别的 rank 或分片存储。 | 消耗网络带宽,增加同步依赖。 |
JAX/TPU 路线为什么看起来不同
官方源提到 JAX/TPU 路线:定义模型、定义 sharding strategy,编译器负责很多底层映射。PyTorch 课程选择从 primitives 讲起,是为了让读者看见底层机制。两者不是谁高谁低,而是抽象层不同:高层 sharding API 更省心,但当性能异常时,仍然需要理解 collectives、拓扑和通信账本。
抽象越高,越不能忘记通信账本
自动 sharding 可以搜索或生成并行计划,但目标函数仍然受物理通信约束。性能调试时,如果不知道某个 tensor 被 all-gather 了几次、某个 expert routing 是否 all-to-all,就很难解释 step time。
本章小结
Data、tensor、pipeline 不是互斥选项。真实大模型训练常把它们组合成 3D/4D parallelism:节点内 tensor parallel,节点间 data/FSDP,模型深度再 pipeline,MoE 层另加 expert parallel。组合的核心仍然是让高频通信留在快链路,让低频通信跨慢链路。
工程 Checklist:写分布式训练代码前先问什么
状态在哪里
第一组问题是状态放置:
- 参数、梯度、optimizer state、activation 是否复制?
- 哪些对象被 sharding?按 batch、width、depth、sequence 还是 expert?
- 哪个时刻需要完整副本?这个副本是长期保存还是临时 all-gather?
通信何时发生
第二组问题是通信时序:
- collective 是 all-reduce、reduce-scatter、all-gather 还是 all-to-all?
- 通信发生在每层、每个 block、每个 microbatch,还是每个 step?
- 是否能与 backward compute overlap?
- 是否有 barrier 或隐式同步破坏 overlap?
硬件是否匹配策略
第三组问题是拓扑匹配:
- 高频通信是否留在 NVLink/NVSwitch 域内?
- 跨节点链路是否只承载较粗粒度通信?
- NCCL benchmark 的实际带宽是否支持理论计划?
- 最慢 rank 或最慢 stage 在哪里?
最终判断标准
一个并行策略的好坏不由名字决定,而由每个 step 的端到端吞吐、显存峰值、扩展效率和稳定性决定。可解释的系统账本比“用了某某 parallelism”更重要。
本章小结
写分布式训练代码前,先画状态图和通信图。状态图告诉你什么被复制、什么被分片;通信图告诉你每个同步点移动什么张量、走什么链路。没有这两张图,调参只是猜。
拓展阅读
- Stanford CS336 Spring 2026 course page
- PyTorch distributed documentation
- NVIDIA NCCL user guide
- NCCL tests performance notes
- Sample all-reduce benchmark code
- Levanter: JAX-based distributed training stack from CRFM
Summary:总结与延伸
Lecture 7 的 Summary 可以压缩成一句话:分布式训练不是“把模型丢到很多 GPU 上”,而是用 collective operations 在硬件拓扑上实现某种 sharding/replication 计划。Data parallel 沿 batch 切,tensor parallel 沿 width 切,pipeline parallel 沿 depth 切;它们分别改变通信对象、通信频率和状态放置。
最终 takeaways
- 多 GPU 的两个动机是容量和速度:放不下,或想更快。
- Collective operations 是分布式训练的基础语言;all-reduce、reduce-scatter、all-gather 是工作马。
- \(\text{all-reduce}=\text{reduce-scatter}+\text{all-gather}\) 是理解 DDP 到 FSDP/ZeRO 的关键。
- Tensor parallel 通信频繁,通常要求 NVLink/NVSwitch;pipeline parallel 通信较粗粒度,但要处理 bubble。
- 真实训练系统是在 recompute、memory 和 communication 之间换瓶颈。
- 分布式优化必须用 benchmark/profile 验证,不能只按硬件规格表推断。
和下一讲的连接
本讲先搭起 collectives 和三种基本 parallelism。下一步自然是更系统地处理模型状态分片:ZeRO/FSDP 如何用 all-gather 和 reduce-scatter 降低 replicated state,以及怎样通过 overlap/prefetch 把通信藏到计算后面。