[CS25] Shaping the Future of AI from the History of Transformer — Hyung Won Chung, OpenAI
| 字段 | 内容 |
|---|---|
| 作者/整理 | 基于 Stanford CS25 课程资料整理 |
| 来源 | Stanford CS25: Transformer 深度研讨 |
| 日期 | 2024年5月15日 |
![[CS25] Shaping the Future of AI from the History of Transformer — Hyung Won Chung, OpenAI](cover.jpg)
演讲背景与议程
演讲人背景
Hyung Won Chung 是 OpenAI 的研究科学家,从 Google Brain 到 OpenAI,他始终聚焦大语言模型的高质量 instruction tuning 与可扩展训练流程。从 Flan-T5 到 PaLM 的指令微调管线,他不仅推动大型模型落地,更利用工程经验折射出理论洞察。
讲者背景速览
Hyung 参与了 PaLM-Instruct、T5X 训练框架、Scaling Instruction-Finetuned Language Models 等工作。他将 Transformer 从工程日报中抽象成“可撤销结构 + 规模”的通用思维,强调历史中留下的设计线索如何预示未来。
研究动机与议程
“AI is advancing so fast that it is hard to keep up / But not enough attention goes to the old things.” 这一开场将我们引向历史透视的逻辑:先识别驱动力,再回顾关键结构,最后以观察残差预测走势。第一部分的幻灯片(Slide 002-004)把焦点放在“研究者正在被短期技巧牵引”与“我们需要主动理解变革”的核心对话。
三步法简述
- 识别 dominant driving force(如算力增长);\
- 理解历史结构如何为当下提供可撤销的 inductive bias;\
- 用残差观察判断未来 trajectory,并保留“回退门槛”。
三步法的时间维度
分析不是一条平行线,而是一条由近及远的时间轴。Slide 3 强调:先搞清楚今天的 driving force,再回到过去的结构,最后预测未来的 trajectory,避免用未来的不确定性干扰现实的 measurement。
方法论与组织
Hyung 用一个“掉笔”实验比喻未来预测的困难:需要抓住布局、理解引力、再推理轨迹。因此本讲的逻辑层层递进,先从计算与规模谈起,再拆解 Transformer 结构,随后结合真实案例,最后回到未来战略与工程实践。
构建信念的三层路径
Find the driving force \(\rightarrow\) Decode the structure \(\rightarrow\) Predict how to scale while keeping options reversible。
演讲的教学逻辑
Hyung 以工程师的视角把 Transformer 史分为:driving force 维度、architecture 维度、deployment 维度。每一章都以“教学逻辑”组织而非字幕流水,以便读者理解为何要关注某张幻灯片而非逐字复述。
本章小结
本章建立了讲座采用的三步视角:先洞察动因,再还原结构,最后评估未来走向,并确定本笔记的写作顺序。
掌握变革:驱动因素与“苦涩教训”
识别多重驱动力
Hyung 用“掉笔”实验说明:真实世界充斥多种 driving force,因此直觉上的视野往往过窄。幻灯片 004-005 的可视化把 pen drop 的力、空气阻力、重力并列,并标注“难点在于力的交互与参数数量”,进而把焦点拉向 AI 研究中的 dominant driver。
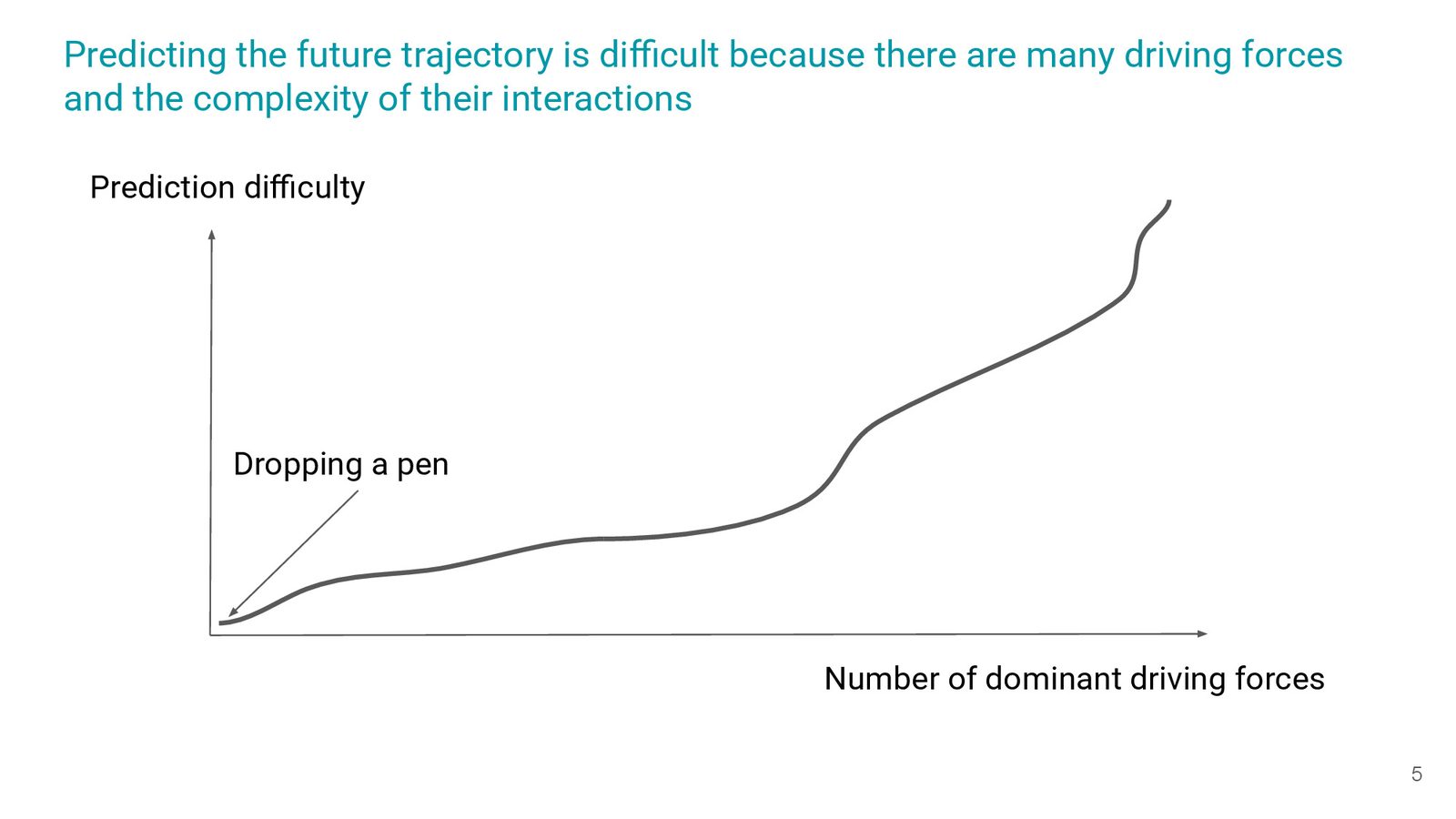
现实世界的 driving forces
- 重力、空气阻力:暗示模型训练中不同 inductive bias 的协同;\
- 复杂交互:提示我们不能只看某一项指标;\
- Dominant driver 是 compute & scale。
Compute 与 Scaling Laws
幻灯片 006-009 把 “brain-scale compute power” 具体化:每 5 年算力增长约 10 倍,趋势来自 Rich Sutton 的 WAIC keynote。Hyung 特别强调,工程选型需要与这条趋势对齐,短期的降维或过度结构可能在未来 10 倍算力释放下失去价值。
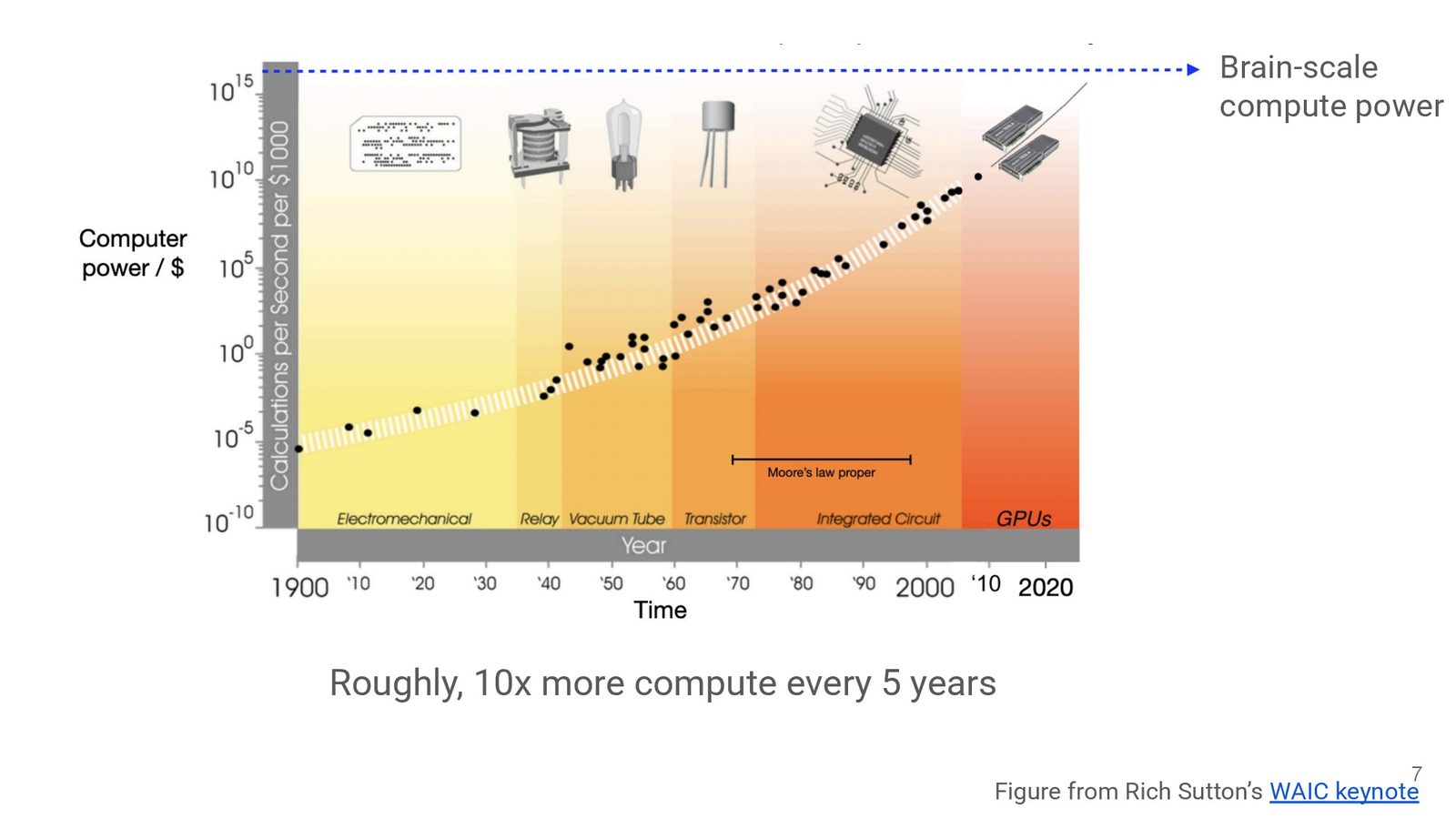
Scaling law 的工程启示
- Compute growth 超越常规模型能力;\
- 更弱的 inductive bias 让模型能在更多任务中泛化;\
- 未来 10 倍算力释放意味着需要 reserve architecture 选项。
“Less structure” 的耐久性
The Bitter Lesson 告诉我们:过去 70 年进展的主引擎不是精致结构,而是 general methods 与规模优化。Hyung 以此警示:即便现在弱结构略逊,长期依赖 general method 才能迎接指数级算力。
苦涩教训的反思
与其在每个任务上加入 ad-hoc bias,不如保持结构可撤销。幻灯片 008-012 通过“更少 structure、添加更多 data”对比强化这个观点:先选择 less structure、等 scale up 再“undo”。这不仅是一种训练策略,更是一种组织研究的思维。
不要过早锁死结构
过度依赖 task-specific head 或预定义 pipeline,使得未来 scale 无法快速撤销这些 inductive bias;结果是在更多算力到来时继续被旧结构牵引。
Compute vs Structure checklist
Hyung 在 Slide 007 与 Slide 009 之间反复提醒我们:需要在 “compute” 和 “structure” 之间保持动态平衡。以下 checklist 是在做 architecture decision 时可以复盘的点。
| 维度 | 行动要点 |
|---|---|
| Compute ramp-up | 确保候选结构可以在更高算力下训练而不引入新的 instability; |
| Inductive bias | 记下每个 bias 的初衷与条件,在扩张后审视是否仍带来 signal; |
| Deployment margin | 把 latency/throughput 作为最高优先级,避免只看 loss。 |
别让参数增加掩盖 scale risk
如果只关注 loss 降低,很容易忽略模型对特定 bias 的依赖;在 scale-up 过程中持续监测 structure cost 才能防止未来被旧架构锁死。
本章小结
本章聚焦 dominant driving force,与 scaling law、Bitter Lesson 同步:强调“先对齐 compute,再决定结构”,而后者只在需要时再逐步引入。
Transformer 架构演化的结构解码
变体速览
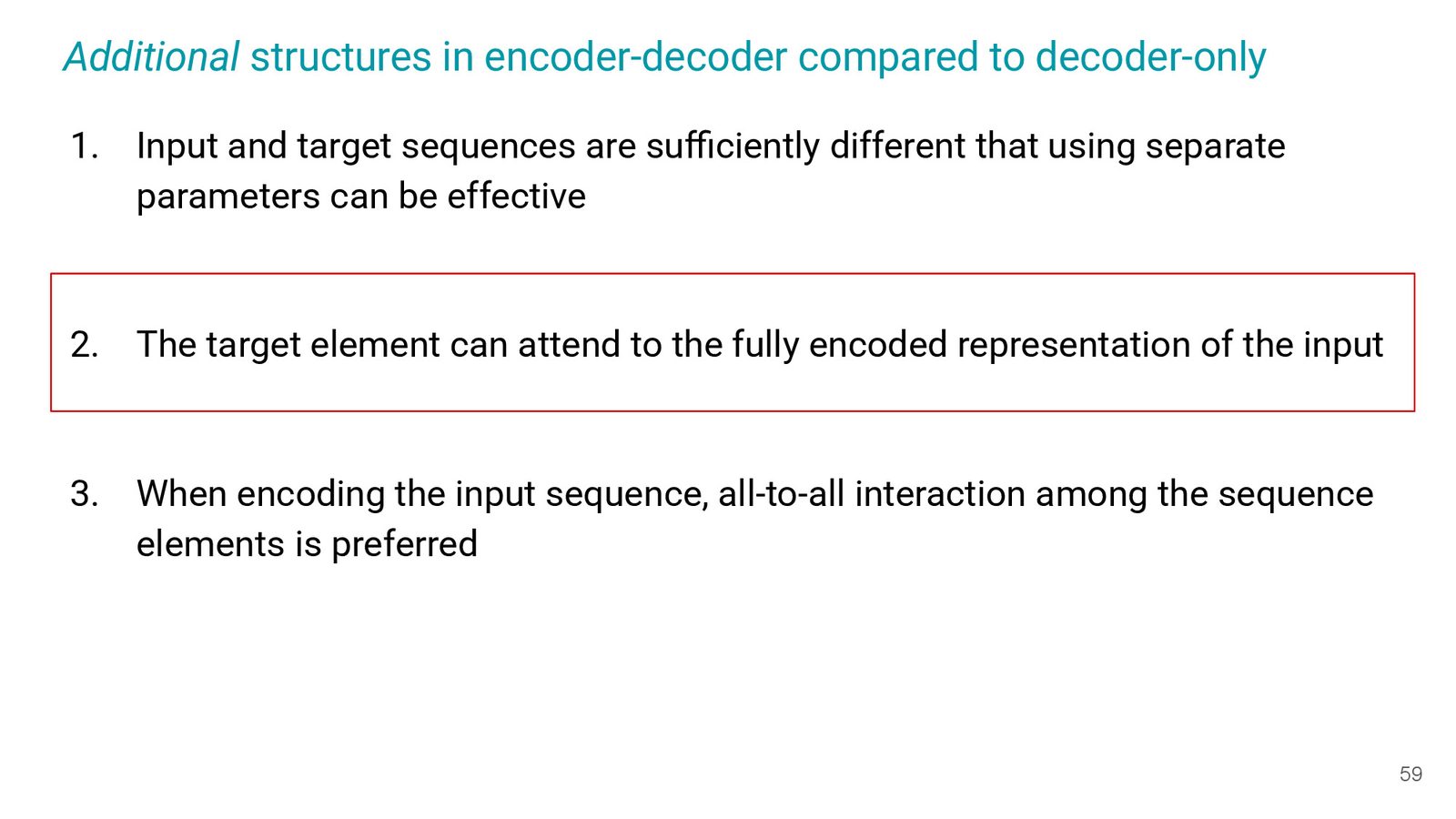
Transformer 的三大变体(Slide 016)分别是 encoder-decoder、encoder-only 与 decoder-only。从 attention pattern 到输出接口,每个变体对应一组 tradeoff:encoder-decoder 多了 cross attention,encoder-only 更适合分类任务,decoder-only 在生成任务中参数共享省时。
三类架构的对比
- Encoder-decoder:cross attention + 分离参数,适合翻译与长输入;\
- Encoder-only:双向 self-attention, 通常用于理解任务;\
- Decoder-only:参数共享 + 递归 causal,适合纯生成与指令微调。
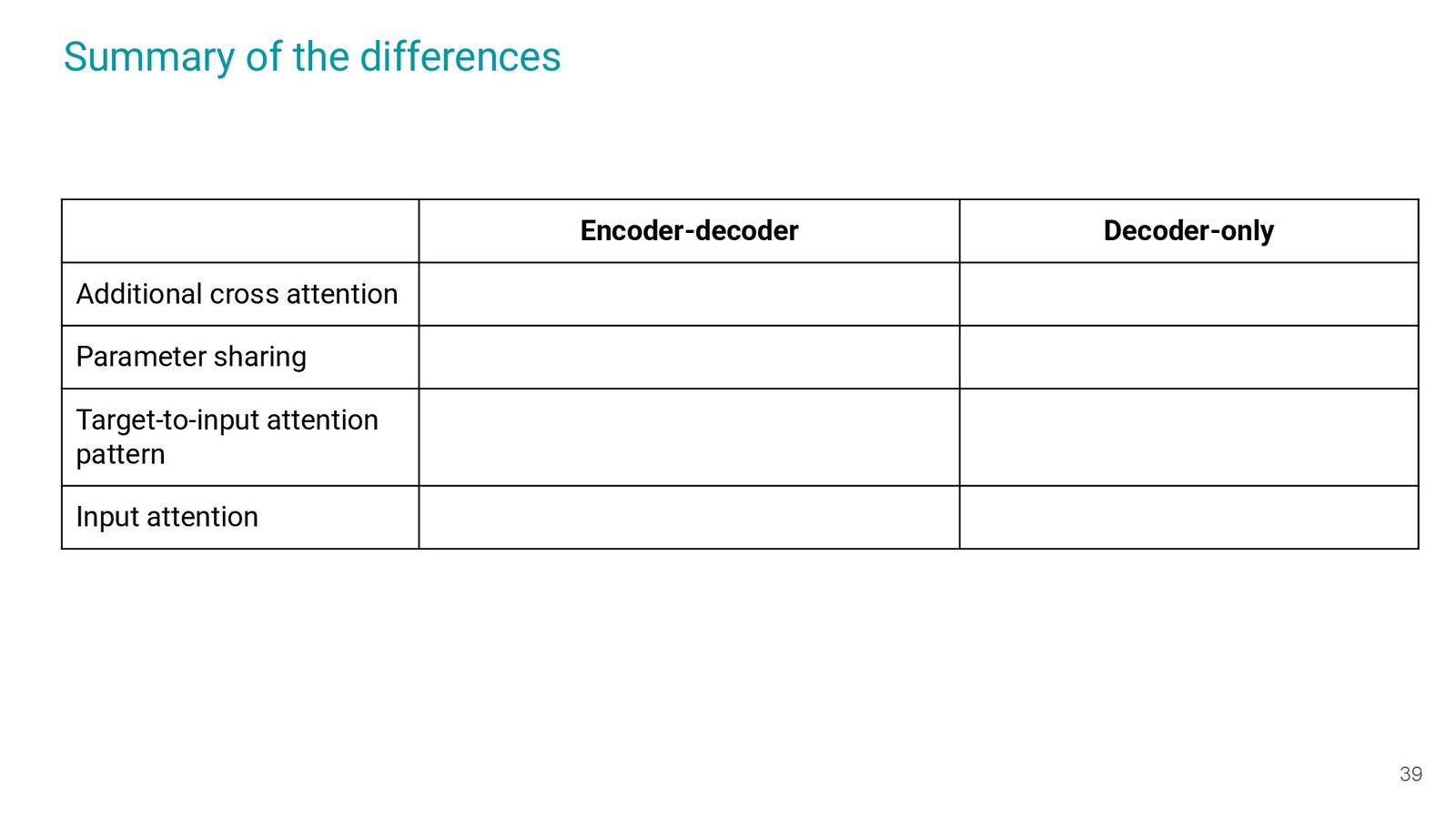
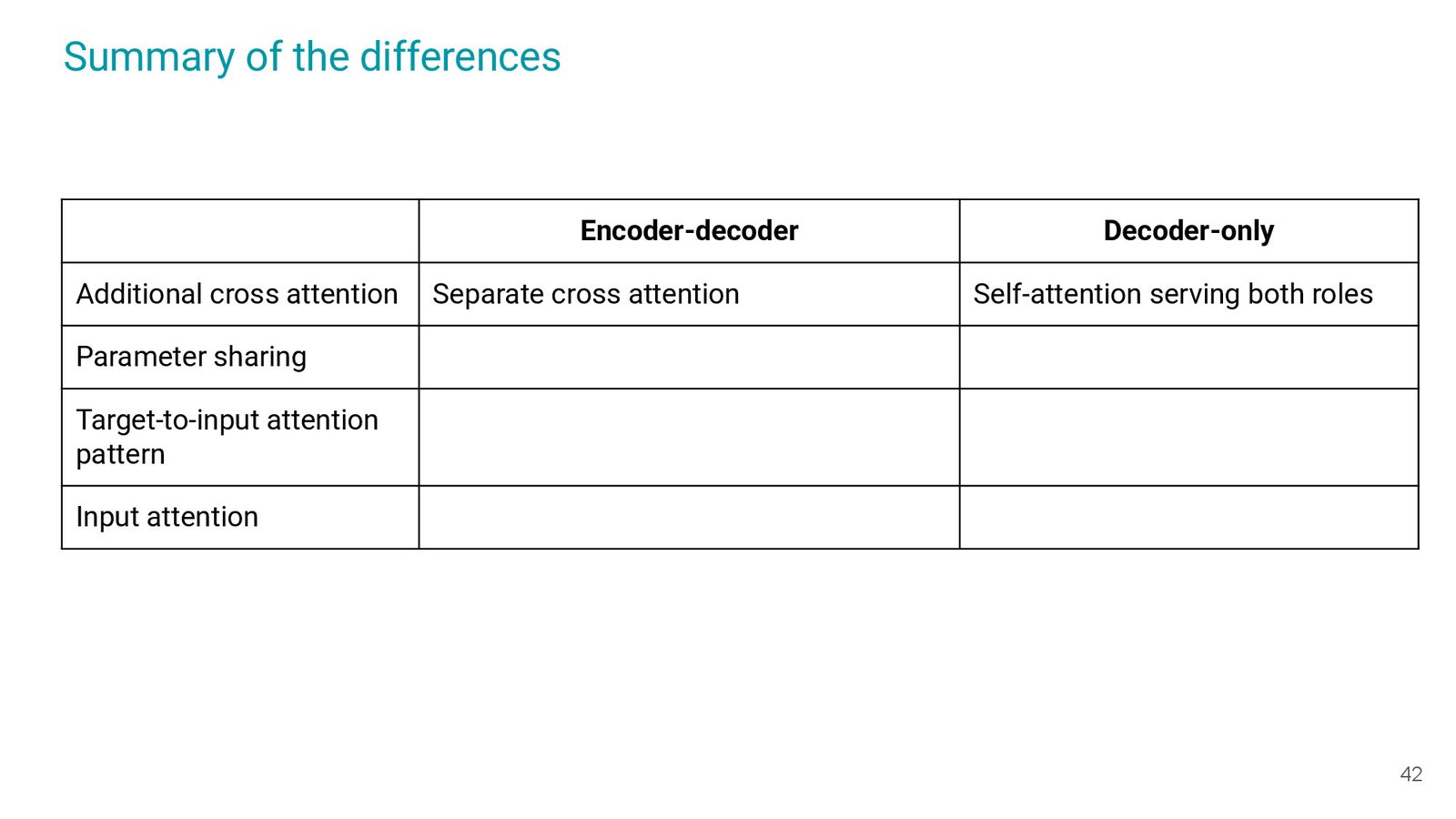
参数共享与 attention 重构
Slides 038-051 展示如何逐步从 encoder-decoder 过渡到 decoder-only:1) 共享 cross/self attention;2) 共享 encoder/decoder 参数;3) decoder layer 与 encoder layer 一一对应;4) encoder 自注意力变为 causal。每一步都是在“保留必要模式”的前提下移除冗余结构。
| 步骤 | 架构重构要点 | 工程意涵 |
|---|---|---|
| 共享 attention 参数 | cross/self 统一,减小内存开销 | 训练与推理使用同一计算图 |
| 共享 encoder/decoder 参数 | 简化优化目标 | 微调 pipeline 更通用 |
| 层内对齐注意力 | decoder layer l 只 attends encoder layer l | 降低跨层通信带来的复杂度 |
| Encoder causal化 | 使 encoder 与 decoder 同步 causal pattern | 赋予 decoder-only 生成能力 |
结构演化的设计原则
每次重构都要保留“会后可撤回”的能力:先去除结构,再观察 scale 反应,最终在未来需要时再引入新的 inductive bias。
跨层共享实验的观察
Slides 041-047 进一步对比了 encoder-decoder 与 decoder-only 的每一层 attention pattern:包括 cross attention 与 self-attention 共享、不同层之间的参数耦合以及 causal 迈向。讲者用这一系列幻灯片强调:每次共享都要判定 performance impact 与 training stability,然后再决定是否进一步撤销或恢复该结构。
共享实验的决策要点
- 共享 attention 参数:观察 training curve 与 memory usage;\
- encoder 与 decoder 参数一体化:watch for optimization interference;\
- decoder 绑定 encoder 同层:验证 cross-layer gradient flow;\
- encoder 变 causal:确认 autoregressive generation 不再需要 cross attention。
信息流与 cross attention 瓶颈
Slides 059-062 提出一个关键问题:如果 decoder 只 attend encoder 最后一层激活,那么 deep encoder 的信息会在到达 decoder 前失去分层语义。Hyung 通过 vision 类比说明底层与顶层 encode 的差异,暗示需要融合多层信息或局部 attention。
Cross attention 信息瓶颈警示
当 encoder 非常深时,仅访问最终激活会漏掉低层局部信息;建议探索 cross-layer attention 或 skip connection 解决。
本章小结
本章拆解 Transformer 架构的演化路径,既介绍变体差异,也强调每一步重构的原则与潜在瓶颈,为后续部署与未来趋势打下基础。
底层表示与序列建模
Embedding 与流程视图
Slides 017-021 提供了 Transformer 底层表示的多视角:tokenization、embedding、sequence model 的处理流程。右侧的概率分布/向量弹簧图(Slide 018)显示了如何将 tokens 映射为 \(\left[d_{\text{model}}, \text{length}\right]\) 的矩阵,再交由自注意力模块捕捉序列关系。
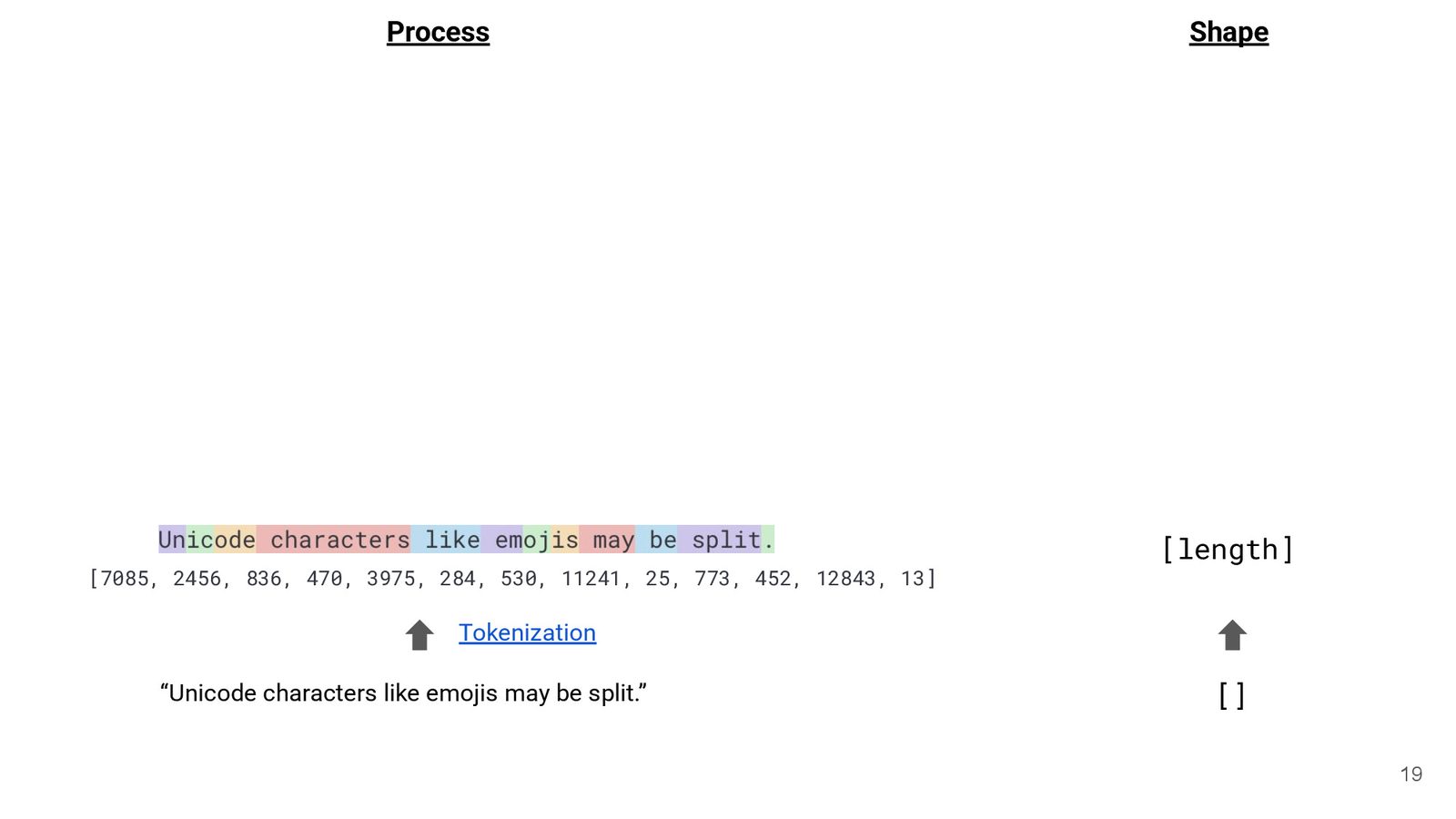
序列建模的梯度流程
- Tokenization 产生
[length]的索引序列;\ - Embedding 将索引映射为高维 \(\left[d_{\text{model}}, \text{length}\right]\);\
- Self-attention/MLP 迭代捕捉位置与语义;\
- 输出再次映射回 vocabulary space。
Tokenization 与位置信息
Slides 019-022 进一步拆解 tokenization 过程:Unicode(如 emoji)可能被拆分为多个 token,而输入序列则通过位置编码与 embedding 一起喂入 Transformer。讲者强调:不要让 tokenization 过度依赖任务(如仅对话),否则模型将失去 generality。
Tokenization 的普适原则
保持 pipeline 可扩展:确保 tokenizer 能处理新字符、保持 position embedding 的连续性,并避免在 early stage 针对某些 tokens 做特殊处理,否则未来 scale-up 时难以撤销。
![Slide 20 细化 tokenization 后的 process 以及多维向量([d_model, length])的分布。](slides-images/slide-020.jpg)
不要把 position encoding 固化到 tokenizer
将 position encoding 嵌入 tokenizer 或在 preprocessing 里硬编码,会在以后很难升级到异长或者 streaming 模式;建议把 position strategy 与 tokenization 分离。
本章小结
本章通过底层表示流程与 tokenization 的视图,提醒我们即便在高层结构演化后,最底层的输入表示也必须保持 general,用以承接未来的可撤销架构。
案例解读与工程支撑
机器翻译与学术 finetune 数据
在 Machine Translation 以及 Scaling Instruction-Finetuned Language Models(Slides 53-58)中,encoder-decoder 曾经获益良多:输入与输出分别在不同语言、不同长度段。随着数据转向多轮对话与 open-ended generation,这种差异缩小,decoder-only 开始胜出。
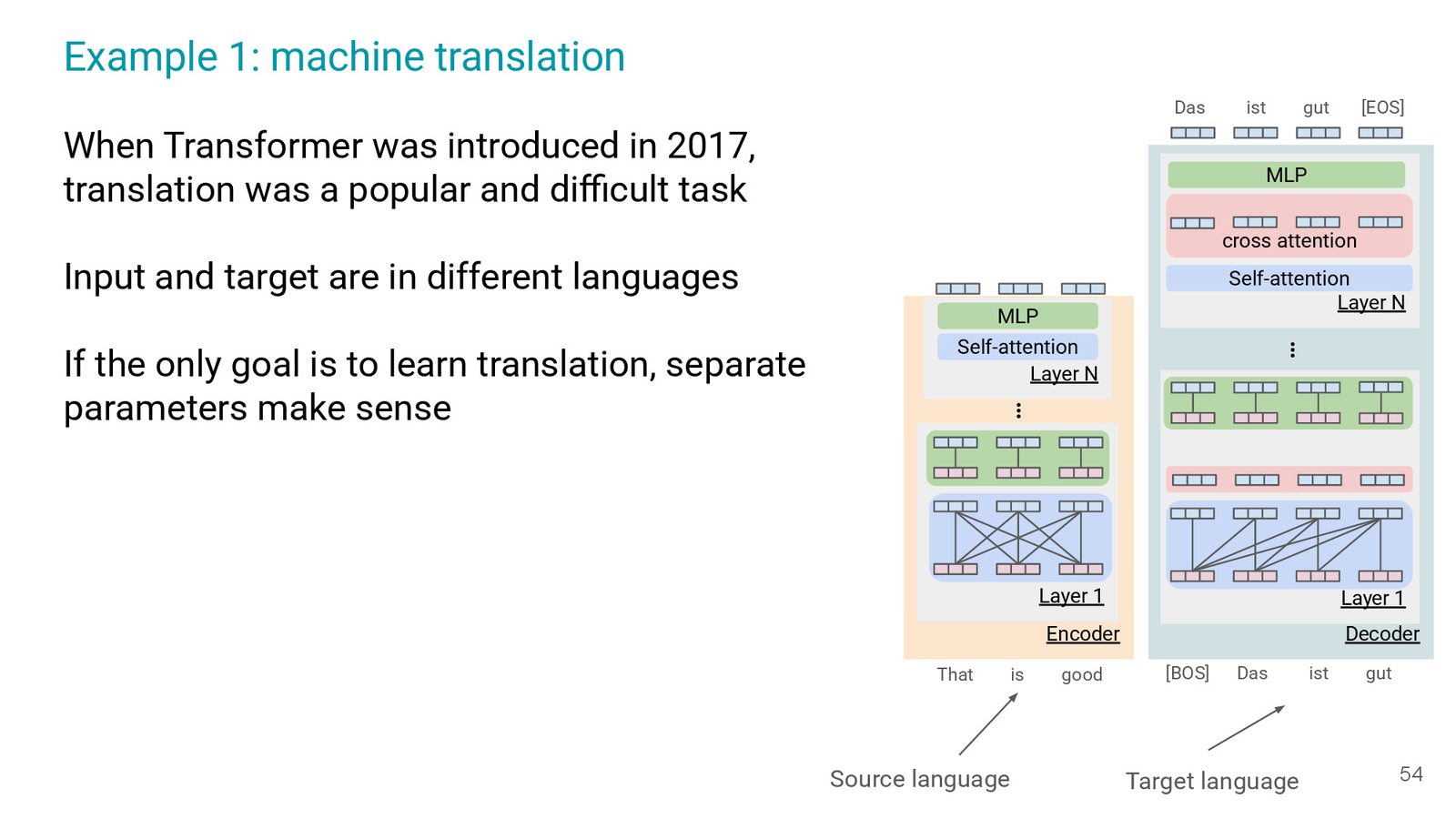
| 情境 | 为什么 encoder-decoder 曾有效 |
|---|---|
| 传统翻译 | 输入/输出分属不同语言,cross attention 可捕捉对齐; |
| 学术 finetune | 长输入 + 短输出,使 decoder-only 过早生成; |
| 长指令/对话 | 随着输出增长,decoder-only 更容易扩展与部署。 |
数据分布与结构选择
选择架构之前,要先看数据的 length distribution、input vs output semantics。旧的翻译场景强调“有界输入+短输出”,而新的长对话强调“输出也是长序列”,容易让 decoder-only 更省成本。
多轮对话与 attention 模式
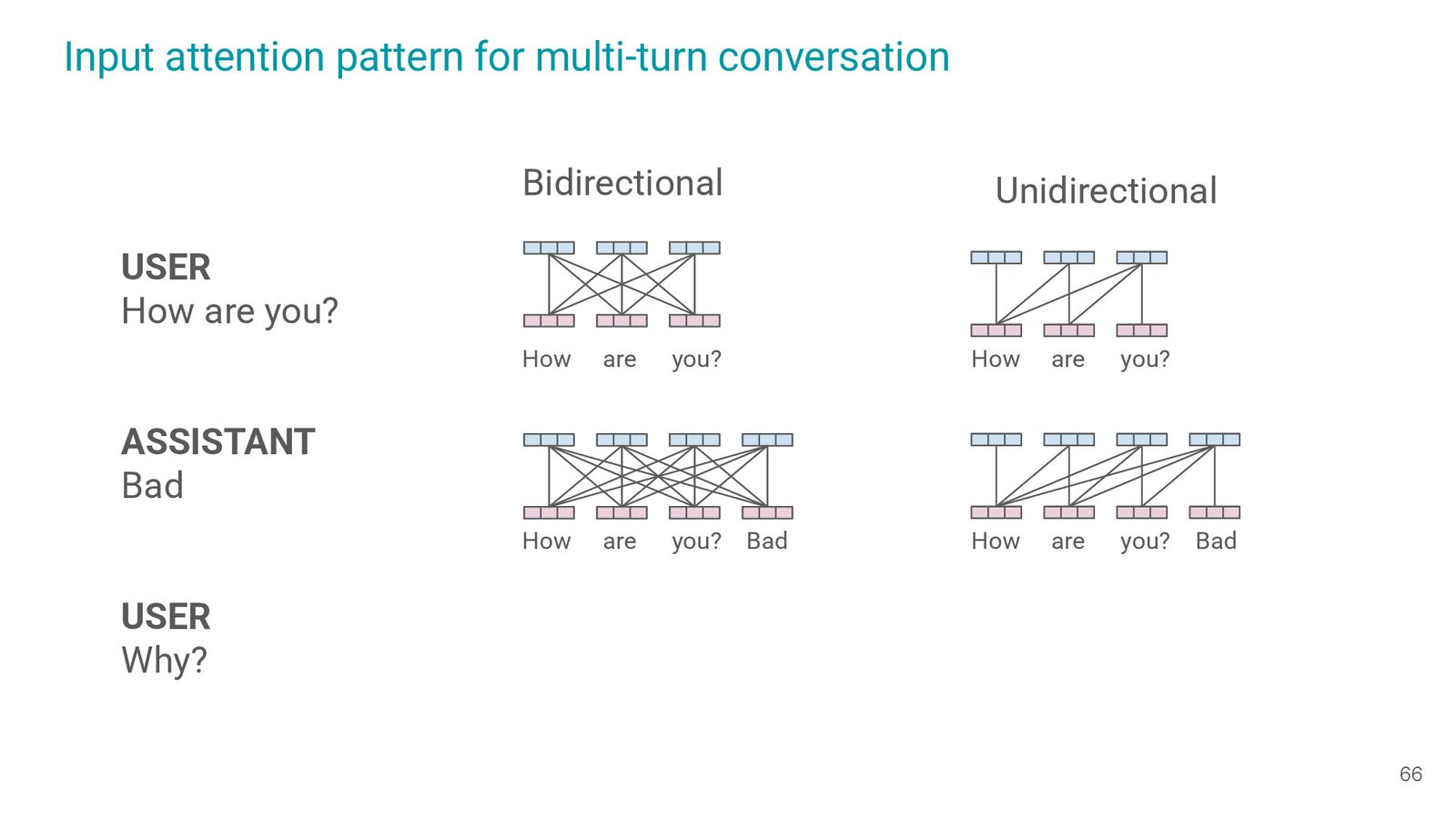
Slides 64-65 直接对比 bidirectional 与 unidirectional attention 在 multi-turn conversation 中的工程成本。双向模式对每轮都要 re-encode,全历史参与,而 causal 的 unidirectional 可复用之前的 hidden states,延迟与计算负担更小。
多轮对话中的工程负担
对话系统的部署必须在 latency 与 accuracy 之间权衡;unidirectional attention 在每轮仅处理新增 message,延迟更低、可扩展性更强。
工程 checklist
从 Slide 61 的“信息层级”讨论出发,工程上必须整理哪些层的 activation 对哪类任务更关键。我们建议写出表格标注:低层激活负责局部纹理/语法,高层激活负责句子意义。再在部署时评估 cross-layer attention 是否必要。
层级信息 vs 任务类型
CV、NLP 中均存在低中高层差异;当任务需要细粒度推理时,需额外捕捉低层激活;而通用生成任务更依赖 high-level semantics。
指令微调数据的长度分布
Slides 057-058 给出不同 academic dataset 的长度分布:input 通常很长、output 很短,这在 instruction fine-tuning 中曾是一种可控结构。但随着 dataset 变成更长的 prompt-答对和 multi-turn dialogue,这种差异变得模糊。
| 数据类型 | 作用 |
|---|---|
| 输入长、输出短 | 适合 encoder-decoder,encoder 提供丰富上下文; |
| 对话/ Instruction dataset 中长输出 | decoder-only 更易扩展,training pipeline 更简单; |
| 长 prompt + 长输出 | 需要解耦 positional strategy,避免 cross attention 频繁重编码。 |
数据分布演进的教训
不要让当前 dataset 的形态决定永久结构;在数据演进的过程中把结构设计为可撤销的模式会更适合 long-lived 系统。
本章小结
本章通过翻译、指令微调与多轮对话的案例,明确结构与数据分布的对齐方式,并提供工程 checklist,避免未来部署时被结构锁住。
未来轨迹与可撤销结构
可撤销结构的哲学
Slides 66-67 再次用三步法收尾:发现 driving force、分析结构、预测未来。Hyung 把结构定义为“可以撤销、可以重构”的 unit,使团队在面对未知 tasks 还能快速 pivot。
可撤销结构的定义
在 architecture design 中保留“回退通道”,避免将结构 hard-coded 到 deployment pipeline,便于 future scaling 或任务迁移。
未来预测与工程弹性
Hyung 提出:随着算力继续指数增长,我们要优先保留 general method,并在真正需要时引入 local inductive bias。这代表组织在做 research roadmap 时要准备“回退门槛”,确保每项新增结构都可在未来迅速 remove。
未来路线图的工程弹性
- 让 architecture design 支持“add & rollback”;\
- 记录每一个 inductive bias 的初衷与 withdrawal 条件;\
- 在 experiments 中同时追踪 scale response 与 structure cost。
工程要点清单
在 Slide 066 的三步法之外,我们还需要一个实际的工程清单:哪些指标需要定期检查、哪些结构需要可撤销的 fallback。下面的表格提供了几个值得监控的维度。
| 维度 | 检查事项 |
|---|---|
| 结构成本 | 记录每个 bias 的 parameter count、memory use 与 training instability; |
| Scale response | 在每次算力翻倍后测量模型性能与 loss 曲线,判断是否重新引入 structure; |
| Deployment metrics | 延迟、吞吐、cost per token,为结构选型提供量化依据。 |
持续估量的核心信念
Scale 不是一次性的实验,而是一个持续的监控流程;保持成对的 metric(performance & cost)才有助于防止结构的“隐藏债务”。
本章小结
本章将未来预测与可撤销结构捆绑,强调在 scale 的浪潮中保留“回退选项”,以便在新的 driving force 出现时迅速调整。
观察与行动
关键幻灯片速读
为了方便快速回顾,下面这张表把几组代表性的幻灯片与对应的 action 关联起来,便于 future reference。
| 幻灯片 | 关注点 |
|---|---|
| Slide 003 | 识别-理解-预测的三步法,提醒我们先看 compute,再看 structure; |
| Slides 038-045 | 结构演化的实验步骤,记录每次共享/撤销的条件; |
| Slide 058 | instruction dataset 的长度分布,检验当前架构是否仍适配; |
| Slides 064-066 | attention 模式与未来可撤销结构的策略,确保每次扩张都有 fallback。 |
观察不能停留在表面
看完幻灯片后不要只是“记住标题”,而是把每张图对应的 action 写成 checklist:算力翻倍后重跑?结构口子能撤回?否则很容易复刻“学完就忘”的模式。
实践反馈循环
每一次实验之后都要进行复盘:记录(1)该架构在当前 scale 下的 behavior,(2)指令或对话 dataset 中是否有新的偏移,以及(3)是否需要把结构 rollback。这个循环要和近期每周的 engineering review 同步,形成闭环。
反馈循环模板
- 记录 pre-scale 的 metric;\
- scale 后对比 loss/latency/training stability;\
- 如果 structure cost 升高且效益不突出,就回退;\
- 每次 rollback 都要写入 change log,供 future team 复用。
本章小结
本章整理出多个幻灯片与工程动作的 mapping,并强调持续反馈与 rollback 的全流程复盘,为长期维护笔记中的观点提供执行层面的支撑。
总结与延伸
核心总结表
| 维度 | 核心洞察 | 实践启示 |
|---|---|---|
| 动力识别 | 算力指数增长是 dominant driver,短期结构不能绑住未来。 | 设计实验与研究指标时要 align compute growth。 |
| 架构演化 | Encoder-decoder 到 decoder-only 的演进展示了需要兼顾参数共享与 cross attention。 | 先去除冗余结构,再在 scale 下评估是否需要添加 bias。 |
| 案例与部署 | 结构是否适配取决于数据分布(长度、语义)与 latency 约束。 | 写 checklist、画 attention 模式图,并持续跟踪部署成本。 |
| 未来策略 | 可撤销结构 + scale 是长期路径,必须保留跳出当前投资的能力。 | 每次新增结构时都记录“撤回触发条件”。 |
进一步阅读
- The Bitter Lesson,Rich Sutton:从历史看“少假设、多规模”的长期胜者。
- Scaling Laws for Neural Language Models,Kaplan et al.:长期 compute 与 loss 的准则。
- Transformer,Vaswani et al.:架构演进的起点与 cross attention 原理。
- Scaling Instruction-Finetuned Language Models,Chung et al. (2022):本讲引用的长指令 fine-tune 实验。
- Hidden Technical Debt in Machine Learning Systems,Sculley et al.:结构在生产所引发的维修成本。
操作建议
落地操作梳理
- 每周为 scaling experiment 写一个 CSS(Compute-Structure-Safety)报告:记录算力、结构变化与安全检查;\
- 用幻灯片索引(Slide 038, 065, 066)作为 review checklist,确认是否按计划撤销结构或扩张;\
- 把 tokenization/position pipeline 做成独立模块,方便 future fallback;\
- 定期更新 engineering log(包括 rollback 条件与 scale reaction),形成跨团队共享的知识库。
行动的节奏感
Hyung 提醒我们需要“做快节奏的实验 + 保持慢节奏的复盘”。快速迭代在 high compute era 中是常态,在每轮之后都要停下来问:有什么结构正在慢慢生锈?这个节奏感可以帮助团队避开“看起来有效但越来越难扩张”的路径。
本章小结
通过本讲构建的三步法,我们用历史数据标定动力、用结构拆解架构、再用 engineer mindset 设计可撤销的未来,以便面对下一个规模化浪潮。